Ефект у виготовлювача може бути виражений величиною прибутку, що одержить підприємство-виготовлювач після реалізації запланованого на рік обсягу продажів. Сума прибутку Пр визначається як різниця між ціною і загальною величиною витрат, обчислені на річний обсяг або питомий прибуток.
|
 .
.
де N Г - річний обсяг виробництва, шт. N Г = 1000 штук.
З П – повна собівартість виробу, грн.
 грн.
грн.
Податок на прибуток складає 30% від П Р.
|
 ,
,
де Н П - податок на прибуток;
 грн.
грн.
Прибуток, що залишається в розпорядженні підприємства ПОСТ:
|
 ,
,
 грн.
грн.
Визначаємо змінні витрати РП на одиницю виробу:
|
 ,
,
 грн.
грн.
Умовно-постійні витрати РУП визначаються на річний обсяг виробництва:
|
 ,
,
 грн.
грн.
Визначаємо крапку беззбитковості 
|
 ,
,
 шт.
шт.
На рисунку 8.1 показаний графік беззбитковості.
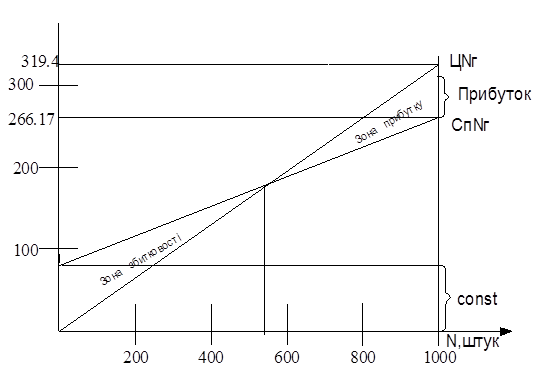
Рисунок 8.1 – Графік беззбитковості
З графіка беззбитковості (рис 8.1) виходить, що підприємство-виготовлювач зможе діставати прибуток після реалізації 537 шт. До цього значення обсягу підприємство буде збитковим. А при обсязі 1000 штук прибуток становить 53230 грн. Прибуток після вирахування податку складе 37261 грн, що відповідає ТЗ.
ВИСНОВКИ
У даному дипломному проекті була спроектована система автоматичного керування положенням електрода в процесі виправлення алмазного круга електроерозійним методом. За допомогою цієї системи керування розподіляються реальні імпульси по видах: імпульс ХХ, робочий імпульс, імпульс КЗ. У проекті були використані: компаратори серії LM339N, для порівняння реального імпульсу з гранічними значеннями, щоб визначити вид імпульсу, тригери мікросхеми ДО561ТР2, що використовувалися як запам'ятовуючий пристрій і дешифратор, що дешифрував логічний результат тригерів у двоїчний код для передачі його в мікроконтролер, що у свою чергу обробляє результат, видавав його на екран РКІ і керує кроковим двигуном.
Розроблена система дуже спростить роботу оператора і заощадить багато часу при виборі оптимального режиму виправлення електроерозійним методом.
перелік посилань
1. Терещук Р.М. "Напівпровідникові приймально-підсилювальні пристрої". Київ, 1989 р. –799 с.
2. Горюнов Н.Н. «Довідник по напівпровідникових діодах, транзисторам і інтегральним схемам». М.: ЕНЕРГІЯ, 1979р.-744 с.
3. Шило В.Л. «Полуполярні цифрові мікросхеми». Челябінськ.: МЕТАЛУРГІЯ, 1989р.-352 с.
4. Цокур В.П. «Дисертація на змагання ученого ступеня кандидата технічних наук на тему: Підвищення продуктивності і якості обробки важкооброблюваних матеріалів при алмазному шліфуванні з електроерозійним впливом на робочу поверхню круга» 1994р.-259 с.
Додаток А – Технічне завдання
ЗАТВЕРДЖУЮ:
Зав. кафедрою АТ
Бесараб В.І.
“15” березня 2007 р.
Дата: 2019-12-10, просмотров: 400.