ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
ДИПЛОМНИЙ ПРОЕКТ
Донецьк-2007
У комплексному проекті: „Спроектувати агрегатний верстат для обробки отворів у кронштейні та процес заточування свердел алмазними кругами з електроерозійним впливом на його робочу поверхню”
Спецчастина 2. „Спроектувати систему автоматичного керування положенням прав ’ ящего електрода в процесі електроерозійної правки алмазного круга на базі персонального комп ’ ютера”
1. Тема проекту (роботи) Спроектувати систему автоматичного керування положенням прав ’ ящего електрода в процесі електроерозійної правки алмазного круга на базі персонального комп ’ ютера.
затверджена наказом по інституту від “ 15” березня 2007 р.№ 278-14
2. Термін здачі студентом закінченого проекту (роботи) 27.06.2007р.
3. Вихідні дані до проекту (роботи)_результати роботи по НДРс, курсовий проект з проектування
4. Зміст розрахунково-пояснювальної записки (перелік питань, що їх належить розробити) 1_Аналіз т ехнологічного процесу алмазної обробки матеріалів . 2 Сучасні методи обробки та правки амазних кругов . 3.Методика рєєстрації одиничних імпульсів та їх класифікація 4. Розробка функціональної схеми 5. Технічна реалізація. 6. Розробка програмного забезпечення. 7 Розрахунок надійності системи. 8 Розрахунок економічної ефективності.
РЕФЕРАТ
Дипломний проект: с., рис., додатків, джерел, табл.
У даній роботі спроектована система автоматичного управління положенням електрода в процесі електроерозійної правки алмазного круга на базі мікроконтролера.
Вивчено сучасні методи електроерозійної обробки при шліфуванні твердих матеріалів і сучасна методика реєстрації одиничних імпульсів і їхні види для визначення режимів максимальної продуктивності електроерозійного виправлення. Довідалися вплив різних видів імпульсів на процес виправлення.
Виготовлено реальну модель і програмне забезпечення до неї, і вона перевірена на працездатність.
АЛМАЗНИЙ КРУГ, ОДИНИЧНИЙ ІМПУЛЬС, ЕЛЕКТРОЕРОЗІЙНА ОБРОБКА, ІМПУЛЬС КОРОТКОГО ЗАМИКАННЯ, ІМПУЛЬС ХОЛОСТОГО ХОДУ, РОБОЧИЙ ІМПУЛЬС, ЗВ'ЯЗУВАННЯ, АЛМАЗНЕ ЗЕРНО, РЕЖИМ ВИПРАВЛЕННЯ, МІКРОКОНТРОЛЕР, РІДКОКРИСТАЛИЧНИЙ ІНДИКАТОР.
ЗМІСТ
ПЕРЕЛІК СКОРОЧЕНЬ
ВСТУП
1. Профілювання алмазних струмопровідних кругов способом теплового впливу (електроерозійний метод)
1.1 Фізичні основи електроерозійної обробки алмазоносного шару
2. Сучасні методи електроерозійної обробки при шліфуванні твердих матеріалів
3. Методика реєстрації одиничних імпульсів і їхня класифікація
4. Розробка функціональної схеми
5. Технічна реалізація
5.1 Розрахунок ланки виділення імпульсів різної амплітуди і вибір елементів
5.2 Розрахунок і вибір елементів для реалізації блоку опорних напруг
5.3 Вибір компараторів
5.4 Вибір тригерів і принцип їхньої роботи
5.5 Проектування формувача скидання тригерів і дозволу рахунка
5.6 Проектування шифрувача і вибір елементів для його реалізації
5.7 Вибір мікроконтролера і рідкокристалічного індикатора
5.8 Вибір крокового двигуна і управління їм
6. Розробка програмного забезпечення
6.1 Розробка алгоритму
6.2 Опис інтерфейсу користувача
7. Розрахунок надійності системи
8. Техніко-економічне обґрунтування розробки і виробництва САК положенням правлячого електрода в процесі електроерозійного виправлення алмазного круга
8.1 Розрахунок собівартості і ціни приладу
8.1.1 Розрахунок вартості основних матеріалів
8.1.2 Розрахунок вартості куплених комплектуючих виробів
8.1.3 Розрахунок основної заробітної плати
8.2 Розрахунок валового прибутку і побудова графіка беззбитковості
ВИСНОВКИ
ПЕРЕЛІК ПОСИЛАНЬ
ДОДАТОК А. Технічне завдання
ПЕРЕЛІК СКОРОЧЕНЬ
САУ – система автоматичного управління
МЕП – міжелектродний простір
ЕЕО – електроерозійна обробка
КЗ – коротке замикання
РИ – робочі імпульси
ХХ – холостой хід
ЕЕП – електроерозійна правка
СОЖ –
ЧКЗ – часткове коротке замікання
РКІ – рідкокристалічний індикатор
ВСТУП
Успішне розв’язання задач прискорення науково-технічного прогресу нерозривно зв'язано із широким освоєнням передових технологій, підвищенням продуктивності праці і поліпшенням якості виробленої продукції.
Особливо це відноситься до так називаних важкооброблюваних матеріалів, використовуваним останнім часом при виробництві машин і механізмів, що працюють в екстремальних умовах, обробка яких зв'язана з визначеними труднощями. До таких матеріалів відносяться титанові сплави, що застосовуються в різних галузях техніки через високих міцностних характеристик, малої щільності й інших специфічних властивостей, ванадієві швидкорізальні сталі, що мають високу зносостійкість і міцність.
Використання для їхньої чистової обробки шліфування абразивними кругами характеризується низькою продуктивністю і, у ряді випадків, не задовольняє вимогам, пропонованим до якості обробки.
Серед нових високопродуктивних технологічних процесів обробки важкооброблюваних матеріалів у даний час усе більш широке поширення одержує алмазне шліфування кругами на металевому зв'язуванні, заправленими електроерозійним способом, або комбіновані способи алмазного шліфування з підтримкою в процесі обробки властивостей, що ріжуть, робочої поверхні круга за допомогою електроерозійних впливів.
Електроерозійні впливи на робочу поверхню круга. можуть виконуватися по двох схемах - з підведенням технологічного струму в зону різання або в автономну зону. Обидві схеми знайшли своє застосування при обробці зносостійких штампових сталей, нержавіючих сталей, магнитотвердих сплавів і інших твердих металів і сплавів.
Разом з тим, відсутні рекомендації з вибору способів алмазного шліфування з підтримкою властивостей круга, що ріжуть, за допомогою електроерозійних впливів при обробці титанових сплавів і ванадієвих швидкорізальних сталей, що стримує застосування нових способів шліфування при обробці цих перспективних матеріалів.
Не досліджені шляхи підвищення продуктивності електроерозійного виправлення за рахунок керування процесів з урахуванням видів одиничних імпульсів, інтенсифікації керування механічного руйнування алмазних зерен і ін. Відсутні зведення про вплив схем підведення технологічного струму на вихідні технологічні показники обробки титанового сплаву ВТГ4 і стали Р6М5фз.
Метою роботи є спроектувати систему автоматичного управління положенням електрода при виправленні алмазного круга електроерозійним способом, за рахунок керування процесом обліку видів одиничних імпульсів, висновку їх на екран РКІ і видачі визначеної серії імпульсів на кроковий двигун за підсумками підрахунку круговькості видів імпульсів.
1. ПРОФІЛЮВАННЯ АЛМАЗНИХ СТРУМОПРОВІДНИХ Кругов СПОСОБОМ ТЕПЛОВОГО ВПЛИВУ (ЕЛЕКТРОЕРОЗІЙНИМ МЕТОДОМ)
Застосування електроерозійної обробки для профілювання алмазних струмопровідних кругов є досить перспективним. Це порозумівається декруговькома специфічними особливостями, властивому даному методові: наявністю міжелектродного зазору, вибірковістю процесу і минаючих розрядів, полярним ефектом і ін. Перші результати, що підтвердили ці припущення, були отримані в 1965 р. лабораторією правлячих інструментів ВНІІАЛМАЗа. З цього часу були проведені широкі експериментальні і теоретичні дослідження, що підтвердили доцільність застосування електроерозійної обробки при профілюванні алмазних струмопровідних кругов.
При профілюванні алмазних струмопровідних кругов способом теплового впливу виникає питання про якість виправлення, унаслідок цього круг може бути не готово до подальшої роботи, хоча його «очищення» було вже проведене. Відомо, що при цьому методі виникають різні види імпульсів: холості, робочі, фіктивні і короткого замикання. Вид імпульсів залежить від величини міжелектродного проміжку і визначає продуктивність електроерозійного видалення оброблюваного матеріалу. Розглянемо залежність МЕП на види імпульсів і продуктивність ЕЕО на прикладі рис.1.1.
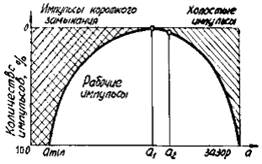
Рисунок 1.1 - Вплив міжелектродного зазору на види імпульсів
Як видно з приведеного графіка, у міру збільшення зазору від  зменшується число імпульсів КЗ і росте продуктивність обробки. Існує єдина точка, що відповідає зазорові
зменшується число імпульсів КЗ і росте продуктивність обробки. Існує єдина точка, що відповідає зазорові  , у якій через МЕП проходить 100% робочих імпульсів і, якби при 100%-ном використанні імпульсів, можливому тільки при високій концентрації продуктів ерозії, не зникала і «евакуаційна здатність» МЕП, цій точці повинна була б відповідати і максимальна продуктивність. Однак, унаслідок того, що при 100%-ном використанні імпульсів можливе виникнення коливального режиму сервопривода, максимальна швидкість знімання відповідає 5-10% холостих імпульсів при відсутності імпульсів КЗ. При подальшому збільшенні зазору
, у якій через МЕП проходить 100% робочих імпульсів і, якби при 100%-ном використанні імпульсів, можливому тільки при високій концентрації продуктів ерозії, не зникала і «евакуаційна здатність» МЕП, цій точці повинна була б відповідати і максимальна продуктивність. Однак, унаслідок того, що при 100%-ном використанні імпульсів можливе виникнення коливального режиму сервопривода, максимальна швидкість знімання відповідає 5-10% холостих імпульсів при відсутності імпульсів КЗ. При подальшому збільшенні зазору  , коли круговькість холостих імпульсів перевищує 5-10%, продуктивність починає падати. Таким чином, здійснюючи управління процесом ЕЕО з урахуванням видів одиничних імпульсів, можна, через універсальність методу, значною мірою зменшити трудомісткість пошуку режимів, що забезпечує максимальну продуктивність електроерозійної обробки. Завдання полягає в тім, щоб розподілити одержувані імпульси на типи і зробити висновок про поточний процес виправлення алмазного круга. Імпульси короткого замикання повинні майже відсутствувати, а холостого ходу – не більш 10%. Якщо отримані дані не відповідають установленим критеріям, треба змінити зазор між електродом і поверхнею алмазного круга, щоб одержати оптимальний режим виправлення, що відповідає нашим критеріям.
, коли круговькість холостих імпульсів перевищує 5-10%, продуктивність починає падати. Таким чином, здійснюючи управління процесом ЕЕО з урахуванням видів одиничних імпульсів, можна, через універсальність методу, значною мірою зменшити трудомісткість пошуку режимів, що забезпечує максимальну продуктивність електроерозійної обробки. Завдання полягає в тім, щоб розподілити одержувані імпульси на типи і зробити висновок про поточний процес виправлення алмазного круга. Імпульси короткого замикання повинні майже відсутствувати, а холостого ходу – не більш 10%. Якщо отримані дані не відповідають установленим критеріям, треба змінити зазор між електродом і поверхнею алмазного круга, щоб одержати оптимальний режим виправлення, що відповідає нашим критеріям.
1.1 Фізичні основи електроерозійної обробки алмазного шару
Оскруговьки алмазоносний шар струмопровідного шліфувального круга складається з двох різнорідних матеріалів — струмопровідного зв'язування і не струмопровідних алмазних зерен і наповнювача, процеси, що протікають на електродах, у розглянутій обробці будуть мати специфічні особливості, відмінні від електроерозійної обробки звичайних матеріалів. Передбачається наступний механізм обробки алмазоносного шару. При зближенні алмазного круга (рис. 1.2) з електродом-інструментом до розрядної відстані по найкоротшому шляху між струмопровідними ділянками їхніх поверхонь виникають імпульсні розряди, сумарний вплив яких приводить до ерозії струмопровідних компонентів алмазоносного шару (металевого зв'язування). Паралельно з ерозією зв'язування відбувається оголення алмазних зерен, що, входячи в контакт з електродом-інструментом, випадають при критичному закріпленні їх у зв'язуванні круга. Отже, процес електроерозійної обробки алмазоносного шару складається з ерозійного руйнування зв'язування і механічного видалення алмазних зерен. Інтенсивність знімання алмазоносного шару круга Q у такому випадку може бути визначена:
Q=(Vc+Vз)*τ, (1.1)
де Vc. — обсяг зв'язування, що видаляється; Vз - обсяг зерен, що видаляються; τ — час обробки.
У сталому режимі лінійні швидкості видалення алмазних зерен і зв'язування рівні між собою, отже, алмазоносный шар, що знімається за час обробки, може бути визначений через обсяг зв'язування, що видаляється:
Q=k*Vс*τ, (1.2)
де k — коефіцієнт, що враховує об'ємний зміст у зв'язуванні алмазних зерен.
|
|
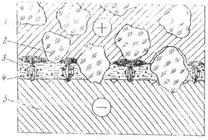
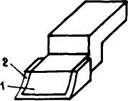
1 – зв'язування алмазного шару; 2 – алмазні зерна; 3 – розряди; 4 – міжелектродне середовище; 5 – електрод-інструмент
Рисунок 1.2 - Схема процесу електроерозійної обробки струмопровідного шару.
При профілюванні алмазних кругов важливий і зворотний процес — знос електрода-інструмента, що, так само як і обробка алмазоносного шару, відбувається в результаті електроерозійних і механічних процесів. Електроерозійні процеси характеризуються ерозією матеріалу електрода-інструмента при впливі імпульсних розрядів, а механічні — зносом електрода-інструмента в результаті контакту з ним алмазних зерен.
Отже, при даній обробці алмазних струмопровідних кругов па обох електродах протікають два процеси: електроерозійний, і механічний.
Основу електроерозійних процесів складає ефект ерозії металу в імпульсному електричному розряді. Більшість експериментальних і теоретичних досліджень, проведених у нашій країні і за рубежем, визначають електротермічну природу електричної ерозії, основні положення якої полягають у наступному. При підведенні напруги до електродів у міжелектродному проміжку виникає електричне поле з найбільшою напруженістю в напрямку, що проходить через близько розташовані ділянки на поверхні електродів. При визначеному критичному напруженні пробою порушується діелектрична міцність середовища й утвориться іонізований канал наскрізної провідності. У його утворенні беруть участь диспергированні провідні частки, що знаходяться в міжелектродній рідини і, що втягуються частково в зону розряду уздовж силових ліній електричного поля. Після утворення предразрядного каналу, що з'єднує обидва електроди, починає формуватися основний розрядний канал, при утворенні якого відбувається додаткова іонізація проміжку, що призводить до розширення каналу розряду. По цьому каналі спрямовується електрична енергія у виді імпульсного розряду. Завдяки високій концентрації енергії в зоні розряду розвивається висока температура, що перетвориться на електродах в об'ємні і поверхневі теплові джерела. Виникаючі в результаті ефекту Джоуля-Ленца і при передачі тепла безпосередньо з каналу розряду, ці джерела нагрівають ділянки електродів, що знаходяться в зоні розряду, до високих температур, достатніх для розплавлювання і часткового випару металу.
Природа евакуації розплавленого металу трактується різними авторами по-різному. Ряд гіпотез пояснює евакуацію металу електродинамічними силами, скипанням розчиненого в металі газу, мікроскопічними неоднорідністями, що завжди є в металі і різних властивостях, що володіють, і іншими явищами. Так чи інакше, метал видаляється з локальних поверхонь електродів, застигаючи в навколишнім середовищі у виді дрібних часток, а на поверхні електродів утворяться лунки визначеного розміру і форми. Після розряду протягом деякого часу відбувається деіонизація проміжку (відновлення електричної міцності), і далі через визначений період процес повторюється між іншими прилеглими ділянками електродів. Виходячи з цього, обсяг зв'язування, що видаляється з алмазного круга, може бути виражений через суму обсягів, що видаляються від дії одиночних розрядів:
Vc=∑Vi. (1.3)
Дане співвідношення справедливе при збереженні аддитивности процесу, при якому дія одного розряду не накладається на дію наступного. Підставляючи дане співвідношення у вираження (1), одержуємо рівняння, що характеризує інтенсивність знімання алмазоносного шаруючи:
Q=(1+Vз/Vc)ΣVi*τ, (1.4)
де Vi — обсяг зв'язування, що видаляється в i-м розряді.
При обробці алмазоносного шару обсяг зв'язування, що видаляється, в одиничному імпульсному розряді залежить також 
 від ступеня розміщення лунок і зв'язуванню між алмазними зернами. Відповідність цих параметрів впливає не тільки на розвиток лунок, але і на якість алмазних зерен, що знаходяться поблизу розряду.
від ступеня розміщення лунок і зв'язуванню між алмазними зернами. Відповідність цих параметрів впливає не тільки на розвиток лунок, але і на якість алмазних зерен, що знаходяться поблизу розряду.
Механічні процеси протікають на електродах у випадку, якщо величина міжелектродного зазору порівнянна з розміром алмазних зерен, і виявляються у видаленні алмазних зерен у міру їхнього оголення зі зв'язування круга й у механічному зносі електрода-інструмента від дії з ним алмазних зерен. Обидва ці процесу взаємозалежні і залежать від розмірів алмазних зерен і міцності їхнього закріплення в зв'язуванні шліфувального круга, а також від величини зазору, що утвориться між електродами. Виступаюче зі зв'язування алмазне зерно в процесі оголення входить у контакт з електродом-інструментом, залишаючи на її поверхні слід з розмірами, що відповідають глибині врізання. У свою чергу зусилля, що виникають при контакті алмазного зерна, утворять у місцях його закріплення критичні напруження, що приводять до вирву алмазного зерна зі зв'язування круга.
Механічні процеси дуже впливають на параметри спрофілюючого круга. Так, у процесі видалення алмазних зерен формується мікропрофіль поверхні, що ріже, що згодом характеризує точність, що ріже здатність і стійкість круга.
2 Сучасні методи електроерозійної обробки при шліфуванні твердих матеріалів
У процесі виправлення усувається погрішність установки шліфувального круга на фланці і закріплення останніх на шпинделі верстата, надається кругу задана геометрична форма, формується необхідний мікропрофіль робочої поверхні, що полягає в забезпеченні необхідної величини виступання алмазних зерен зі зв'язування.
Таким чином, безпосередньо на стадії виправлення закладають визначені показники працездатності круга і якості обробки. Час, затрачуваний на виправлення, збільшує собівартість шліфувальної операції, тому видалення зв'язування й алмазоносного шару в процесі виправлення необхідно здійснювати з максимальною продуктивністю.
Існуючі методи виправлення алмазних кругов на металевих зв'язуваннях по способі впливу на алмазоносний шар можна підрозділити на механічні, хімічні, теплові і комбіновані.
Механічні методи засновані на видаленні зв'язування і сколювання зерен шляхом абразивної обробки. Виправлення алмазних кругов на металевому зв'язуванні абразивними кругами по методу шліфування забезпечує продуктивність до 265 мм3 /хв і має наступні недоліки:
- згладжування робочої поверхні ( виступання зерен, що ріжуть, над зв'язуванням не перевищує 5-10 % розміру зерна ), що приводить до погіршення якості обробленої поверхні і низкою здатності, що ріже, круга
- часткове руйнування зерен, удавлення зерен у зв'язування, розворот зерен у напрямку вектора швидкості виправлення, виривши зерен зі зв'язування;
- висока величина зносу абразивного круга, що складає 1000 %.
Для поліпшення виступання зерен зі зв'язування при виправленні механічним способом пропонується використовувати чашковий інструмент із матеріалу GC 1207V, який містить алмазні зерна. У процесі виправлення алмазні зерна відриваються від правлячого інструмента і, потрапляючи в зазор між зв'язуванням круга і матеріалом правлячого інструмента, за рахунок ефекту притирання інтенсифікують видалення зв'язування навколо алмазних зерен шліфувального круга. Регулювання інтенсивності видалення зв'язування здійснюється зміною потоку СОЖ, а також розміром зерен у правлячому інструменті. Виправлення вільним абразивом, подаваним у зазор між притиранням і поверхнею обертового круга, дозволяє збільшити продуктивність виправлення, забезпечити виступання зерен, що ріжуть, над зв'язуванням, але вимагає модернізації устаткування, готування спеціальних суспензій і використовується в основному для кругов простої форми.
Електрохімічний метод виправлення застосовується досить обмежено, хоча за дослідженнями В.Д. Дорофеєва і Т.В. Тудоскі характеризується високою продуктивністю ( до 1000 мм3/хв ), мінімальним зносом правлячого електрода-інструмента і відсутністю шкідливих побічних впливів на зерна алмаза. Разом з тим, вибірковість процесу вимагає для кожного зв'язування підбор відповідного електроліту, створює труднощі при виправленні на верстатах, що працюють зі звичайної СОЖ, тому що потрібні додаткові системи подачі електроліту і резервуарів для його збереження, не дозволяє забезпечити точність профілю, не усуває биття круга.
Сполучення електрохімічного методу з механічним впливом на зв'язування і зерна дозволяє підвищити продуктивність виправлення і точність профілю круга, довести продуктивність видалення алмазоносного шару при виправленні велико-зернистих кругов до 500 мм3/хв.
Існуючі способи електроерозійного виправлення ЕЕП шліфувальних кругов по способі ініціювання електричних розрядів можна розділити на двох груп: способи безконтактно- і контактно-ерозійного впливу.
У першому випадку, як і при електроерозійній обробці ( ЕЕО ) металів, пробій міжелектродного проміжку (МЕП) відбувається в результаті скипання окремих ділянок рідини і злиття їхній у суцільний канал, а також утворення струмопровідних містків унаслідок перерозподілу твердих металевих включень у рідині (рис. 2.1). При цьому як джерела технологічного струму використовуються генератори типу ВГ-ЗВ, ШГІ, МГІ, а робітничим середовищем є олія, гас і інші органічні рідини.
Електроерозійний метод виправлення має визначені переваги перед іншими методами, обумовлені його специфічними особливостями. Так, наявність зазору між взаємодіючими поверхнями круга й електрода дозволяє здійснювати безконтактне формоутворення з мінімальним зусиллям і зносом правлячого інструмента; вибірковість і дискретність процесу забезпечує необхідну точність обробки і якість поверхні, що ріже; термічний характер електричної ерозії не ставить даний метод у залежність від фізико-хімічних властивостей абразивомістящого матеріалу; кожне абразивне зерно після виправлення оточено зв'язуванням зі зміненою структурою, що має твердість у 1,3-3 рази більшої, ніж твердість подібної структури; термохімічний вплив ерозії так зерна приводить до утворення на зернах ямок і ступіней, що є додатковими крайками, що ріжуть; після електроерозійного виправлення зерна виступають зі зв'язування на 30-45 мкм, що створює більш розвиту поверхню круга і забезпечує здатність круга, що ріже, у 2,5-3 рази вище, ніж після абразивного виправлення. Електроерозійний метод виправлення забезпечує високу продуктивність (від 100 мм3/хв при чистових і до 1000 мм3/хв при чорнових режимах обробки), порівняно високу точність профілю в межах 5-20 мкм і підвищені властивості рельєфу, що ріжуть.
Недоліками електроерозійного методу виправлення є часткова графітизація алмазних зерен під впливом високих температур при розрядах, необхідність модернізації універсального устаткування або застосування спеціальних установок для виправлення, у зв'язку з тим, що механічні режими виправлення відрізняються від режимів звичайного шліфування.
В другому випадку при контактно-ерозійному способі впливу електричні розряди ініціюються або в результаті наявності ковзного контактування мікронерівностей поверхонь електродів, або при стружечному замиканні електродів з наступним порушенням електричних розрядів ( рис. 2.2 ). У цьому случаї як джерела технологічного струму використовуються генератори типу ІТТ, джерела постійного струму. Технологічним середовищем є, як правило, звичайна шліфувальна СОЖ. Електроерозійне виправлення алмазних кругов на металевих зв'язуваннях методом шліфування електрода при використанні водних розчинів СОЖ забезпечують продуктивність виправлення 200 мм3/хв, збільшення в 2,5 рази здатності, що ріже, у порівнянні з абразивним виправленням.
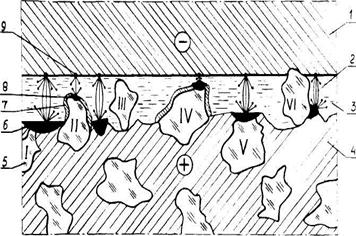
1 - електрод; 2 - канал розряду; 3 - міжелектродне середовище; 4 - зв'язування; 5 - зерно; 6 - ерозія зв'язування; 7 - графітова плівка; 8 - ерозія зерна; 9 - ерозія матеріалу електрода
Рисунок 2.1 - Схема процесу електроерозійної обробки струмопровідного абразивомістящого шару
1 - електрод; 2- середовище; 3 - зерно; 4 - алмазно-абразивний інструмент; 5 - стружка; 6 - мікродуговий розряд
Рисунок 2.2 - Схема виправлення від джерела постійного струму
За рахунок електроерозійного виправлення на кругах зернистості 100/80 - 250/200 може бути досягнутий різновид рельєфу 20— 90 мкм, відхилення від прямолінійності профілю 10-20 мкм, а відхилення від округлості 8-32 мкм.
Таким чином, обидва способи електроерозійного виправлення шліфувальних кругов відрізняються лише способом ініціювання електричних розрядів, засновані на руйнуванні металевого зв'язування електричними розрядами і по фізичній суті аналогічні ЕЕО металів. Тому спочатку проаналізуємо можливі шляхи інтенсифікації ЕЕО.
Відомо, що при ЕЕО виникають різні виду імпульсів; холості, робочі, фіктивні і короткі замикання (КЗ). Вид імпульсів залежить від величини міжелектродного проміжку і визначає продуктивність електроерозійного видалення оброблюваного матеріалу. Розглянемо вплив величини МЕП на види імпульсів і продуктивність електроерозійної обробки на прикладі рис. 1.1, побудованого за даними роботи Б.Г. Гутніна.
 |
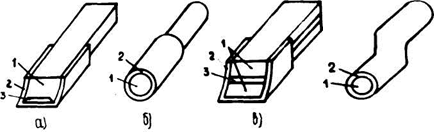 |
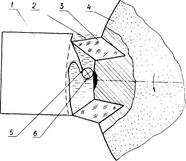
1 - електрод; 2 - ізоляційне покриття; 3 - канал для підведення СОЖ
Рисунок 1.4 - Електроди-інструменти для профілювання поверхні (виправлення) по методу обгинаючої поверхні алмазного круга
Як видно з приведених графіка, у міру збільшення зазору від Qmin зменшується число імпульсів КЗ і росте продуктивність обробки. Існує єдина крапка, що відповідає зазорові α1, у якій через МЕП проходить 100 % робочих імпульсів і, якби при 100%-ном використанні імпульсів, можливому тільки при високій концентрації продуктів ерозії, не зникала і " здатність, що евакуює," МЕП, цій крапці повинна була б відповідати і максимальна продуктивність. Однак, унаслідок того, що при 100%-ном використанні імпульсів можливе виникнення коливального режиму сервопривода, максимальна швидкість знімання відповідає 5-10 % холостих імпульсів при відсутності імпульсів КЗ. При подальшому збільшенні зазору а>а2, коли круговькість холостих імпульсів перевищує 5-10 %, продуктивність починає падати.
Таким чином, здійснюючи керування процесом ЕЕО з урахуванням видів одиничних імпульсів, можна, через універсальність методу, значною мірою зменшити трудомісткість пошуку режимів, що забезпечують максимальну продуктивність електроерозійної обробки.
Останнім часом запропоновані різні системи автоматичного регулювання процесу ЕЕО, засновані:
- на коефіцієнті використання імпульсів;
- на функції процентного вмісту імпульсів КЗ або залежності співвідношення робочих і аномальних розрядів;
Крім того, відомі способи керування абразивно-електроерозійною обробкою з використанням імпульсів КЗ.
Разом з тим, використовувати відомі способи керування ЕЕО з урахуванням видів імпульсів для керування процесом електроерозійного виправлення шліфувальних кругов не представляється можливим через наступні особливості електроерозійного виправлення:
- при виправленні анодом служить алмазоносний шар, що має неоднорідну структуру - струмонепроводні алмазні зерна розташовані в струмопровідному зв'язуванні; при ЕЕО оброблюваний матеріал представляє однорідну структуру;
- продуктивність виправлення визначається як інтенсивність електроерозійного видалення зв'язування, так і механічного руйнування зерен; при ЕЕО продуктивність обумовлена тільки електроерозійними процесами;
- при виправленні відбувається зшліфовання матеріалу катода алмазними зернами, що перешкоджають зменшенню МЕП, у той же час при ЕЕО можливо зменшення зазору аж до зіткнення поверхні електродів.
На продуктивність ЕЕО впливають властивості технологічного середовища і матеріал електрода, площа обробки, вихідна потужність джерела технологічного струму.
3 Методика реєстрації одиничних імпульсів і їх класифікація
При дослідженні взаємозв'язку видів одиничних імпульсів з механічними режимами електроерозійного виправлення і продуктивністю видалення алмазоносного шару запис одиничних імпульсів струму і напруги здійснювали за допомогою осцилографа Н115 (рис.3.1). Для цієї мети послідовно до гальванометрів осцилографа були підключені додаткові опори: R1 = 30 Ом, R2 = 470 Ом, R3 = 100 Ом - до гальванометра для запису імпульсів струму; R4 = 47 кому і R5 = 5 кОм - до гальванометра для запису імпульсів напруги.
Для виміру інтегральних електричних характеристик процесу електроерозійного виправлення Іср і Ucp використовувалися додаткові амперметри РА1 (0-25 А), РА2 (0-5 А) і вольт-метр PV1 (0-12 В). Підключення приладів і гальванометрів осциллографа G1 до G2 здійснювалося за приведеною схемою (рис. 3.1). Запис здійснювався на осцилографічний фотопапір MC-2-135, швидкість протягання 5000 мм/с.
Записані одиничні імпульси візуально класифікували на чотири види: холості, робочі, імпульси часткового короткого замикання (ЧКЗ) і короткого замикання (КЗ) (рис. 3.2,а,б,у, г), керуючись їхніми визначеннями, приведеними в ДСТ 25331-82, а також у посібнику з експлуатації до блоків харчування ІТТ-35 і ІТТ-9 до алмазно-ерозійних верстатів.
У процесі електроерозійного виправлення робітниче середовище ( 0,3%-ный водний розчин кальцинованої соди ) являє собою слабкий електроліт, а при виникненні механічного контакту між зв'язуванням круга і поверхнею електрода-інструмента відбувається їхнє відносне переміщення зі швидкістю 30-35 м/с. Тому для уточнення форми неодружених імпульсів і імпульсів короткого замикання були проведені спеціальні експерименти.
Перед записом імпульсів неодруженого ходу поверхня ЕІ шліфувалася без подачі на врізання до припинення електричних розрядів. Після цього, не припиняючи обертання шліфувального круга і подачі робітничого середовища, записували імпульси. В описаних умовах неодружений імпульс характеризувався проходженням струму малої амплітуди і відсутністю "підсадження" у вершини імпульсу напруги ( рис. 3.2,а )
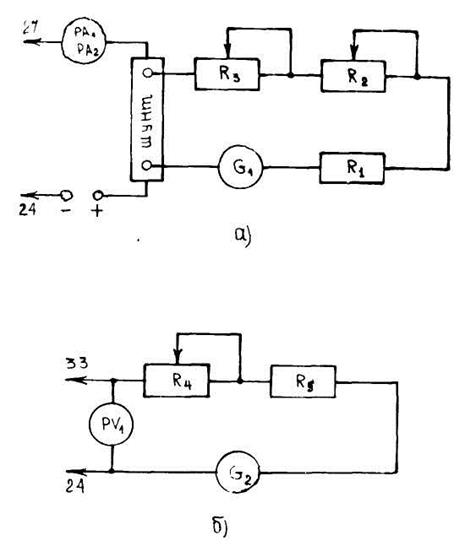
а - підключення гальванометрів для запису імпульсів струму й амперметрів;
б - підключення гальванометрів для запису імпульсів напруги і вольтметра
Рисунок 3.1 - Схема підключення гальванометрів осцилографа Н115 і приладів
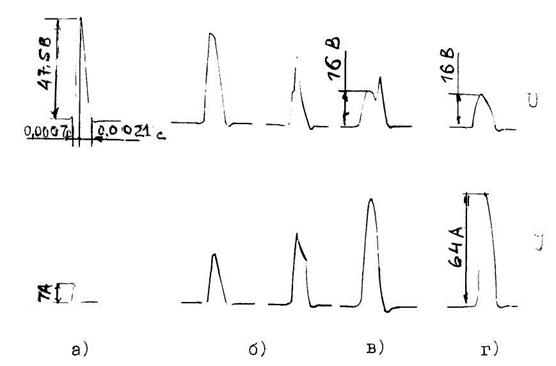 |
а) холості; б) робочі; в) часткового короткого замикання; г)короткого замикання
Рисунок 3.2 - Види одиничних імпульсів при виправленні круга в середовищі слабкого електроліту
Імпульси короткого замикання записували при шліфуванні електрода навкруги, на поверхні якого зерна були закриті зв'язуванням. У цьому випадку імпульс КЗ характеризується високим значенням струму і низькою напругою, причому імпульс напруги має характерну закруглену форму ( рис. 3.2,г).
Робочі імпульси при ЕЕП у залежності від умов стружечного замикання мають різну форму й амплітуди струму і напруги ( рис. 3.2,б), а імпульси ЧКЗ характеризуються дробленням імпульсу напруги і високих значень величини струму ( рис. 3.2,в). Дроблення імпульсу напруги говорить про те, що наявне під час імпульсу ЧКЗ коротке замикання ліквідується за час дії цього ж імпульсу.
Після класифікації видів одиничних імпульсів, записаних при проведенні експериментів, визначалася їхня круговькість по видах, якою і характеризувався досліджуваний режим виправлення.
Цей процес, як ми бачимо, дуже трудомісткий і вимагає багато часу, щоб одержати інформацію про якість проведеного виправлення. Потрібно автоматизувати цей процес з наступним висновком результатів на екран рідкокристалічного індикатора. Так само буде здійснюватися управління електродом у залежності від інформації про проведене виправлення.
4 Розробка функціональної схеми для системи автоматичного керуванняположенням електрода при виправленні алмазного круга
Розроблена функціональна схема приведена на рис 4.1 : К – компаратори, Т – RS-тригери, БОН – блок опорних напруг, МК – мікроконтролер, РКІ – рідкокристалічний індикатор.
Для безпеки нашої системи від небажаного перепаду напруги або збільшення струму ми підключаємося до вольтметра, що показує присутність імпульсів між електродом і алмазним кругом. При натисканні на кнопку на кнопку «ПУСК» на клавіатурі МК усі лічильники обнуляются, і система автоматичного контролю починає свою роботу.
Вхідний сигнал знімається між електродом і алмазним кругом. Ця імпульсна напруга подається на вхід кожного з 3-х компараторів. На інший вхід компаратора подається постійна напруга 15В, 30В и 45В, щоб порівнювати вхідний імпульс з наявним сигналом і розподілити імпульси по типах. Якщо вхідний імпульс перевищує 45В, значить це імпульс неодруженого ходу, більш 30В – робочий імпульс, більш 15В – імпульс короткого замикання.
RS тригери, формувач дозволу рахунка і скидання тригерів і шифратор забезпечують почергове зчитування імпульсів, при влученні сигналів на входи S тригерів з компараторів ми одержуємо визначену логічну комбінацію на виході, що враховуємо за допомогою шифратора.
Шифратор, одержавши визначену логічну комбінацію, дозволяє нам розподілити імпульси по видах і передати них у МК для подальшої обробки. За допомогою МК і розробленого програмного забезпечення обробляється результат і виводиться на екран РКІ.
МК при одержанні імпульсів у круговькості 999 зупиняє прийом і починає обробку результатів. Він розраховує процентний уміст кожного виду імпульсів від загального числа, порівнює отриманий результат з нашим обраним критерієм оптимального виправлення. Після порівняння, якщо в нас є відхилення від нашого критерію, програмне забезпечення прораховує на скруговькох потрібно зрушити електрод, щоб одержати оптимальне виправлення і видає серію імпульсів на кроковий двигун, що і керує електродом. Це дуже полегшить задачу оператора верстата і за мінімальні терміни буде проведене якісне виправлення алмазного круга електроерозійним методом.
 | |||
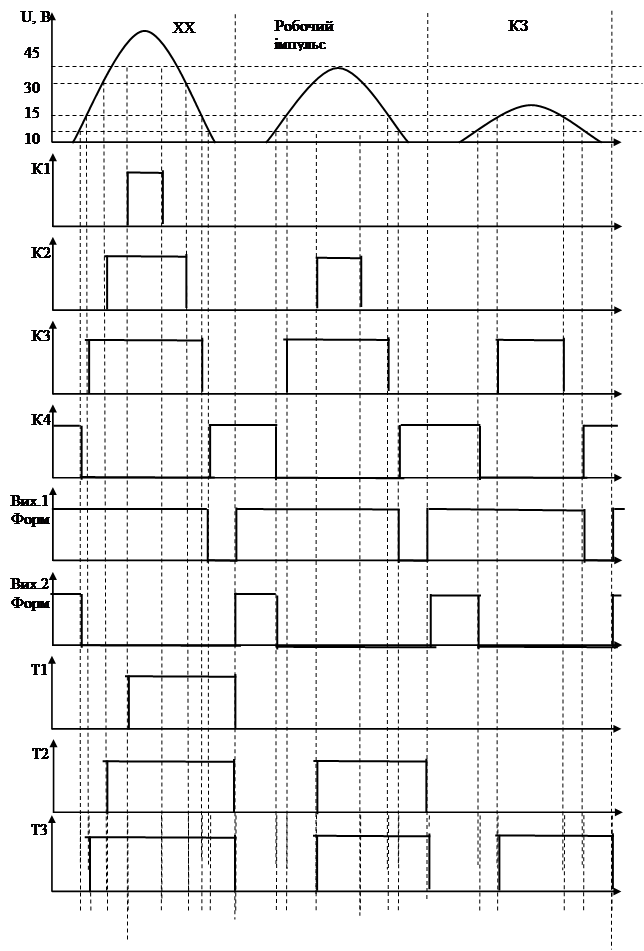 | |||
Рисунок 4.2 – Часова діаграмма роботи тригеров, компараторів і формувача
На рис 4.2 представлена часова діаграма роботи елементів логіки і формувача дозволу рахунка і скидання тригерів і їхнє поводження щодо різних видів імпульсів: ХХ – імпульс холостого ходу, Робочий імпульс, КЗ – імпульс короткого замикання. На виходах тригерів ми одержуємо визначений логічний результат, що подається на шифратор. Складемо таблицю логічних результатів для шифратора. Позначимо виходи з тригерів: Т1 – x1, Т2 – x2, Т3 – x3, а виходи із шифратора: y1, y2, y3, y4. y1 – присутність імпульсу або загальні імпульси, вона завжди буде дорівнює «1» при наявності імпульсу.
Таблиця 4.1 - Логічні результати дешифрувача
| Виходи триггеров | Виходи дешифрувача | Вид імпульса | |||||
| X1 | X2 | X3 | Y1 | Y2 | Y3 | Y4 | |
| 1 | 1 | 1 | 1 | 0 | 0 | 1 | ХХ |
| 1 | 1 | 0 | 1 | 0 | 1 | 0 | Рабочий |
| 1 | 0 | 0 | 1 | 1 | 0 | 0 | КЗ |
Таким чином, одержуем код на виході дешифрувача, який подаєм на МК.
5. Технічна реалізація
Для виділення імпульсів різної амплітуди буде потрібно трансформатор, що давав з перемінної напруги 220 В и частотою 50 Гц ~ 9 В.
5.1 Розрахунок ланки імітації імпульсів різної амплітуди
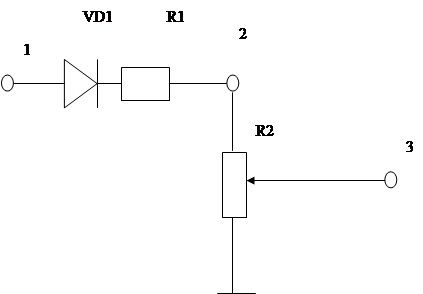
Рисунок 5.1 – Ланка імітації імпульсів різної амплітуди
На вхід 1 із трансформатора подається імпульсна напруга рівне  В, у крапці 2 нам потрібно одержати напругу 1 В. Значить напруга на резисторі R1=12 В, а на R2=1 В. Для цього нам підійде діод 2Д509А, у нього номінальний струм Iном = 0,1 А. Розрахуємо необхідний нам струм для резисторів:
В, у крапці 2 нам потрібно одержати напругу 1 В. Значить напруга на резисторі R1=12 В, а на R2=1 В. Для цього нам підійде діод 2Д509А, у нього номінальний струм Iном = 0,1 А. Розрахуємо необхідний нам струм для резисторів:
 ,(5.1)
,(5.1)
Отже:
 ;(5.2)
;(5.2)
 . (5.3)
. (5.3)
Вихід 3 міняється в межах від 0.. 1 В и подається на всі позитивні входи трьох компараторів. На четвертий компаратор подається на негативний вхід, тому що для формувача нам потрібний інвертований сигнал.
 5.2 Розрахунок блоку опорних напруг
5.2 Розрахунок блоку опорних напруг
|
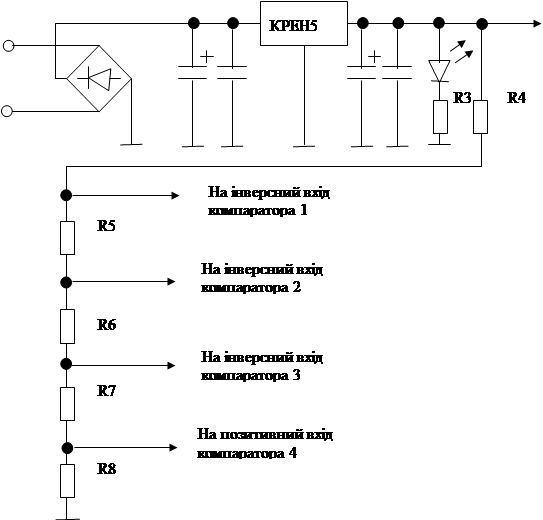
Рисунок 5.2 – Блок опорних напруг
Опорні напруги потрібні для постійної напруги, щоб їхня амплітуда була постійної, інакше одержимо помилкову інформацію про імпульси на виході. Щоб згладити імпульсна напруга потрібний діодний міст. Виберемо діодний міст КЦ 407:
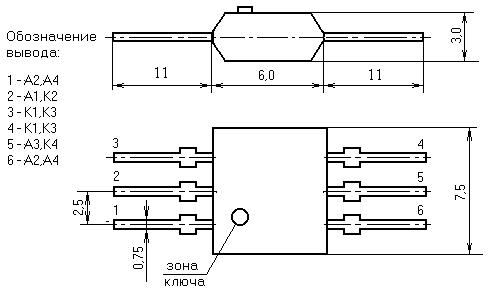
Рисунок 5.3 – КЦ 407
У нього параметри Iпр мах=0,5 А и Iпр і мах=2 А.
Але діоди тільки зменшують амплітуду, а не встановлюють неї на постійний рівень. Значить знадобитися ще випрямувач напруги, щоб на виході вийшов сигнал рівний +5 В постійної напруги і для його підживлення потрібні конденсатори номіналом 220 мкф*45 В и 100 пф.
Виберемо випрямувач КРЕН5А, що дозволить нам одержати на виході +5 В постійної напруги.
Для індикації харчування нам буде потрібно світлодіод з резистором.
Підійде будь-який світлодіод, тільки щоб номінальний струм світлодіода був дорівнює 
 , отже можна розрахувати номінал резистора R3, знаючи що на діоді упаде 2,5 В:
, отже можна розрахувати номінал резистора R3, знаючи що на діоді упаде 2,5 В:
 . (5.4)
. (5.4)
Установимо межі опорної напруги для компараторів:
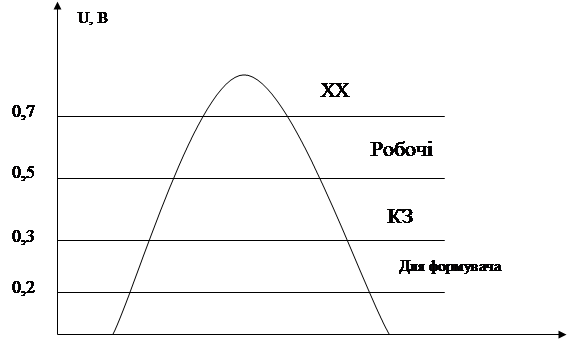 |
Рисунок 5.3 – Межі опорної напруги
Щоб одержати обрані межі опорної напруги потрібно поставити дільники з резисторів визначеного опору.
Нехай сумарний опір дільника буде дорівнює 70 кОм, тоді розрахуємо струм для дільника:
 . (5.5)
. (5.5)
Тепер маючи струм для дільника і межі напруги для кожного входу компаратора, значить можна розрахувати резистори. Почнемо з R8:
 . (5.6)
. (5.6)
Виберемо номінал опору R8 рівний 2 кОм.
Розрахуємо R7:
 . (5.7)
. (5.7)
Виберемо номінал опору R7 рівний :
 . (5.8)
. (5.8)
Розрахуємо R6:
 . (5.9)
. (5.9)
Розрахуємо R5:
 . (5.10)
. (5.10)
Розрахуємо R4:
 . (5.11)
. (5.11)
5.3 Вибір компараторів
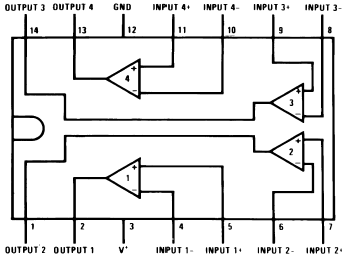
Рисунок 5.4 – Чотири компаратори в одній схемі LM339N
Три компаратори служать для розподілу сигналу, четвертий потрібний для формувача, що описан нижче.
Сигнал, що подається на позитивний вхід компаратора, порівнюваний з еталонним, котрий подається з блоку опорних напруг, і якщо він більше по напрузі еталонного, тоді на виході маємо логічну одиницю, тобто +5 В, як показано на рис 5.5.
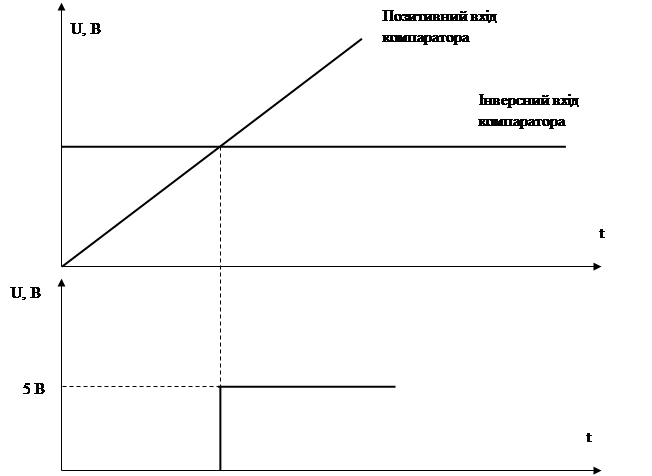 Рисунок 5.5 – Часова діаграма роботи компаратора
Рисунок 5.5 – Часова діаграма роботи компаратора
Таким чином, на виходах компараторах маємо визначений код з логічних нулів і одиниць, що подається на тригери.
5.4 Вибір тригерів і принцип їхньої роботи
Скористаємося мікросхемами КМОП. Серед них присутні усі види тригерів: RS, D і JK.
Виберемо мікросхему ДО561ТР2, що містить чотири RS-тригери (DD1.1 – DD1.4), що дуже зручно при нагромадженні 4-х розрядних двоїчних слів. Виходи кожної засувки мають третій Z-стан. Сигнал дозволу - загальний для четвірки тригерів подається на вхід EI. Якщо на цьому вході нульовий рівень, виходи розмикаються (переходять у Z-стан).
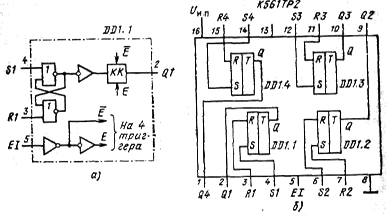 |
а - схема однієї RS-засувки з входом дозволу EI; б – цоколівка
Рисунок 5.6 – Мікросхема ДО561ТР2
Кожен тригер складається з RS-засувки (два інвертори ИЛИ-НІ), інвертора і ключа комутації КК, що керується від шин Е и Е-НІ, що поєднують усі чотири канали. Тригер має два входи даних R і S. Усі стани триггерного каналу зведені в табл. 5.2. Низькі рівні на входах S і R не змінюють стан виходу Q. Якщо S=l і R=l, тригер цю інформацію не засувуваїть, але на виході Q транслюється сигнал S=l (поки він присутній). Час затримки поширення сигналу для тригера ДО561ТР2 не перевищує 200 нс, час переходу до стану Z не більш 100 нс.
Застосування RS-засувок дозволяє усунути наслідку дребезга, що виникає при переключенні контакту S1, тобто можливі помилкові імпульси запису одиниці в логічний пристрій. Застосувавши RS-тригер і двухполярний перемикач S1, одержимо на виході гарантований єдиний імпульс запису.
Таблиця 5.2 – Усі стани триггерного каналу
| Вхід | Виходи Qn | ||
| EI | Sn | Rn | |
| H | x | x | Z |
| B | B | H | B |
| B | H | B | H |
| B | B | B | QSB |
| B | H | H | Не міняється |
Нам знадобиться тільки три тригери з цієї мікросхеми, тому що в нас три виходи з компараторів. Усі три виходи тригерів підключені до дешифрувача.
 5.5 Проектування формувача скидання тригерів і дозволу рахунка
5.5 Проектування формувача скидання тригерів і дозволу рахунка
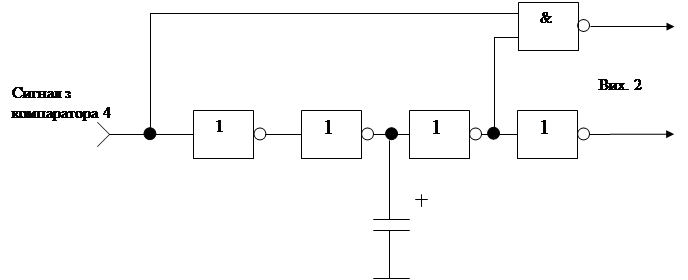
Рисунок 5.7 – Схема формувача
Часова діаграма даного формувача представлена на рис 5.8.
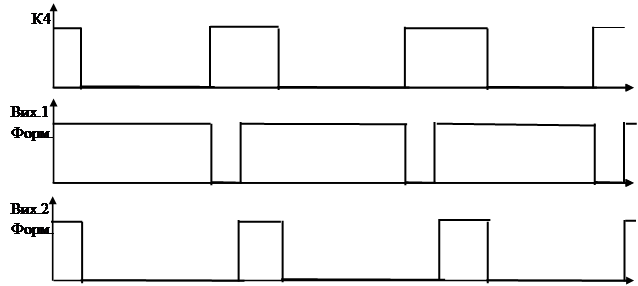
Рисунок 5.8 – Тимчасові діаграми роботи формувача
У цій схемі використовували мікросхему КМОП логіки ДО561ЛН1, що містить у собі шість стробуючих інверторів (рис. 5.9). Кожен інвертор (точніше, двухвхідный елемент АБО-НІ) має вхід Dn і вихід Qn. Крім того, на другі виходи всіх шести інверторів від загального висновку 12 (дозвіл по входу EI) подається сигнал, що дозволяє, з активним низьким рівнем. Якщо тут вхідний рівень високий, входи Dn забороняються, а усі виходи Qn мають низький вихідний сигнал.
Другий загальний вхід керування E0 – дозвіл по виходу при високому вхідному рівні переводить усі висновки в стан Z (тобто розімкнуто; вихідний опір більш 10 МОм). Третій стан спрощує роботу виходів інверторів на шину даних. Навантажувальна здатність кожного з інверторів – два Ттл-входа (Івых0=3,2 мА). Дана мікросхема придатна для переходу до пристроїв ТТЛ. Мікросхема ДО561ЛН1 працює як від напруги 15 В, так і від колекторного U=5 В.
Таблиця 5.3 - Стан входів і виходів інверторів у мікросхемі ДО561ЛН1
| Дозвіл | Вхід Dn | Вихід Qn | |
| По выходу ЕО | По входу Е1 | ||
| Н | Н | Н | У |
| Н | Н | У | Н |
| Н | У | х | Н |
| У | х | х | Z |
Ми будемо використовувати цю мікросхему просто як інвертори, Е1 – завжди буде дорівнює логічному «0», а ЕО – завжди буде дорівнює логічної «1».
5.6 Проектування дешифрувача
Для реалізації дешифрувача для нашого конкретного випадку буде потрібно мікросхема ДО561ЛА7 і ще одна ДО561ЛН1, тільки вона буде працювати в іншому режимі. Мікросхема ДО561ЛН1 буде в цьому випадку працювати як буфер із загальним дозволом (рис 5.9).
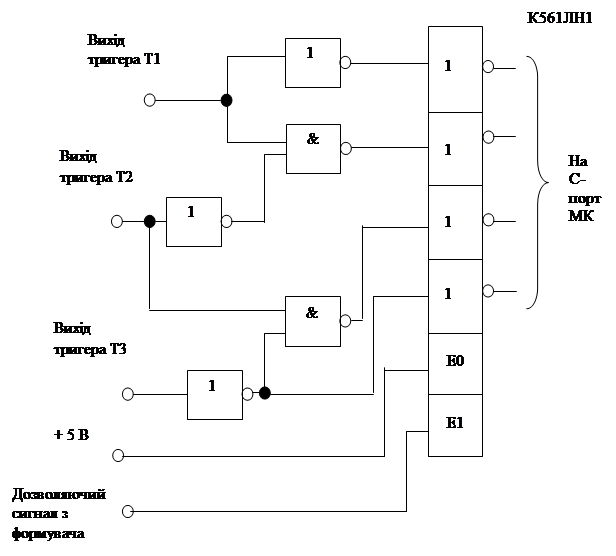
Рисунок 5.9 – Схема дешифрувача
Е0 буде завжди дорівнює логічної «1», а на Е1 буде подаватися імпульс, що дозволяє, з формувача дозволу рахунка з невеликою затримкою. Затримка нам потрібна для того, щоб рахунок починався не на початку наростання реального імпульсу, а наприкінці – коли тригери вже установилися у визначеному значенні.
Таблиця 5.4 - Логічні результати дешифратора
| Виходи тригерів | Виходи дешифрувача | Вид імпульсу | |||||
| X1 | X2 | X3 | Y1 | Y2 | Y3 | Y4 | |
| 1 | 1 | 1 | 1 | 0 | 0 | 1 | ХХ |
| 1 | 1 | 0 | 1 | 0 | 1 | 0 | Робочі |
| 1 | 0 | 0 | 1 | 1 | 0 | 0 | КЗ |
Виходи дешифрувача подаються на порт С мікроконтролера.
5.7 Вибір мікроконтролера
8-bit AVR Мікроконтролер з 4K/8K внутришньосхемною програмувальною FLASH-пам'яттю AT90S8515 Відмінні риси
• AVR RISC архітектура - архітектура високої продуктивності і малого
енергоспоживання
- 118 могутніх команд - більшість однотактових виконань
- 32 8-бітних універсальних робітників регістра
- Продуктивність до 8 мільйонів операцій у секунду при 8 MHz
• ЗУ даних і енергонезалежне ЗУ програми
- 4/8 Кбайт внутришньохемної перепрограмувальної FLASH-пам'яті програм,
ресурс: 1000 циклів стирання/запису
-256/512 байт SRAM
-256/512 байт убудованої EEPROM,
ресурс: 100000 циклів стирання/запису
- Програмувальний захист Flash і EEPROM пам'яті
• Периферія
- 8-бітний таймер/лічильник з окремим попереднім дільником
-16-бітний таймер/лічильник з окремим попереднім дільником,режимами
захоплення/порівняння і подвійним ШІМ з розрядністю 8 -, 9- або 10-битий
- Вбудований аналоговий компаратор
- Програмувальний сторожовий таймер з вбудованим генератором
- Програмувальний канал UART
- Ведучий/відомий SPI послідовний інтерфейс
• Спеціальні функції
- Режим енергозбереження Idle і PowerDown
- Зовнішні і внутрішні джерела переривань
• Специфікація
- Високошвидкісна низькоспоживна CMOS технологія
- Цілком статичне функціонування
• Споживана потужність при 4 МГц, 3V, 25 ° C
- Активний режим: 3.0 m
- Режим Idle: 1.0 m
- Режим Power Down: < 1µA
• Уведення - висновок
- 32 програмувальні лінії введення - висновку
- Корпус PDIP з 40 висновками, PLCC і TQFP з 44 висновками
• Робочі напруги
- 2.7 - 6.0V (AT90S4414-4 і AT90S8515-4)
- 4.0 - 6.0V (AT90S4414-8 і AT90S8515-8)
• Частотний діапазон
- 0 - 4 МГЦ (AT90S4414-4 і AT90S8515-4)
- 0 - 8 МГЦ (AT90S4414-8 і AT90S8515-8)

Рисунок 5.10 - AT90S4414/8515
AT90S4414/8515 є 8-розрядними CMOS мікроконтролерами з AVR удосконаленої RISC архітектурою. Виконуючи більшість команд за один тактовий цикл, мікроконтролери AT90S4414/8515 забезпечують продуктивність 1 MIPS на кожен мегагерц тактової частоти, що дозволяє розроблювачам оптимізировать споживання, що залежить в основному від тактової частоти.
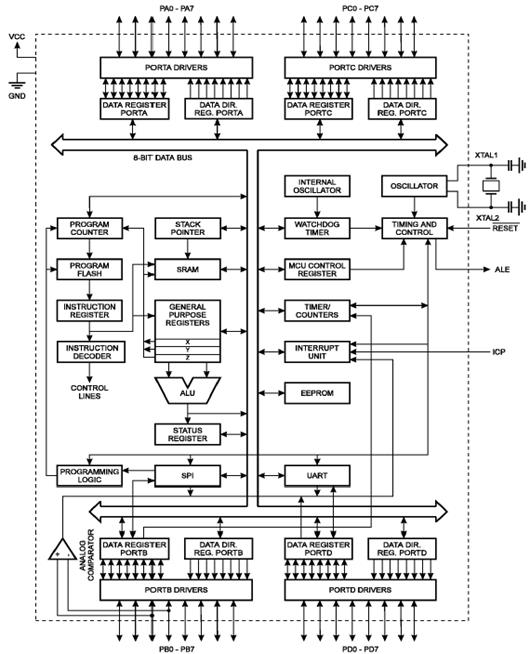
Рисунок 5.11 - Блок-схема AT90S4414/8515
AVR ядро базується на удосконаленої RISC архітектурі з реєстровим файлом швидкого доступу, що містить 32 регістра загального призначення, безпосередньо зв'язаних з арифметико-логічним пристроєм (ALU), і могутньою системою команд. За один тактовий цикл із реєстрового файлу витягаються два операнда, виконується команда і результат записується в регістр призначення. Така високоефективна архітектура забезпечує продуктивність майже в десять разів більшу, ніж стандартні CISC мікроконтролери.
Контролери AT90S4414/8515 мають у своєму розпорядженні наступні можливості: 4/8 Кбайт внутрісистемно програмувальної Flash пам'яті програм, 256/512 Кбайт EEPROM даних, 256/512 Кбайт SRAM даних, 32 лінії I/O загального призначення, 32 робітників регістра загального призначення, гнучкі таймери/лічильники з режимами порівняння, внутрішні і зовнішні переривання, програмувальний послідовний UART, програмувальний сторожовий таймер з убудованим генератором, послідовний SPI порт і два програмно встановлюваних режиму енергозбереження. У режимі Idle зупиняється центральний процесор, але продовжують працювати SRAM, таймери/лічильники, порт SPI і система переривань. У режимі Power Down зберігається вміст регістрів, але зупиняється тактовий генератор і до надходження сигналу переривання або апаратного скидання забороняється виконання усіх функцій мікроконтролера. Мікроконтролери виготовляються за технологією енергонезалежної пам'яті фірми Atmel. Убудована внутрісистемно програмувальна Flash пам'ять програм може бути перепрограмована безпосередньо в системі з використанням послідовного SPI інтерфейсу або за допомогою звичайних програматорів. Об'єднавши 8-розрядне RISC CPU із внутрісистемно програмувальної Flash пам'яттю великого обсягу, фірма створила сімейство могутніх мікроконтролерів, що забезпечують реалізацію недорогих і дуже зручних рішень для великої круговькості застосувань, що вбудовуються. Сімейство AT90S4414/8515 підтримується великою круговькістю засобів розробки програм і систем, що включають: З-компілятори, макроасемблери, відлагодники/симулятори, внутрісхемні емулятори й відлагодничі пристрої.
Призначення виводів:
VCC
Напруга живлення
GND
Земля
Port A (PA7..PA0)
Порт А - 8-розрядний двонаправлений порт уведення-виводу. До виходів порту можуть бути підключені убудовані що підтягують резистори (окремо до кожного розряду). Вихідні буфери забезпечують струм, що втікає, 20 ма і здатні прямо керувати світлодіодними індикаторами. При використанні висновків порту як входи й установці зовнішнім сигналом у низький стан, струм буде випливати з висновків тільки при підключених убудованих резисторах, що підтягують. У процесі скидання висновки порту А переводяться у високоімпедансний стан (навіть при відключеному тактовому генераторі). Порт A при наявності зовнішньої SRAM використовується в якості мультиплексируючої шини адреси/даних.
AT90S4414/8515
Порт B (PB7.. PBO)
Порт B 8-розрядний двонаправлений порт уведення-висновку з убудованими навантажувальними резисторами. Вихідні буфери забезпечують струм, що втікає, 20 ма. При використанні висновків порту як входи й установці їхнім зовнішнім сигналом у низький стан, струм буде випливати з висновків тільки при підключених убудованих навантажувальних резисторах. У процесі скидання висновки порту B переводяться у високоімпедансний стан (навіть при відключеному тактовому генераторі). Порт B використовується також при реалізації різних спеціальних функцій.
Порт С (PC7.. PCO)
Порт ІЗ - 8-розрядний порт уведення-висновку. Вихідні буфери забезпечують струм, що втікає, 20 ма. Порт C використовуються також як виходи адреси при використанні зовнішньої SRAM. При використанні висновків порту як входи і установці їхнім зовнішнім сигналом у низький стан, струм буде випливати з висновків тільки при підключених убудованих навантажувальних резисторах. У процесі скидання висновки порту C переводяться у високоімпедансний стан (навіть при відключеному тактовому генераторі).
Порт D (PD7.. PDO)
Порт D - 8-розрядний двонаправлений порт уведення-висновку з убудованими навантажувальними резисторами. Вихідні буфери забезпечують струм, що втікає, 20 ма. При використанні висновків порту як входи й установці їхнім зовнішнім сигналом у низький стан, струм з висновків буде випливати тільки при підключених убудованих навантажувальних резисторах. Порт D використовується також при реалізації різних спеціальних функцій. У процесі скидання висновки порту D переводяться у високоімпедансний стан (навіть при відключеному тактовому генераторі).
RESET
Вхід скидання. Низький рівень на цьому висновку тривалістю більш 50 ns генерує сигнал скидання мікроконтролера, навіть при зупиненому тактовому генераторі. Можливість організації скидання більш короткими імпульсами не гарантується.
XTAL1
Вхід підсилювача генератора, що інвертує, і вхід зовнішнього тактировання.
XTAL2
Вихід підсилювача генератора, що інвертує.
ICP
Вхідний контакт захоплення таймера/лічильника 1.
OC1B
Вихідний контакт порівняння в режимі Compare B таймера/лічильника 1.
ALE
Строб дозволу фіксації адреси, використовувана для дозволі зовнішньої пам'яті. Строб ALE використовується для фіксації молодшого байта адреси в засувках адреси протягом першого циклу звертання до пам'яті. Протягом другого циклу при звертанні до даних, висновки AD0- AD 7 використовується як шину даних.
5.8 Вибір рідкокристалічного індикатора
Для розробки підійде РКІ фірми Winstar WH0802A-NGG-CT, в ньому 2 рядка і 8 знакомісць у кожному рядку. Розглянутий РКІ за допомогою стандартного 14-контактного рознімання (табл.5.4) обмінюється інформацією з керуючим мікроконтролером (у нашому випадку з AVR). AVR-мікроконтролер посилає в РКІ команди (табл.5.5), що керують режимами його роботи, і ASCII-кодами виведених символів. У свою чергу, РКІ може посилати AVR-мікроконтролеру по його запиті інформацію про свій стан і дані зі своїх внутрішніх блоків пам'яті.
Таблиця 5.4 - Опис виводів стандартного роз’єму РКІ на базі HD44780
| N | Назва висновку | Опис |
| 1 | VSS | (-) Живлення. 0 V. |
| 2 | VDD | (+) Живлення.+5V. |
| 3 | V0 | Напруга зсуву, що керує контрастністю |
| 4 | RS | Вхід. Високий рівень - Дані; Низький - Команди |
| 5 | R/W | Вхід. Висок-Читання, Низьк-Запис |
| 6 | E | Вхід. Строб, що супроводжує сигнали на шині "команди/дані" |
| 7 | DB0 | Шина "команди/дані" |
| 8 | DB1 | |
| 9 | DB2 | |
| 10 | DB3 | |
| 11 | DB4 | |
| 12 | DB5 | |
| 13 | DB6 | |
| 14 | DB7 |
Три вивода 14-контактного рознімання призначені для подачі живильної напруги і напруги зсуву, що керує контрастністю дисплея. На рис. 5.12 показана схема підключення цих виводів. Ї
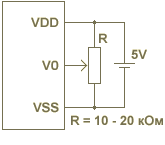
Рисунок 5.12 - Схема живлення РКІ
З 11 виводів, що залишилися, 8 (DB0 - DB7) використовуються для організації мультиплексированної шини "команди / дані", і на 3 вивода (RS, R/W, E) AVR-мікроконтролер виставляє керуючі сигнали. На рис.5.13 зображені часові діаграми цих сигналів при записі команд / даних у контролер РКІ. За допомогою сигналу на лінії RS мікропроцесор повідомляє контролерові індикатора про те, що саме передається по шині: команда або дані. Сигнал на лінії Е є стробом, що супроводжує сигнали на шині "команди / дані". Запис інформації в РКІ відбувається по спаду цього сигналу. Потенціал на керуючому висновку R/W задає напрямок передачі даних: запис у RAM індикатора (R/W=0) або зчитування відтіля (R/W=1). Контролер РКІ після прийому байта команди або байта даних вимагає деякого часу (табл. 5.5) для обробки отриманої інформації, протягом якого AVR-мікроконтролер не повинний виконувати нових передач.
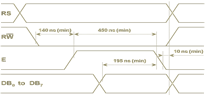
Рисунок 5.13 - Запис даних у РКІ
Для того, щоб визначити, коли контролер РКІ закінчить свої внутрішні операції, AVR може опитувати BUSY-прапор індикатора (команда "читання busy-прапора"), що скинеться тільки тоді, коли контролер РКІ звільниться. Другий, більш простий спосіб полягає в тім, що керуючий мікроконтролер, знаючи, скруговьки часу потрібно РКІ на обробку тієї або іншої команди, просто виконує тимчасову затримку після кожної передачі інформації. Якщо під час циклу запису AVR-мікроконтролер передає в контролер індикатора код команди, то цей код записується в регістр команд контролера РКІ, і команда відразу ж починає виконуватися. Якщо AVR-мікроконтролер передає в контролер РКІ дані, що являють собою ASCII-коди відображуваних символів, то вони записуються в буфер даних (DDRAM), що містить 80 осередків (рис. 5.14). При записі або зчитуванні буфера даних звертання здійснюється до осередку, на яку в даний момент указує курсор.

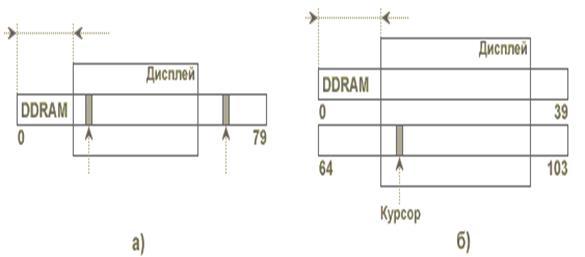
а - однорядковий РКІ, б - двостроковий РКІ
Рисунок 5.14 - Відображення на дисплеї символів, ASCII-коди яких записані в DDRAM
Таблиця 5.5 - Система команд контролера НD4478
| Код | Опис команди | Час виконання команди (fosc= 250кгц) | |||||||||
| RS | R/W | DB7 | DB6 | DB5 | DB4 | DB3 | DB2 | DB1 | DB0 | ||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | Очистити дисплей і установити курсор у нульову позицію (адреса 0) | 82мкс до 1.64мс |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | * | Установити курсор у нульову позицію (адреса 0). Установити дисплей щодо буфера DDRAM у | 40мкс до 1.6мс |
| початкову позицію. Уміст DDRAM при цьому не міняється. | |||||||||||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | I/D | S | Установити напрямок зрушення курсору вправо (I/D=1) або вліво (I/D=0) при записі/читанні чергового коду в DDRAM. Дозволити (S=1) зрушення дисплея разом зі зрушенням курсору. | 40мкс |
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | D | C | B | Уключити(D=1)/виключити(D=0) дисплей. Запалити(C=1)/погасити(C=0) курсор. Зображення курсору зробити миготливої (B=1). | 40мкс |
| 0 | 0 | 0 | 0 | 0 | 1 | S/C | R/L | * | * | Перемістити курсор (S/C=0) або зрушити дисплей (S/C=1) вправо (R/L=1) або вліво(R/L=0). | 40мкс |
| 0 | 0 | 0 | 0 | 1 | DL | N | F | * | * | Установити розрядність шини даних 4 біти (DL=0) або 8 біт (DL=1), круговькість рядків дисплея - одна (N=0) або дві (N=1), шрифт - 5х7 крапок (F=0) або 5х10 крапок (F=1). | 40мкс |
| 0 | 0 | 0 | 1 | ACG | Установка адреси CGRAM. Після цієї команди дані будуть записуватися/зчитуватися до/з CGRAM. | 40мкс | |||||
| 0 | 0 | 1 | ADD | Установка адреси DDRAM. Після цієї команди дані будуть записуватися/зчитуватися до/з DDRAM. | 40мкс | ||||||
| 0 | 1 | B F | AC | Читання стану busy-прапора (BF) і лічильника адреси. | 1мкс | ||||||
| 1 | 0 | Дані | Запис даних у DDRAM або CGRAM. | 40мкс | |||||||
| 1 | 1 | Дані | Читання даних з DDRAM або CGRAM. | 40мкс | |||||||
Буфер даних має більше осередків, чим число знакомісць дисплея. Зміщаючи вікно індикатора щодо буфера даних (див. систему команд), можна відображати на дисплеї різні області буфера. У двострокових індикаторів перші 40 осередків буфера даних, звичайно, відображаються на верхньому рядку дисплея, а другі 40 осередків - на нижньому рядку. Зрушення вікна дисплея щодо буфера даних для верхнього і нижнього рядків відбувається синхронно. Курсор буде видний на індикаторі тільки в тому випадку, якщо він потрапив у зону видимості дисплея (і якщо попередньо була подана команда відображати курсор). Крім DDRAM, контролер РКІ містить ще один блок пам'яті - знакогенератор. Його "прошивання", тобто відповідність ASCII-кодів накресленню символів. Приклад такого "прошивання" представлений у рис 5.16. Знакогенератор складається з двох частин. Основна його частина являє собою ПЗУ (CGROM) і неї, отже, не можна змінити. Друга частина, у якій задаються накреслення символів для перших 16-ти кодів таблиці знакогенератора, являє собою перепрограмувальне ОЗУ(CGRAM). Мається можливість задати накреслення 8 символів, що відповідають кодам 0(8), 1(9), 2(10)... 7(15). Для кожного з восьми перепрограмувальних символів у CGRAM приділяється по 8 комірок пам'яті, кожна з яких відповідає одному рядкові крапок у зображенні символу. Таким чином, перепрограмувальна частина знакогенератора містить 64 байта пам'яті (8х8). Приклад кодування CGRAM для однієї букви приведений на рис. 5.15.
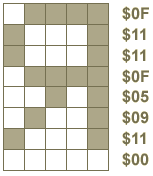
Рисунок 5.15 – Приклад кодування символу
Рисунок 5.16 – Відповідність ASCII-кодів накресленню символів
5.9 Вибір двигуна
Для управління кроковим двигуном у нашому випадку передбачено використання двох типів двигуна:
- синхронний двигун;
- кроковий двигун.
У разі використання крокового двигуна для управління електродом найбільш підходить двигун типа ШД-300-300 трьохфазний.
Технічні характеристики двигуна ШД-300-300:
- напруга живлення – 24В;
- частота живлячої мережі – 50Гц;
- споживаний струм – 1,3 А;
- один крок двигуна – 3°;
- круговькість кроків у секунду – 300;

Рисунок 5.17 – Порядок чергування імпульсів напруги двигуна.
Управління цим двигуном представлене у дипломному проекті студентки Семидоцької Т. В. за темою „Спроектувати автоматичну систему дискретної реєстрації поверхні алмазного круга на персональному комп’ютері”
6. РОЗРОБКА ПРОГРАМНОГО ЗАБЕСПЕЧЕННЯ
Програмне забезпечення - це сукупність програм для реалізації розробленої системи на базі використання засобів обчислювальної техніки.
Однією з складових частин програмного забезпечення є операційна система, яка призначена для розширення функціональних можливостей обчислювального обладнання, контролю і управління процесами обробки даних, автоматизації роботи програмістів.
Так, зокрема, Windows ХР, яка використовувалась при розробці та тестуванні програми, являє собою високопродуктивну, багатозадачну і багатопотокову 32-розрядну операційну систему з зручним графічним інтерфейсом і розширеними мережевими можливостями. Операціійна система розроблена фірмою Microsoft (США). Важливою її особливістю є 32-розрядна архітектура, яка забезпечує більш високу продуктивність системи, знімає багато обмежень на системні ресурси.
Захищений режим, що застосовується в Windows ХР, підтримує роботу системи у випадках збою прикладної програми, що є досить вагомою перевагою над іншими ОС, захищає прикладну програму від випадкового втручання одного процесу в інший, забезпечує певну стійкість до вірусів.
Для розробки програмного забеспечення було застосовано середовище програмування Algorithm Builder for AVR 5.20. Дане середовище забезпечує повний цикл розробки, починаючи від введення алгоритму, включаючи налагодження, і закінчуючи внутрісхемним програмуванням кристала. Ви будете мати можливість розробляти програми як на рівні асемблера, так і на макрорівні, при якому можлива робота з знакоперемінними величинами довільної довжини. Це наближає можливості програмування до мові високого рівня. Графічні технології створення програми розкривають нові можливості для програмістів. Вони дозволяють уводити програми на площині у виді алгоритму з деревоподібною структурою. У результаті вся логічна структура програми стає цілком наочною. Основним призначенням таких технологій є максимальне приведення інтерфейсу розробки до природи людського сприйняття. Освоєння такого середовища набагато простіше, ніж освоєння класичного асемблера. Більш зручний інтерфейс розкриває нові можливості для розробки. По оцінці користувачів, час створення програмного забезпечення скорочується в 3 - 5 разів у порівнянні з класичним асемблером.
Середовище призначене для роботи під ОС Windows 95/98/2000/NT/ME/XP.
Будь-яке програмне забезпечення можна розбити на окремі логічно завершені фрагменти. Як правило, фінальним оператором цих фрагментів є такі оператори як безумовний перехід або повернення з підпрограми, тобто оператори, після яких лінійне виконання програми однозначно припиняється. Розробка програмного забезпечення в середовищі Algorithm Builder зводиться до формування таких блоків, розміщенню їх на площині і встановленню між ними векторних зв'язків з умовних і безумовних переходів.
Елементи алгоритму
Для побудови алгоритму в Algorithm Builder передбачено сім елементів:
FIELD – Поле;
LABEL – Мітка;
VERTEX – Вершина блоку;
CONDITION – Умовний перехід;
JMP Vector – Відносний безумовний перехід;
SETTER – Настроювач периферійних пристроїв;
TEXT – Рядок локального текстового редактора.
Розробка алгоритму
Програма працює за алгоритмом наведеним на рисунку 6.1.
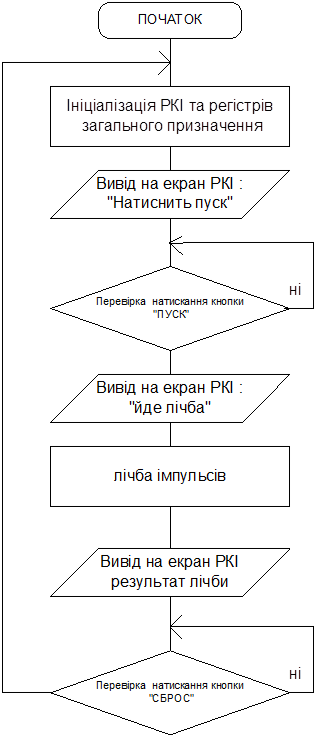
Рисунок 6.1 – Алгоритм роботи програми
Опис інтерфейсу користувача
Після подачі живлення на екран РКІ виводиться напис „натиснить ПУСК”. Після натиснення на кнопку „ПУСК” починається лічба імпульсів. Коли буде пораховане 1000 загальних імпульсів, круговькість імпульсів короткого замикання, робочих та холостих буде виведено на екран РКІ автоматично. Якщо натиснути кнопку „СБРОС” операція повториться. Лістинг програми у додатку В.
7. РОЗРАХУНОК НАДІЙНОСТІ СИСТЕМИ
На етапі проектування визначаються розрахункові показники надійності.
Завдання розрахунку показників надійності полягає в тому, щоб за наявними відомостями про надійність комплектуючих виробів і зв'язки між ними, визначити показники надійності пристрою, що розробляється.
Розрахунок показників надійності пристрою проводитися з метою визначення, чи досяжні задані показники надійності, що розробляється.
Необхідно виконати наближений розрахунок надійності принципової схеми, середній наробіток на відмову повинен не перевищувати 10000 годин, середній час відновлення не більше 1.5 години.
Для наближеного розрахунку надійності приладу необхідно мати наступні дані: номенклатура і круговкість комплектуючих виробів одного вигляду, що входять до складу пристрою, що розробляється, а також статичні дані про інтенсивність їх відмов.
Таблиця 7.1 – Розрахунку показників надійності
| Найменування і тип | Кругов-сть Ni | li *106, 1/ч | Nili*106, 1/ч | Квід, % | MTTRi | Квід* MTTRi |
| ATmega8515 | 1 | 0,001 | 0,001 | 0,000138122 | 0,575 | 7,94202E-05 |
| K561ЛН1 | 2 | 0,68 | 1,36 | 0,187845304 | 0.575 | 0,187845304 |
| К561ЛА7 | 1 | 0,68 | 0,68 | 0,093922652 | 0.575 | 0,093922652 |
| К561ТР2 | 1 | 0,68 | 0,68 | 0,093922652 | 0.575 | 0,093922652 |
| КРЕН5А | 1 | 1,44 | 1,44 | 0,198895028 | 0.4 | 0,198895028 |
| КЦ407 | 1 | 0.12 | 0,12 | 0,016574586 | 0.4 | 0,016574586 |
| С1, С2, С3, С4, С5, С6 (220мк*25B) | 6 | 0.135 | 0,81 | 0,111878453 | 0.3 | 0,111878453 |
| С7, С8, С9, С10, С11, С12 (100пФ) | 6 | 0,135 | 0,81 | 0,111878453 | 0,4 | 0,044751381 |
| С13 (1мкФ) | 1 | 0,135 | 0,135 | 0,018646409 | 0.3 | 0,018646409 |
| С14 (20 пФ) | 2 | 0,135 | 0,27 | 0,037292818 | 0,4 | 0,014917127 |
| КД509А | 1 | 0,03 | 0,03 | 0,004143646 | 0,4 | 0,001657458 |
| R1 МЛТ-0,5-200 ±5% | 1 | 0,07 | 0,07 | 0,009668508 | 0.3 | 0,009668508 |
| R2 МЛТ-0,5-59к ±5% | 1 | 0,07 | 0,07 | 0,009668508 | 0.3 | 0,009668508 |
| R3, R4 МЛТ-0,125-3к ±5% | 2 | 0,07 | 0,14 | 0,019337017 | 0.3 | 0,019337017 |
|
| ||||||
| Продовження табл. 7.1 | ||||||
| R5, R6 МЛТ-0,125-2к ±5% | 2 | 0,07 | 0,14 | 0,019337017 | 0.3 | 0,019337017 |
| R7 МЛТ-0,5-240 ±5% | 1 | 0,07 | 0,07 | 0,009668508 | 0.3 | 0,009668508 |
| R8 переміний (1-20 Ом) | 1 | 0.135 | 0,135 | 0,018646409 | 0.3 | 0,018646409 |
| R9 Trimer 3296 (1к – 10к Ом) | 1 | 0,1 | 0.1 | 0,013812155 | 0.3 | 0,013812155 |
| Кнопки | 2 | 0,05 | 0,1 | 0,013812155 | 0,250 | 0,003453039 |
| Пайки | 193 | 0.01 | 1.93 | 0,024033149 | 0,4 | 0,00961326 |
| Сума |
|
| 7,24 | 1,01 |
| 8,96E-01 |
MTTR i – середня година ремонту, мінімальний час заміни елемента;
 - середній час відновлення усього виробу;
- середній час відновлення усього виробу;
 . – круговькість відмовлень за мільйон годин усього пристрою (λустр.).
. – круговькість відмовлень за мільйон годин усього пристрою (λустр.).
Таким чином, середній час ремонту виробу 0,896 години.
Коефіцієнт експлуатації (в умовах: земля, стаціонарні умови):
Кэ=1,0
Наробіток на відмовлення:
 . (7.1)
. (7.1)
Відмовлення за тисячу годин:
 (ч). (7.2)
(ч). (7.2)
Один майстер за тиждень може відремонтувати:
 .(7.3)
.(7.3)
Круговькість відмовлень за тиждень:
 . (7.4)
. (7.4)
Круговькість елементів на обслуговування:
 (шт). (7.5)
(шт). (7.5)
Розрахунок запасних виробів і пристосувань (ЗВП)
Nрасч i – розрахункова круговькість елементів для замовлення:
 . (7.6)
. (7.6)
Nзаказ – круговькість ЕРЕ що замовляються.
Таблиця 7.2 – Розрахунку ЗВП
| Найменування і тип | Nод.парам | li*106, 1/ч | Nili*106, 1/ч | Nрасч | Nзаказ |
| ATmega8515 | 1 | 0,001 | 0,001 | 0,00876 | 1 |
| K561ЛН1 | 2 | 0,68 | 1,36 | 11,9136 | 12 |
| К561ЛА7 | 1 | 0,68 | 0,68 | 5,9568 | 6 |
| К561ТР2 | 1 | 0,68 | 0,68 | 5,9568 | 6 |
| КРЕН5А | 1 | 1,44 | 1,44 | 12,6144 | 13 |
| КЦ407 | 1 | 0.12 | 0,12 | 1,0512 | 2 |
| С1, С2, С3, С4, С5, С6 (220мк*25B) | 6 | 0.135 | 0,81 | 7,0956 | 8 |
| С7, С8, С9, С10, С11, С12 (100нФ) | 6 | 0,135 | 0,81 | 7,0956 | 8 |
| С13 (1мкФ) | 1 | 0,135 | 0,135 | 1,1826 | 2 |
| С14 (20 пФ) | 2 | 0,135 | 0,27 | 2,3652 | 3 |
| КД509А | 1 | 0,03 | 0,03 | 0,2628 | 1 |
| R1 МЛТ-0,5-200 ±5% | 1 | 0,07 | 0,07 | 0,6132 | 1 |
| R2 МЛТ-0,5-59к ±5% | 1 | 0,07 | 0,07 | 0,6132 | 1 |
| R3, R4 МЛТ-0,125-3к ±5% | 2 | 0,07 | 0,14 | 1,2264 | 2 |
| R5, R6 МЛТ-0,125-2к ±5% | 2 | 0,07 | 0,14 | 1,2264 | 2 |
| R7 МЛТ-0,5-240 ±5% | 1 | 0,07 | 0,07 | 0,6132 | 1 |
| R8 переміний (1-20 Ом) | 1 | 0.135 | 0,135 | 1,1826 | 2 |
| R9 Trimer 3296 (1к – 10к Ом) | 1 | 0,1 | 0.1 | 0,876 | 1 |
| Кнопки | 2 | 0,05 | 0,1 | 0,876 | 1 |
Отже, розрахункові показники надійності пристрою (напрацювання на відмову пристрою MTBF=138121 годин, час відновлення для пристрою MTTR=0,896 години) задовольняє вимогам надійності, що пред'являються пристрою, виходячи з ТЗ (напрацювання на відмову пристрою MTBF= 10000 годин, час відновлення для пристрію MTTR=1.5 години).
8. ТЕХНІКО-ЕКОНОМІЧНЕ ОБҐРУНТУВАННЯ РОЗРОБКИ І ВИРОБНИЦТВА „САУ ПОЛОЖЕННЯМ ПРАВЛЯЧОГО ЕЛЕКТРОДА В ПРОЦЕСІ ЕЛЕКТРОЕРОЗІЙНОГО ВИПРАВЛЕННЯ АЛМАЗНОГО КРУГА”
„САУ положенням правлячого електрода в процесі електроерозійного виправлення алмазного круга” далі прилад, знайде застосування в області металоріжучих і шліфувальних робіт для одержання інформації про стан виправлення алмазного круга і керуванням цим процесом.
Студент групи СУА-06-с Шепеленко В. В.
Узгоджено:
Керівник роботи ______________ доц. Константинов С.В.
Консультант по проектуванню ______________ доц. Суков С.Ф.
Нормоконтролер ______________ доц. Турупалов В. В.
ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
ДИПЛОМНИЙ ПРОЕКТ
Донецьк-2007
У комплексному проекті: „Спроектувати агрегатний верстат для обробки отворів у кронштейні та процес заточування свердел алмазними кругами з електроерозійним впливом на його робочу поверхню”
Спецчастина 2. „Спроектувати систему автоматичного керування положенням прав ’ ящего електрода в процесі електроерозійної правки алмазного круга на базі персонального комп ’ ютера”
1. Тема проекту (роботи) Спроектувати систему автоматичного керування положенням прав ’ ящего електрода в процесі електроерозійної правки алмазного круга на базі персонального комп ’ ютера.
затверджена наказом по інституту від “ 15” березня 2007 р.№ 278-14
2. Термін здачі студентом закінченого проекту (роботи) 27.06.2007р.
3. Вихідні дані до проекту (роботи)_результати роботи по НДРс, курсовий проект з проектування
4. Зміст розрахунково-пояснювальної записки (перелік питань, що їх належить розробити) 1_Аналіз т ехнологічного процесу алмазної обробки матеріалів . 2 Сучасні методи обробки та правки амазних кругов . 3.Методика рєєстрації одиничних імпульсів та їх класифікація 4. Розробка функціональної схеми 5. Технічна реалізація. 6. Розробка програмного забезпечення. 7 Розрахунок надійності системи. 8 Розрахунок економічної ефективності.
РЕФЕРАТ
Дипломний проект: с., рис., додатків, джерел, табл.
У даній роботі спроектована система автоматичного управління положенням електрода в процесі електроерозійної правки алмазного круга на базі мікроконтролера.
Вивчено сучасні методи електроерозійної обробки при шліфуванні твердих матеріалів і сучасна методика реєстрації одиничних імпульсів і їхні види для визначення режимів максимальної продуктивності електроерозійного виправлення. Довідалися вплив різних видів імпульсів на процес виправлення.
Виготовлено реальну модель і програмне забезпечення до неї, і вона перевірена на працездатність.
АЛМАЗНИЙ КРУГ, ОДИНИЧНИЙ ІМПУЛЬС, ЕЛЕКТРОЕРОЗІЙНА ОБРОБКА, ІМПУЛЬС КОРОТКОГО ЗАМИКАННЯ, ІМПУЛЬС ХОЛОСТОГО ХОДУ, РОБОЧИЙ ІМПУЛЬС, ЗВ'ЯЗУВАННЯ, АЛМАЗНЕ ЗЕРНО, РЕЖИМ ВИПРАВЛЕННЯ, МІКРОКОНТРОЛЕР, РІДКОКРИСТАЛИЧНИЙ ІНДИКАТОР.
ЗМІСТ
ПЕРЕЛІК СКОРОЧЕНЬ
ВСТУП
1. Профілювання алмазних струмопровідних кругов способом теплового впливу (електроерозійний метод)
1.1 Фізичні основи електроерозійної обробки алмазоносного шару
2. Сучасні методи електроерозійної обробки при шліфуванні твердих матеріалів
3. Методика реєстрації одиничних імпульсів і їхня класифікація
4. Розробка функціональної схеми
5. Технічна реалізація
5.1 Розрахунок ланки виділення імпульсів різної амплітуди і вибір елементів
5.2 Розрахунок і вибір елементів для реалізації блоку опорних напруг
5.3 Вибір компараторів
5.4 Вибір тригерів і принцип їхньої роботи
5.5 Проектування формувача скидання тригерів і дозволу рахунка
5.6 Проектування шифрувача і вибір елементів для його реалізації
5.7 Вибір мікроконтролера і рідкокристалічного індикатора
5.8 Вибір крокового двигуна і управління їм
6. Розробка програмного забезпечення
6.1 Розробка алгоритму
6.2 Опис інтерфейсу користувача
7. Розрахунок надійності системи
8. Техніко-економічне обґрунтування розробки і виробництва САК положенням правлячого електрода в процесі електроерозійного виправлення алмазного круга
8.1 Розрахунок собівартості і ціни приладу
8.1.1 Розрахунок вартості основних матеріалів
8.1.2 Розрахунок вартості куплених комплектуючих виробів
8.1.3 Розрахунок основної заробітної плати
8.2 Розрахунок валового прибутку і побудова графіка беззбитковості
ВИСНОВКИ
ПЕРЕЛІК ПОСИЛАНЬ
ДОДАТОК А. Технічне завдання
ПЕРЕЛІК СКОРОЧЕНЬ
САУ – система автоматичного управління
МЕП – міжелектродний простір
ЕЕО – електроерозійна обробка
КЗ – коротке замикання
РИ – робочі імпульси
ХХ – холостой хід
ЕЕП – електроерозійна правка
СОЖ –
ЧКЗ – часткове коротке замікання
РКІ – рідкокристалічний індикатор
ВСТУП
Успішне розв’язання задач прискорення науково-технічного прогресу нерозривно зв'язано із широким освоєнням передових технологій, підвищенням продуктивності праці і поліпшенням якості виробленої продукції.
Особливо це відноситься до так називаних важкооброблюваних матеріалів, використовуваним останнім часом при виробництві машин і механізмів, що працюють в екстремальних умовах, обробка яких зв'язана з визначеними труднощями. До таких матеріалів відносяться титанові сплави, що застосовуються в різних галузях техніки через високих міцностних характеристик, малої щільності й інших специфічних властивостей, ванадієві швидкорізальні сталі, що мають високу зносостійкість і міцність.
Використання для їхньої чистової обробки шліфування абразивними кругами характеризується низькою продуктивністю і, у ряді випадків, не задовольняє вимогам, пропонованим до якості обробки.
Серед нових високопродуктивних технологічних процесів обробки важкооброблюваних матеріалів у даний час усе більш широке поширення одержує алмазне шліфування кругами на металевому зв'язуванні, заправленими електроерозійним способом, або комбіновані способи алмазного шліфування з підтримкою в процесі обробки властивостей, що ріжуть, робочої поверхні круга за допомогою електроерозійних впливів.
Електроерозійні впливи на робочу поверхню круга. можуть виконуватися по двох схемах - з підведенням технологічного струму в зону різання або в автономну зону. Обидві схеми знайшли своє застосування при обробці зносостійких штампових сталей, нержавіючих сталей, магнитотвердих сплавів і інших твердих металів і сплавів.
Разом з тим, відсутні рекомендації з вибору способів алмазного шліфування з підтримкою властивостей круга, що ріжуть, за допомогою електроерозійних впливів при обробці титанових сплавів і ванадієвих швидкорізальних сталей, що стримує застосування нових способів шліфування при обробці цих перспективних матеріалів.
Не досліджені шляхи підвищення продуктивності електроерозійного виправлення за рахунок керування процесів з урахуванням видів одиничних імпульсів, інтенсифікації керування механічного руйнування алмазних зерен і ін. Відсутні зведення про вплив схем підведення технологічного струму на вихідні технологічні показники обробки титанового сплаву ВТГ4 і стали Р6М5фз.
Метою роботи є спроектувати систему автоматичного управління положенням електрода при виправленні алмазного круга електроерозійним способом, за рахунок керування процесом обліку видів одиничних імпульсів, висновку їх на екран РКІ і видачі визначеної серії імпульсів на кроковий двигун за підсумками підрахунку круговькості видів імпульсів.
1. ПРОФІЛЮВАННЯ АЛМАЗНИХ СТРУМОПРОВІДНИХ Кругов СПОСОБОМ ТЕПЛОВОГО ВПЛИВУ (ЕЛЕКТРОЕРОЗІЙНИМ МЕТОДОМ)
Застосування електроерозійної обробки для профілювання алмазних струмопровідних кругов є досить перспективним. Це порозумівається декруговькома специфічними особливостями, властивому даному методові: наявністю міжелектродного зазору, вибірковістю процесу і минаючих розрядів, полярним ефектом і ін. Перші результати, що підтвердили ці припущення, були отримані в 1965 р. лабораторією правлячих інструментів ВНІІАЛМАЗа. З цього часу були проведені широкі експериментальні і теоретичні дослідження, що підтвердили доцільність застосування електроерозійної обробки при профілюванні алмазних струмопровідних кругов.
При профілюванні алмазних струмопровідних кругов способом теплового впливу виникає питання про якість виправлення, унаслідок цього круг може бути не готово до подальшої роботи, хоча його «очищення» було вже проведене. Відомо, що при цьому методі виникають різні види імпульсів: холості, робочі, фіктивні і короткого замикання. Вид імпульсів залежить від величини міжелектродного проміжку і визначає продуктивність електроерозійного видалення оброблюваного матеріалу. Розглянемо залежність МЕП на види імпульсів і продуктивність ЕЕО на прикладі рис.1.1.
Рисунок 1.1 - Вплив міжелектродного зазору на види імпульсів
Як видно з приведеного графіка, у міру збільшення зазору від зменшується число імпульсів КЗ і росте продуктивність обробки. Існує єдина точка, що відповідає зазорові , у якій через МЕП проходить 100% робочих імпульсів і, якби при 100%-ном використанні імпульсів, можливому тільки при високій концентрації продуктів ерозії, не зникала і «евакуаційна здатність» МЕП, цій точці повинна була б відповідати і максимальна продуктивність. Однак, унаслідок того, що при 100%-ном використанні імпульсів можливе виникнення коливального режиму сервопривода, максимальна швидкість знімання відповідає 5-10% холостих імпульсів при відсутності імпульсів КЗ. При подальшому збільшенні зазору , коли круговькість холостих імпульсів перевищує 5-10%, продуктивність починає падати. Таким чином, здійснюючи управління процесом ЕЕО з урахуванням видів одиничних імпульсів, можна, через універсальність методу, значною мірою зменшити трудомісткість пошуку режимів, що забезпечує максимальну продуктивність електроерозійної обробки. Завдання полягає в тім, щоб розподілити одержувані імпульси на типи і зробити висновок про поточний процес виправлення алмазного круга. Імпульси короткого замикання повинні майже відсутствувати, а холостого ходу – не більш 10%. Якщо отримані дані не відповідають установленим критеріям, треба змінити зазор між електродом і поверхнею алмазного круга, щоб одержати оптимальний режим виправлення, що відповідає нашим критеріям.
1.1 Фізичні основи електроерозійної обробки алмазного шару
Оскруговьки алмазоносний шар струмопровідного шліфувального круга складається з двох різнорідних матеріалів — струмопровідного зв'язування і не струмопровідних алмазних зерен і наповнювача, процеси, що протікають на електродах, у розглянутій обробці будуть мати специфічні особливості, відмінні від електроерозійної обробки звичайних матеріалів. Передбачається наступний механізм обробки алмазоносного шару. При зближенні алмазного круга (рис. 1.2) з електродом-інструментом до розрядної відстані по найкоротшому шляху між струмопровідними ділянками їхніх поверхонь виникають імпульсні розряди, сумарний вплив яких приводить до ерозії струмопровідних компонентів алмазоносного шару (металевого зв'язування). Паралельно з ерозією зв'язування відбувається оголення алмазних зерен, що, входячи в контакт з електродом-інструментом, випадають при критичному закріпленні їх у зв'язуванні круга. Отже, процес електроерозійної обробки алмазоносного шару складається з ерозійного руйнування зв'язування і механічного видалення алмазних зерен. Інтенсивність знімання алмазоносного шару круга Q у такому випадку може бути визначена:
Q=(Vc+Vз)*τ, (1.1)
де Vc. — обсяг зв'язування, що видаляється; Vз - обсяг зерен, що видаляються; τ — час обробки.
У сталому режимі лінійні швидкості видалення алмазних зерен і зв'язування рівні між собою, отже, алмазоносный шар, що знімається за час обробки, може бути визначений через обсяг зв'язування, що видаляється:
Q=k*Vс*τ, (1.2)
де k — коефіцієнт, що враховує об'ємний зміст у зв'язуванні алмазних зерен.
|
|
1 – зв'язування алмазного шару; 2 – алмазні зерна; 3 – розряди; 4 – міжелектродне середовище; 5 – електрод-інструмент
Рисунок 1.2 - Схема процесу електроерозійної обробки струмопровідного шару.
При профілюванні алмазних кругов важливий і зворотний процес — знос електрода-інструмента, що, так само як і обробка алмазоносного шару, відбувається в результаті електроерозійних і механічних процесів. Електроерозійні процеси характеризуються ерозією матеріалу електрода-інструмента при впливі імпульсних розрядів, а механічні — зносом електрода-інструмента в результаті контакту з ним алмазних зерен.
Отже, при даній обробці алмазних струмопровідних кругов па обох електродах протікають два процеси: електроерозійний, і механічний.
Основу електроерозійних процесів складає ефект ерозії металу в імпульсному електричному розряді. Більшість експериментальних і теоретичних досліджень, проведених у нашій країні і за рубежем, визначають електротермічну природу електричної ерозії, основні положення якої полягають у наступному. При підведенні напруги до електродів у міжелектродному проміжку виникає електричне поле з найбільшою напруженістю в напрямку, що проходить через близько розташовані ділянки на поверхні електродів. При визначеному критичному напруженні пробою порушується діелектрична міцність середовища й утвориться іонізований канал наскрізної провідності. У його утворенні беруть участь диспергированні провідні частки, що знаходяться в міжелектродній рідини і, що втягуються частково в зону розряду уздовж силових ліній електричного поля. Після утворення предразрядного каналу, що з'єднує обидва електроди, починає формуватися основний розрядний канал, при утворенні якого відбувається додаткова іонізація проміжку, що призводить до розширення каналу розряду. По цьому каналі спрямовується електрична енергія у виді імпульсного розряду. Завдяки високій концентрації енергії в зоні розряду розвивається висока температура, що перетвориться на електродах в об'ємні і поверхневі теплові джерела. Виникаючі в результаті ефекту Джоуля-Ленца і при передачі тепла безпосередньо з каналу розряду, ці джерела нагрівають ділянки електродів, що знаходяться в зоні розряду, до високих температур, достатніх для розплавлювання і часткового випару металу.
Природа евакуації розплавленого металу трактується різними авторами по-різному. Ряд гіпотез пояснює евакуацію металу електродинамічними силами, скипанням розчиненого в металі газу, мікроскопічними неоднорідністями, що завжди є в металі і різних властивостях, що володіють, і іншими явищами. Так чи інакше, метал видаляється з локальних поверхонь електродів, застигаючи в навколишнім середовищі у виді дрібних часток, а на поверхні електродів утворяться лунки визначеного розміру і форми. Після розряду протягом деякого часу відбувається деіонизація проміжку (відновлення електричної міцності), і далі через визначений період процес повторюється між іншими прилеглими ділянками електродів. Виходячи з цього, обсяг зв'язування, що видаляється з алмазного круга, може бути виражений через суму обсягів, що видаляються від дії одиночних розрядів:
Vc=∑Vi. (1.3)
Дане співвідношення справедливе при збереженні аддитивности процесу, при якому дія одного розряду не накладається на дію наступного. Підставляючи дане співвідношення у вираження (1), одержуємо рівняння, що характеризує інтенсивність знімання алмазоносного шаруючи:
Q=(1+Vз/Vc)ΣVi*τ, (1.4)
де Vi — обсяг зв'язування, що видаляється в i-м розряді.
При обробці алмазоносного шару обсяг зв'язування, що видаляється, в одиничному імпульсному розряді залежить також від ступеня розміщення лунок і зв'язуванню між алмазними зернами. Відповідність цих параметрів впливає не тільки на розвиток лунок, але і на якість алмазних зерен, що знаходяться поблизу розряду.
Механічні процеси протікають на електродах у випадку, якщо величина міжелектродного зазору порівнянна з розміром алмазних зерен, і виявляються у видаленні алмазних зерен у міру їхнього оголення зі зв'язування круга й у механічному зносі електрода-інструмента від дії з ним алмазних зерен. Обидва ці процесу взаємозалежні і залежать від розмірів алмазних зерен і міцності їхнього закріплення в зв'язуванні шліфувального круга, а також від величини зазору, що утвориться між електродами. Виступаюче зі зв'язування алмазне зерно в процесі оголення входить у контакт з електродом-інструментом, залишаючи на її поверхні слід з розмірами, що відповідають глибині врізання. У свою чергу зусилля, що виникають при контакті алмазного зерна, утворять у місцях його закріплення критичні напруження, що приводять до вирву алмазного зерна зі зв'язування круга.
Механічні процеси дуже впливають на параметри спрофілюючого круга. Так, у процесі видалення алмазних зерен формується мікропрофіль поверхні, що ріже, що згодом характеризує точність, що ріже здатність і стійкість круга.
2 Сучасні методи електроерозійної обробки при шліфуванні твердих матеріалів
У процесі виправлення усувається погрішність установки шліфувального круга на фланці і закріплення останніх на шпинделі верстата, надається кругу задана геометрична форма, формується необхідний мікропрофіль робочої поверхні, що полягає в забезпеченні необхідної величини виступання алмазних зерен зі зв'язування.
Таким чином, безпосередньо на стадії виправлення закладають визначені показники працездатності круга і якості обробки. Час, затрачуваний на виправлення, збільшує собівартість шліфувальної операції, тому видалення зв'язування й алмазоносного шару в процесі виправлення необхідно здійснювати з максимальною продуктивністю.
Існуючі методи виправлення алмазних кругов на металевих зв'язуваннях по способі впливу на алмазоносний шар можна підрозділити на механічні, хімічні, теплові і комбіновані.
Механічні методи засновані на видаленні зв'язування і сколювання зерен шляхом абразивної обробки. Виправлення алмазних кругов на металевому зв'язуванні абразивними кругами по методу шліфування забезпечує продуктивність до 265 мм3 /хв і має наступні недоліки:
- згладжування робочої поверхні ( виступання зерен, що ріжуть, над зв'язуванням не перевищує 5-10 % розміру зерна ), що приводить до погіршення якості обробленої поверхні і низкою здатності, що ріже, круга
- часткове руйнування зерен, удавлення зерен у зв'язування, розворот зерен у напрямку вектора швидкості виправлення, виривши зерен зі зв'язування;
- висока величина зносу абразивного круга, що складає 1000 %.
Для поліпшення виступання зерен зі зв'язування при виправленні механічним способом пропонується використовувати чашковий інструмент із матеріалу GC 1207V, який містить алмазні зерна. У процесі виправлення алмазні зерна відриваються від правлячого інструмента і, потрапляючи в зазор між зв'язуванням круга і матеріалом правлячого інструмента, за рахунок ефекту притирання інтенсифікують видалення зв'язування навколо алмазних зерен шліфувального круга. Регулювання інтенсивності видалення зв'язування здійснюється зміною потоку СОЖ, а також розміром зерен у правлячому інструменті. Виправлення вільним абразивом, подаваним у зазор між притиранням і поверхнею обертового круга, дозволяє збільшити продуктивність виправлення, забезпечити виступання зерен, що ріжуть, над зв'язуванням, але вимагає модернізації устаткування, готування спеціальних суспензій і використовується в основному для кругов простої форми.
Електрохімічний метод виправлення застосовується досить обмежено, хоча за дослідженнями В.Д. Дорофеєва і Т.В. Тудоскі характеризується високою продуктивністю ( до 1000 мм3/хв ), мінімальним зносом правлячого електрода-інструмента і відсутністю шкідливих побічних впливів на зерна алмаза. Разом з тим, вибірковість процесу вимагає для кожного зв'язування підбор відповідного електроліту, створює труднощі при виправленні на верстатах, що працюють зі звичайної СОЖ, тому що потрібні додаткові системи подачі електроліту і резервуарів для його збереження, не дозволяє забезпечити точність профілю, не усуває биття круга.
Сполучення електрохімічного методу з механічним впливом на зв'язування і зерна дозволяє підвищити продуктивність виправлення і точність профілю круга, довести продуктивність видалення алмазоносного шару при виправленні велико-зернистих кругов до 500 мм3/хв.
Існуючі способи електроерозійного виправлення ЕЕП шліфувальних кругов по способі ініціювання електричних розрядів можна розділити на двох груп: способи безконтактно- і контактно-ерозійного впливу.
У першому випадку, як і при електроерозійній обробці ( ЕЕО ) металів, пробій міжелектродного проміжку (МЕП) відбувається в результаті скипання окремих ділянок рідини і злиття їхній у суцільний канал, а також утворення струмопровідних містків унаслідок перерозподілу твердих металевих включень у рідині (рис. 2.1). При цьому як джерела технологічного струму використовуються генератори типу ВГ-ЗВ, ШГІ, МГІ, а робітничим середовищем є олія, гас і інші органічні рідини.
Електроерозійний метод виправлення має визначені переваги перед іншими методами, обумовлені його специфічними особливостями. Так, наявність зазору між взаємодіючими поверхнями круга й електрода дозволяє здійснювати безконтактне формоутворення з мінімальним зусиллям і зносом правлячого інструмента; вибірковість і дискретність процесу забезпечує необхідну точність обробки і якість поверхні, що ріже; термічний характер електричної ерозії не ставить даний метод у залежність від фізико-хімічних властивостей абразивомістящого матеріалу; кожне абразивне зерно після виправлення оточено зв'язуванням зі зміненою структурою, що має твердість у 1,3-3 рази більшої, ніж твердість подібної структури; термохімічний вплив ерозії так зерна приводить до утворення на зернах ямок і ступіней, що є додатковими крайками, що ріжуть; після електроерозійного виправлення зерна виступають зі зв'язування на 30-45 мкм, що створює більш розвиту поверхню круга і забезпечує здатність круга, що ріже, у 2,5-3 рази вище, ніж після абразивного виправлення. Електроерозійний метод виправлення забезпечує високу продуктивність (від 100 мм3/хв при чистових і до 1000 мм3/хв при чорнових режимах обробки), порівняно високу точність профілю в межах 5-20 мкм і підвищені властивості рельєфу, що ріжуть.
Недоліками електроерозійного методу виправлення є часткова графітизація алмазних зерен під впливом високих температур при розрядах, необхідність модернізації універсального устаткування або застосування спеціальних установок для виправлення, у зв'язку з тим, що механічні режими виправлення відрізняються від режимів звичайного шліфування.
В другому випадку при контактно-ерозійному способі впливу електричні розряди ініціюються або в результаті наявності ковзного контактування мікронерівностей поверхонь електродів, або при стружечному замиканні електродів з наступним порушенням електричних розрядів ( рис. 2.2 ). У цьому случаї як джерела технологічного струму використовуються генератори типу ІТТ, джерела постійного струму. Технологічним середовищем є, як правило, звичайна шліфувальна СОЖ. Електроерозійне виправлення алмазних кругов на металевих зв'язуваннях методом шліфування електрода при використанні водних розчинів СОЖ забезпечують продуктивність виправлення 200 мм3/хв, збільшення в 2,5 рази здатності, що ріже, у порівнянні з абразивним виправленням.
1 - електрод; 2 - канал розряду; 3 - міжелектродне середовище; 4 - зв'язування; 5 - зерно; 6 - ерозія зв'язування; 7 - графітова плівка; 8 - ерозія зерна; 9 - ерозія матеріалу електрода
Рисунок 2.1 - Схема процесу електроерозійної обробки струмопровідного абразивомістящого шару
1 - електрод; 2- середовище; 3 - зерно; 4 - алмазно-абразивний інструмент; 5 - стружка; 6 - мікродуговий розряд
Рисунок 2.2 - Схема виправлення від джерела постійного струму
За рахунок електроерозійного виправлення на кругах зернистості 100/80 - 250/200 може бути досягнутий різновид рельєфу 20— 90 мкм, відхилення від прямолінійності профілю 10-20 мкм, а відхилення від округлості 8-32 мкм.
Таким чином, обидва способи електроерозійного виправлення шліфувальних кругов відрізняються лише способом ініціювання електричних розрядів, засновані на руйнуванні металевого зв'язування електричними розрядами і по фізичній суті аналогічні ЕЕО металів. Тому спочатку проаналізуємо можливі шляхи інтенсифікації ЕЕО.
Відомо, що при ЕЕО виникають різні виду імпульсів; холості, робочі, фіктивні і короткі замикання (КЗ). Вид імпульсів залежить від величини міжелектродного проміжку і визначає продуктивність електроерозійного видалення оброблюваного матеріалу. Розглянемо вплив величини МЕП на види імпульсів і продуктивність електроерозійної обробки на прикладі рис. 1.1, побудованого за даними роботи Б.Г. Гутніна.
| |
| |
1 - електрод; 2 - ізоляційне покриття; 3 - канал для підведення СОЖ
Рисунок 1.4 - Електроди-інструменти для профілювання поверхні (виправлення) по методу обгинаючої поверхні алмазного круга
Як видно з приведених графіка, у міру збільшення зазору від Qmin зменшується число імпульсів КЗ і росте продуктивність обробки. Існує єдина крапка, що відповідає зазорові α1, у якій через МЕП проходить 100 % робочих імпульсів і, якби при 100%-ном використанні імпульсів, можливому тільки при високій концентрації продуктів ерозії, не зникала і " здатність, що евакуює," МЕП, цій крапці повинна була б відповідати і максимальна продуктивність. Однак, унаслідок того, що при 100%-ном використанні імпульсів можливе виникнення коливального режиму сервопривода, максимальна швидкість знімання відповідає 5-10 % холостих імпульсів при відсутності імпульсів КЗ. При подальшому збільшенні зазору а>а2, коли круговькість холостих імпульсів перевищує 5-10 %, продуктивність починає падати.
Таким чином, здійснюючи керування процесом ЕЕО з урахуванням видів одиничних імпульсів, можна, через універсальність методу, значною мірою зменшити трудомісткість пошуку режимів, що забезпечують максимальну продуктивність електроерозійної обробки.
Останнім часом запропоновані різні системи автоматичного регулювання процесу ЕЕО, засновані:
- на коефіцієнті використання імпульсів;
- на функції процентного вмісту імпульсів КЗ або залежності співвідношення робочих і аномальних розрядів;
Крім того, відомі способи керування абразивно-електроерозійною обробкою з використанням імпульсів КЗ.
Разом з тим, використовувати відомі способи керування ЕЕО з урахуванням видів імпульсів для керування процесом електроерозійного виправлення шліфувальних кругов не представляється можливим через наступні особливості електроерозійного виправлення:
- при виправленні анодом служить алмазоносний шар, що має неоднорідну структуру - струмонепроводні алмазні зерна розташовані в струмопровідному зв'язуванні; при ЕЕО оброблюваний матеріал представляє однорідну структуру;
- продуктивність виправлення визначається як інтенсивність електроерозійного видалення зв'язування, так і механічного руйнування зерен; при ЕЕО продуктивність обумовлена тільки електроерозійними процесами;
- при виправленні відбувається зшліфовання матеріалу катода алмазними зернами, що перешкоджають зменшенню МЕП, у той же час при ЕЕО можливо зменшення зазору аж до зіткнення поверхні електродів.
На продуктивність ЕЕО впливають властивості технологічного середовища і матеріал електрода, площа обробки, вихідна потужність джерела технологічного струму.
3 Методика реєстрації одиничних імпульсів і їх класифікація
При дослідженні взаємозв'язку видів одиничних імпульсів з механічними режимами електроерозійного виправлення і продуктивністю видалення алмазоносного шару запис одиничних імпульсів струму і напруги здійснювали за допомогою осцилографа Н115 (рис.3.1). Для цієї мети послідовно до гальванометрів осцилографа були підключені додаткові опори: R1 = 30 Ом, R2 = 470 Ом, R3 = 100 Ом - до гальванометра для запису імпульсів струму; R4 = 47 кому і R5 = 5 кОм - до гальванометра для запису імпульсів напруги.
Для виміру інтегральних електричних характеристик процесу електроерозійного виправлення Іср і Ucp використовувалися додаткові амперметри РА1 (0-25 А), РА2 (0-5 А) і вольт-метр PV1 (0-12 В). Підключення приладів і гальванометрів осциллографа G1 до G2 здійснювалося за приведеною схемою (рис. 3.1). Запис здійснювався на осцилографічний фотопапір MC-2-135, швидкість протягання 5000 мм/с.
Записані одиничні імпульси візуально класифікували на чотири види: холості, робочі, імпульси часткового короткого замикання (ЧКЗ) і короткого замикання (КЗ) (рис. 3.2,а,б,у, г), керуючись їхніми визначеннями, приведеними в ДСТ 25331-82, а також у посібнику з експлуатації до блоків харчування ІТТ-35 і ІТТ-9 до алмазно-ерозійних верстатів.
У процесі електроерозійного виправлення робітниче середовище ( 0,3%-ный водний розчин кальцинованої соди ) являє собою слабкий електроліт, а при виникненні механічного контакту між зв'язуванням круга і поверхнею електрода-інструмента відбувається їхнє відносне переміщення зі швидкістю 30-35 м/с. Тому для уточнення форми неодружених імпульсів і імпульсів короткого замикання були проведені спеціальні експерименти.
Перед записом імпульсів неодруженого ходу поверхня ЕІ шліфувалася без подачі на врізання до припинення електричних розрядів. Після цього, не припиняючи обертання шліфувального круга і подачі робітничого середовища, записували імпульси. В описаних умовах неодружений імпульс характеризувався проходженням струму малої амплітуди і відсутністю "підсадження" у вершини імпульсу напруги ( рис. 3.2,а )
а - підключення гальванометрів для запису імпульсів струму й амперметрів;
б - підключення гальванометрів для запису імпульсів напруги і вольтметра
Рисунок 3.1 - Схема підключення гальванометрів осцилографа Н115 і приладів
| |
а) холості; б) робочі; в) часткового короткого замикання; г)короткого замикання
Рисунок 3.2 - Види одиничних імпульсів при виправленні круга в середовищі слабкого електроліту
Імпульси короткого замикання записували при шліфуванні електрода навкруги, на поверхні якого зерна були закриті зв'язуванням. У цьому випадку імпульс КЗ характеризується високим значенням струму і низькою напругою, причому імпульс напруги має характерну закруглену форму ( рис. 3.2,г).
Робочі імпульси при ЕЕП у залежності від умов стружечного замикання мають різну форму й амплітуди струму і напруги ( рис. 3.2,б), а імпульси ЧКЗ характеризуються дробленням імпульсу напруги і високих значень величини струму ( рис. 3.2,в). Дроблення імпульсу напруги говорить про те, що наявне під час імпульсу ЧКЗ коротке замикання ліквідується за час дії цього ж імпульсу.
Після класифікації видів одиничних імпульсів, записаних при проведенні експериментів, визначалася їхня круговькість по видах, якою і характеризувався досліджуваний режим виправлення.
Цей процес, як ми бачимо, дуже трудомісткий і вимагає багато часу, щоб одержати інформацію про якість проведеного виправлення. Потрібно автоматизувати цей процес з наступним висновком результатів на екран рідкокристалічного індикатора. Так само буде здійснюватися управління електродом у залежності від інформації про проведене виправлення.
4 Розробка функціональної схеми для системи автоматичного керуванняположенням електрода при виправленні алмазного круга
Розроблена функціональна схема приведена на рис 4.1 : К – компаратори, Т – RS-тригери, БОН – блок опорних напруг, МК – мікроконтролер, РКІ – рідкокристалічний індикатор.
Для безпеки нашої системи від небажаного перепаду напруги або збільшення струму ми підключаємося до вольтметра, що показує присутність імпульсів між електродом і алмазним кругом. При натисканні на кнопку на кнопку «ПУСК» на клавіатурі МК усі лічильники обнуляются, і система автоматичного контролю починає свою роботу.
Вхідний сигнал знімається між електродом і алмазним кругом. Ця імпульсна напруга подається на вхід кожного з 3-х компараторів. На інший вхід компаратора подається постійна напруга 15В, 30В и 45В, щоб порівнювати вхідний імпульс з наявним сигналом і розподілити імпульси по типах. Якщо вхідний імпульс перевищує 45В, значить це імпульс неодруженого ходу, більш 30В – робочий імпульс, більш 15В – імпульс короткого замикання.
RS тригери, формувач дозволу рахунка і скидання тригерів і шифратор забезпечують почергове зчитування імпульсів, при влученні сигналів на входи S тригерів з компараторів ми одержуємо визначену логічну комбінацію на виході, що враховуємо за допомогою шифратора.
Шифратор, одержавши визначену логічну комбінацію, дозволяє нам розподілити імпульси по видах і передати них у МК для подальшої обробки. За допомогою МК і розробленого програмного забезпечення обробляється результат і виводиться на екран РКІ.
МК при одержанні імпульсів у круговькості 999 зупиняє прийом і починає обробку результатів. Він розраховує процентний уміст кожного виду імпульсів від загального числа, порівнює отриманий результат з нашим обраним критерієм оптимального виправлення. Після порівняння, якщо в нас є відхилення від нашого критерію, програмне забезпечення прораховує на скруговькох потрібно зрушити електрод, щоб одержати оптимальне виправлення і видає серію імпульсів на кроковий двигун, що і керує електродом. Це дуже полегшить задачу оператора верстата і за мінімальні терміни буде проведене якісне виправлення алмазного круга електроерозійним методом.
| | |||
| | |||
Рисунок 4.2 – Часова діаграмма роботи тригеров, компараторів і формувача
На рис 4.2 представлена часова діаграма роботи елементів логіки і формувача дозволу рахунка і скидання тригерів і їхнє поводження щодо різних видів імпульсів: ХХ – імпульс холостого ходу, Робочий імпульс, КЗ – імпульс короткого замикання. На виходах тригерів ми одержуємо визначений логічний результат, що подається на шифратор. Складемо таблицю логічних результатів для шифратора. Позначимо виходи з тригерів: Т1 – x1, Т2 – x2, Т3 – x3, а виходи із шифратора: y1, y2, y3, y4. y1 – присутність імпульсу або загальні імпульси, вона завжди буде дорівнює «1» при наявності імпульсу.
Таблиця 4.1 - Логічні результати дешифрувача
| Виходи триггеров | Виходи дешифрувача | Вид імпульса | |||||
| X1 | X2 | X3 | Y1 | Y2 | Y3 | Y4 | |
| 1 | 1 | 1 | 1 | 0 | 0 | 1 | ХХ |
| 1 | 1 | 0 | 1 | 0 | 1 | 0 | Рабочий |
| 1 | 0 | 0 | 1 | 1 | 0 | 0 | КЗ |
Таким чином, одержуем код на виході дешифрувача, який подаєм на МК.
5. Технічна реалізація
Для виділення імпульсів різної амплітуди буде потрібно трансформатор, що давав з перемінної напруги 220 В и частотою 50 Гц ~ 9 В.
5.1 Розрахунок ланки імітації імпульсів різної амплітуди
Рисунок 5.1 – Ланка імітації імпульсів різної амплітуди
На вхід 1 із трансформатора подається імпульсна напруга рівне В, у крапці 2 нам потрібно одержати напругу 1 В. Значить напруга на резисторі R1=12 В, а на R2=1 В. Для цього нам підійде діод 2Д509А, у нього номінальний струм Iном = 0,1 А. Розрахуємо необхідний нам струм для резисторів:
,(5.1)
Отже:
;(5.2)
. (5.3)
Вихід 3 міняється в межах від 0.. 1 В и подається на всі позитивні входи трьох компараторів. На четвертий компаратор подається на негативний вхід, тому що для формувача нам потрібний інвертований сигнал.
5.2 Розрахунок блоку опорних напруг
|
Рисунок 5.2 – Блок опорних напруг
Опорні напруги потрібні для постійної напруги, щоб їхня амплітуда була постійної, інакше одержимо помилкову інформацію про імпульси на виході. Щоб згладити імпульсна напруга потрібний діодний міст. Виберемо діодний міст КЦ 407:
Рисунок 5.3 – КЦ 407
У нього параметри Iпр мах=0,5 А и Iпр і мах=2 А.
Але діоди тільки зменшують амплітуду, а не встановлюють неї на постійний рівень. Значить знадобитися ще випрямувач напруги, щоб на виході вийшов сигнал рівний +5 В постійної напруги і для його підживлення потрібні конденсатори номіналом 220 мкф*45 В и 100 пф.
Виберемо випрямувач КРЕН5А, що дозволить нам одержати на виході +5 В постійної напруги.
Для індикації харчування нам буде потрібно світлодіод з резистором.
Підійде будь-який світлодіод, тільки щоб номінальний струм світлодіода був дорівнює , отже можна розрахувати номінал резистора R3, знаючи що на діоді упаде 2,5 В:
. (5.4)
Установимо межі опорної напруги для компараторів:
| |
Рисунок 5.3 – Межі опорної напруги
Щоб одержати обрані межі опорної напруги потрібно поставити дільники з резисторів визначеного опору.
Нехай сумарний опір дільника буде дорівнює 70 кОм, тоді розрахуємо струм для дільника:
. (5.5)
Тепер маючи струм для дільника і межі напруги для кожного входу компаратора, значить можна розрахувати резистори. Почнемо з R8:
. (5.6)
Виберемо номінал опору R8 рівний 2 кОм.
Розрахуємо R7:
. (5.7)
Виберемо номінал опору R7 рівний :
. (5.8)
Розрахуємо R6:
. (5.9)
Розрахуємо R5:
. (5.10)
Розрахуємо R4:
. (5.11)
5.3 Вибір компараторів
Рисунок 5.4 – Чотири компаратори в одній схемі LM339N
Три компаратори служать для розподілу сигналу, четвертий потрібний для формувача, що описан нижче.
Сигнал, що подається на позитивний вхід компаратора, порівнюваний з еталонним, котрий подається з блоку опорних напруг, і якщо він більше по напрузі еталонного, тоді на виході маємо логічну одиницю, тобто +5 В, як показано на рис 5.5.
Рисунок 5.5 – Часова діаграма роботи компаратора
Таким чином, на виходах компараторах маємо визначений код з логічних нулів і одиниць, що подається на тригери.
5.4 Вибір тригерів і принцип їхньої роботи
Скористаємося мікросхемами КМОП. Серед них присутні усі види тригерів: RS, D і JK.
Виберемо мікросхему ДО561ТР2, що містить чотири RS-тригери (DD1.1 – DD1.4), що дуже зручно при нагромадженні 4-х розрядних двоїчних слів. Виходи кожної засувки мають третій Z-стан. Сигнал дозволу - загальний для четвірки тригерів подається на вхід EI. Якщо на цьому вході нульовий рівень, виходи розмикаються (переходять у Z-стан).
| |
а - схема однієї RS-засувки з входом дозволу EI; б – цоколівка
Рисунок 5.6 – Мікросхема ДО561ТР2
Кожен тригер складається з RS-засувки (два інвертори ИЛИ-НІ), інвертора і ключа комутації КК, що керується від шин Е и Е-НІ, що поєднують усі чотири канали. Тригер має два входи даних R і S. Усі стани триггерного каналу зведені в табл. 5.2. Низькі рівні на входах S і R не змінюють стан виходу Q. Якщо S=l і R=l, тригер цю інформацію не засувуваїть, але на виході Q транслюється сигнал S=l (поки він присутній). Час затримки поширення сигналу для тригера ДО561ТР2 не перевищує 200 нс, час переходу до стану Z не більш 100 нс.
Застосування RS-засувок дозволяє усунути наслідку дребезга, що виникає при переключенні контакту S1, тобто можливі помилкові імпульси запису одиниці в логічний пристрій. Застосувавши RS-тригер і двухполярний перемикач S1, одержимо на виході гарантований єдиний імпульс запису.
Таблиця 5.2 – Усі стани триггерного каналу
| Вхід | Виходи Qn | ||
| EI | Sn | Rn | |
| H | x | x | Z |
| B | B | H | B |
| B | H | B | H |
| B | B | B | QSB |
| B | H | H | Не міняється |
Нам знадобиться тільки три тригери з цієї мікросхеми, тому що в нас три виходи з компараторів. Усі три виходи тригерів підключені до дешифрувача.
5.5 Проектування формувача скидання тригерів і дозволу рахунка
Рисунок 5.7 – Схема формувача
Часова діаграма даного формувача представлена на рис 5.8.
Рисунок 5.8 – Тимчасові діаграми роботи формувача
У цій схемі використовували мікросхему КМОП логіки ДО561ЛН1, що містить у собі шість стробуючих інверторів (рис. 5.9). Кожен інвертор (точніше, двухвхідный елемент АБО-НІ) має вхід Dn і вихід Qn. Крім того, на другі виходи всіх шести інверторів від загального висновку 12 (дозвіл по входу EI) подається сигнал, що дозволяє, з активним низьким рівнем. Якщо тут вхідний рівень високий, входи Dn забороняються, а усі виходи Qn мають низький вихідний сигнал.
Другий загальний вхід керування E0 – дозвіл по виходу при високому вхідному рівні переводить усі висновки в стан Z (тобто розімкнуто; вихідний опір більш 10 МОм). Третій стан спрощує роботу виходів інверторів на шину даних. Навантажувальна здатність кожного з інверторів – два Ттл-входа (Івых0=3,2 мА). Дана мікросхема придатна для переходу до пристроїв ТТЛ. Мікросхема ДО561ЛН1 працює як від напруги 15 В, так і від колекторного U=5 В.
Таблиця 5.3 - Стан входів і виходів інверторів у мікросхемі ДО561ЛН1
| Дозвіл | Вхід Dn | Вихід Qn | |
| По выходу ЕО | По входу Е1 | ||
| Н | Н | Н | У |
| Н | Н | У | Н |
| Н | У | х | Н |
| У | х | х | Z |
Ми будемо використовувати цю мікросхему просто як інвертори, Е1 – завжди буде дорівнює логічному «0», а ЕО – завжди буде дорівнює логічної «1».
5.6 Проектування дешифрувача
Для реалізації дешифрувача для нашого конкретного випадку буде потрібно мікросхема ДО561ЛА7 і ще одна ДО561ЛН1, тільки вона буде працювати в іншому режимі. Мікросхема ДО561ЛН1 буде в цьому випадку працювати як буфер із загальним дозволом (рис 5.9).
Рисунок 5.9 – Схема дешифрувача
Е0 буде завжди дорівнює логічної «1», а на Е1 буде подаватися імпульс, що дозволяє, з формувача дозволу рахунка з невеликою затримкою. Затримка нам потрібна для того, щоб рахунок починався не на початку наростання реального імпульсу, а наприкінці – коли тригери вже установилися у визначеному значенні.
Таблиця 5.4 - Логічні результати дешифратора
| Виходи тригерів | Виходи дешифрувача | Вид імпульсу | |||||
| X1 | X2 | X3 | Y1 | Y2 | Y3 | Y4 | |
| 1 | 1 | 1 | 1 | 0 | 0 | 1 | ХХ |
| 1 | 1 | 0 | 1 | 0 | 1 | 0 | Робочі |
| 1 | 0 | 0 | 1 | 1 | 0 | 0 | КЗ |
Виходи дешифрувача подаються на порт С мікроконтролера.
5.7 Вибір мікроконтролера
8-bit AVR Мікроконтролер з 4K/8K внутришньосхемною програмувальною FLASH-пам'яттю AT90S8515 Відмінні риси
• AVR RISC архітектура - архітектура високої продуктивності і малого
енергоспоживання
- 118 могутніх команд - більшість однотактових виконань
- 32 8-бітних універсальних робітників регістра
- Продуктивність до 8 мільйонів операцій у секунду при 8 MHz
• ЗУ даних і енергонезалежне ЗУ програми
- 4/8 Кбайт внутришньохемної перепрограмувальної FLASH-пам'яті програм,
ресурс: 1000 циклів стирання/запису
-256/512 байт SRAM
-256/512 байт убудованої EEPROM,
ресурс: 100000 циклів стирання/запису
- Програмувальний захист Flash і EEPROM пам'яті
• Периферія
- 8-бітний таймер/лічильник з окремим попереднім дільником
-16-бітний таймер/лічильник з окремим попереднім дільником,режимами
захоплення/порівняння і подвійним ШІМ з розрядністю 8 -, 9- або 10-битий
- Вбудований аналоговий компаратор
- Програмувальний сторожовий таймер з вбудованим генератором
- Програмувальний канал UART
- Ведучий/відомий SPI послідовний інтерфейс
• Спеціальні функції
- Режим енергозбереження Idle і PowerDown
- Зовнішні і внутрішні джерела переривань
• Специфікація
- Високошвидкісна низькоспоживна CMOS технологія
- Цілком статичне функціонування
• Споживана потужність при 4 МГц, 3V, 25 ° C
- Активний режим: 3.0 m
- Режим Idle: 1.0 m
- Режим Power Down: < 1µA
• Уведення - висновок
- 32 програмувальні лінії введення - висновку
- Корпус PDIP з 40 висновками, PLCC і TQFP з 44 висновками
• Робочі напруги
- 2.7 - 6.0V (AT90S4414-4 і AT90S8515-4)
- 4.0 - 6.0V (AT90S4414-8 і AT90S8515-8)
• Частотний діапазон
- 0 - 4 МГЦ (AT90S4414-4 і AT90S8515-4)
- 0 - 8 МГЦ (AT90S4414-8 і AT90S8515-8)
Рисунок 5.10 - AT90S4414/8515
AT90S4414/8515 є 8-розрядними CMOS мікроконтролерами з AVR удосконаленої RISC архітектурою. Виконуючи більшість команд за один тактовий цикл, мікроконтролери AT90S4414/8515 забезпечують продуктивність 1 MIPS на кожен мегагерц тактової частоти, що дозволяє розроблювачам оптимізировать споживання, що залежить в основному від тактової частоти.
Рисунок 5.11 - Блок-схема AT90S4414/8515
AVR ядро базується на удосконаленої RISC архітектурі з реєстровим файлом швидкого доступу, що містить 32 регістра загального призначення, безпосередньо зв'язаних з арифметико-логічним пристроєм (ALU), і могутньою системою команд. За один тактовий цикл із реєстрового файлу витягаються два операнда, виконується команда і результат записується в регістр призначення. Така високоефективна архітектура забезпечує продуктивність майже в десять разів більшу, ніж стандартні CISC мікроконтролери.
Контролери AT90S4414/8515 мають у своєму розпорядженні наступні можливості: 4/8 Кбайт внутрісистемно програмувальної Flash пам'яті програм, 256/512 Кбайт EEPROM даних, 256/512 Кбайт SRAM даних, 32 лінії I/O загального призначення, 32 робітників регістра загального призначення, гнучкі таймери/лічильники з режимами порівняння, внутрішні і зовнішні переривання, програмувальний послідовний UART, програмувальний сторожовий таймер з убудованим генератором, послідовний SPI порт і два програмно встановлюваних режиму енергозбереження. У режимі Idle зупиняється центральний процесор, але продовжують працювати SRAM, таймери/лічильники, порт SPI і система переривань. У режимі Power Down зберігається вміст регістрів, але зупиняється тактовий генератор і до надходження сигналу переривання або апаратного скидання забороняється виконання усіх функцій мікроконтролера. Мікроконтролери виготовляються за технологією енергонезалежної пам'яті фірми Atmel. Убудована внутрісистемно програмувальна Flash пам'ять програм може бути перепрограмована безпосередньо в системі з використанням послідовного SPI інтерфейсу або за допомогою звичайних програматорів. Об'єднавши 8-розрядне RISC CPU із внутрісистемно програмувальної Flash пам'яттю великого обсягу, фірма створила сімейство могутніх мікроконтролерів, що забезпечують реалізацію недорогих і дуже зручних рішень для великої круговькості застосувань, що вбудовуються. Сімейство AT90S4414/8515 підтримується великою круговькістю засобів розробки програм і систем, що включають: З-компілятори, макроасемблери, відлагодники/симулятори, внутрісхемні емулятори й відлагодничі пристрої.
Призначення виводів:
VCC
Напруга живлення
GND
Земля
Port A (PA7..PA0)
Порт А - 8-розрядний двонаправлений порт уведення-виводу. До виходів порту можуть бути підключені убудовані що підтягують резистори (окремо до кожного розряду). Вихідні буфери забезпечують струм, що втікає, 20 ма і здатні прямо керувати світлодіодними індикаторами. При використанні висновків порту як входи й установці зовнішнім сигналом у низький стан, струм буде випливати з висновків тільки при підключених убудованих резисторах, що підтягують. У процесі скидання висновки порту А переводяться у високоімпедансний стан (навіть при відключеному тактовому генераторі). Порт A при наявності зовнішньої SRAM використовується в якості мультиплексируючої шини адреси/даних.
AT90S4414/8515
Порт B (PB7.. PBO)
Порт B 8-розрядний двонаправлений порт уведення-висновку з убудованими навантажувальними резисторами. Вихідні буфери забезпечують струм, що втікає, 20 ма. При використанні висновків порту як входи й установці їхнім зовнішнім сигналом у низький стан, струм буде випливати з висновків тільки при підключених убудованих навантажувальних резисторах. У процесі скидання висновки порту B переводяться у високоімпедансний стан (навіть при відключеному тактовому генераторі). Порт B використовується також при реалізації різних спеціальних функцій.
Порт С (PC7.. PCO)
Порт ІЗ - 8-розрядний порт уведення-висновку. Вихідні буфери забезпечують струм, що втікає, 20 ма. Порт C використовуються також як виходи адреси при використанні зовнішньої SRAM. При використанні висновків порту як входи і установці їхнім зовнішнім сигналом у низький стан, струм буде випливати з висновків тільки при підключених убудованих навантажувальних резисторах. У процесі скидання висновки порту C переводяться у високоімпедансний стан (навіть при відключеному тактовому генераторі).
Порт D (PD7.. PDO)
Порт D - 8-розрядний двонаправлений порт уведення-висновку з убудованими навантажувальними резисторами. Вихідні буфери забезпечують струм, що втікає, 20 ма. При використанні висновків порту як входи й установці їхнім зовнішнім сигналом у низький стан, струм з висновків буде випливати тільки при підключених убудованих навантажувальних резисторах. Порт D використовується також при реалізації різних спеціальних функцій. У процесі скидання висновки порту D переводяться у високоімпедансний стан (навіть при відключеному тактовому генераторі).
RESET
Вхід скидання. Низький рівень на цьому висновку тривалістю більш 50 ns генерує сигнал скидання мікроконтролера, навіть при зупиненому тактовому генераторі. Можливість організації скидання більш короткими імпульсами не гарантується.
XTAL1
Вхід підсилювача генератора, що інвертує, і вхід зовнішнього тактировання.
XTAL2
Вихід підсилювача генератора, що інвертує.
ICP
Вхідний контакт захоплення таймера/лічильника 1.
OC1B
Вихідний контакт порівняння в режимі Compare B таймера/лічильника 1.
ALE
Строб дозволу фіксації адреси, використовувана для дозволі зовнішньої пам'яті. Строб ALE використовується для фіксації молодшого байта адреси в засувках адреси протягом першого циклу звертання до пам'яті. Протягом другого циклу при звертанні до даних, висновки AD0- AD 7 використовується як шину даних.
5.8 Вибір рідкокристалічного індикатора
Для розробки підійде РКІ фірми Winstar WH0802A-NGG-CT, в ньому 2 рядка і 8 знакомісць у кожному рядку. Розглянутий РКІ за допомогою стандартного 14-контактного рознімання (табл.5.4) обмінюється інформацією з керуючим мікроконтролером (у нашому випадку з AVR). AVR-мікроконтролер посилає в РКІ команди (табл.5.5), що керують режимами його роботи, і ASCII-кодами виведених символів. У свою чергу, РКІ може посилати AVR-мікроконтролеру по його запиті інформацію про свій стан і дані зі своїх внутрішніх блоків пам'яті.
Таблиця 5.4 - Опис виводів стандартного роз’єму РКІ на базі HD44780
| N | Назва висновку | Опис |
| 1 | VSS | (-) Живлення. 0 V. |
| 2 | VDD | (+) Живлення.+5V. |
| 3 | V0 | Напруга зсуву, що керує контрастністю |
| 4 | RS | Вхід. Високий рівень - Дані; Низький - Команди |
| 5 | R/W | Вхід. Висок-Читання, Низьк-Запис |
| 6 | E | Вхід. Строб, що супроводжує сигнали на шині "команди/дані" |
| 7 | DB0 | Шина "команди/дані" |
| 8 | DB1 | |
| 9 | DB2 | |
| 10 | DB3 | |
| 11 | DB4 | |
| 12 | DB5 | |
| 13 | DB6 | |
| 14 | DB7 |
Три вивода 14-контактного рознімання призначені для подачі живильної напруги і напруги зсуву, що керує контрастністю дисплея. На рис. 5.12 показана схема підключення цих виводів. Ї
Рисунок 5.12 - Схема живлення РКІ
З 11 виводів, що залишилися, 8 (DB0 - DB7) використовуються для організації мультиплексированної шини "команди / дані", і на 3 вивода (RS, R/W, E) AVR-мікроконтролер виставляє керуючі сигнали. На рис.5.13 зображені часові діаграми цих сигналів при записі команд / даних у контролер РКІ. За допомогою сигналу на лінії RS мікропроцесор повідомляє контролерові індикатора про те, що саме передається по шині: команда або дані. Сигнал на лінії Е є стробом, що супроводжує сигнали на шині "команди / дані". Запис інформації в РКІ відбувається по спаду цього сигналу. Потенціал на керуючому висновку R/W задає напрямок передачі даних: запис у RAM індикатора (R/W=0) або зчитування відтіля (R/W=1). Контролер РКІ після прийому байта команди або байта даних вимагає деякого часу (табл. 5.5) для обробки отриманої інформації, протягом якого AVR-мікроконтролер не повинний виконувати нових передач.
Рисунок 5.13 - Запис даних у РКІ
Для того, щоб визначити, коли контролер РКІ закінчить свої внутрішні операції, AVR може опитувати BUSY-прапор індикатора (команда "читання busy-прапора"), що скинеться тільки тоді, коли контролер РКІ звільниться. Другий, більш простий спосіб полягає в тім, що керуючий мікроконтролер, знаючи, скруговьки часу потрібно РКІ на обробку тієї або іншої команди, просто виконує тимчасову затримку після кожної передачі інформації. Якщо під час циклу запису AVR-мікроконтролер передає в контролер індикатора код команди, то цей код записується в регістр команд контролера РКІ, і команда відразу ж починає виконуватися. Якщо AVR-мікроконтролер передає в контролер РКІ дані, що являють собою ASCII-коди відображуваних символів, то вони записуються в буфер даних (DDRAM), що містить 80 осередків (рис. 5.14). При записі або зчитуванні буфера даних звертання здійснюється до осередку, на яку в даний момент указує курсор.
а - однорядковий РКІ, б - двостроковий РКІ
Рисунок 5.14 - Відображення на дисплеї символів, ASCII-коди яких записані в DDRAM
Таблиця 5.5 - Система команд контролера НD4478
| Код | Опис команди | Час виконання команди (fosc= 250кгц) | |||||||||
| RS | R/W | DB7 | DB6 | DB5 | DB4 | DB3 | DB2 | DB1 | DB0 | ||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | Очистити дисплей і установити курсор у нульову позицію (адреса 0) | 82мкс до 1.64мс |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | * | Установити курсор у нульову позицію (адреса 0). Установити дисплей щодо буфера DDRAM у | 40мкс до 1.6мс |
| початкову позицію. Уміст DDRAM при цьому не міняється. | |||||||||||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | I/D | S | Установити напрямок зрушення курсору вправо (I/D=1) або вліво (I/D=0) при записі/читанні чергового коду в DDRAM. Дозволити (S=1) зрушення дисплея разом зі зрушенням курсору. | 40мкс |
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | D | C | B | Уключити(D=1)/виключити(D=0) дисплей. Запалити(C=1)/погасити(C=0) курсор. Зображення курсору зробити миготливої (B=1). | 40мкс |
| 0 | 0 | 0 | 0 | 0 | 1 | S/C | R/L | * | * | Перемістити курсор (S/C=0) або зрушити дисплей (S/C=1) вправо (R/L=1) або вліво(R/L=0). | 40мкс |
| 0 | 0 | 0 | 0 | 1 | DL | N | F | * | * | Установити розрядність шини даних 4 біти (DL=0) або 8 біт (DL=1), круговькість рядків дисплея - одна (N=0) або дві (N=1), шрифт - 5х7 крапок (F=0) або 5х10 крапок (F=1). | 40мкс |
| 0 | 0 | 0 | 1 | ACG | Установка адреси CGRAM. Після цієї команди дані будуть записуватися/зчитуватися до/з CGRAM. | 40мкс | |||||
| 0 | 0 | 1 | ADD | Установка адреси DDRAM. Після цієї команди дані будуть записуватися/зчитуватися до/з DDRAM. | 40мкс | ||||||
| 0 | 1 | B F | AC | Читання стану busy-прапора (BF) і лічильника адреси. | 1мкс | ||||||
| 1 | 0 | Дані | Запис даних у DDRAM або CGRAM. | 40мкс | |||||||
| 1 | 1 | Дані | Читання даних з DDRAM або CGRAM. | 40мкс | |||||||
Буфер даних має більше осередків, чим число знакомісць дисплея. Зміщаючи вікно індикатора щодо буфера даних (див. систему команд), можна відображати на дисплеї різні області буфера. У двострокових індикаторів перші 40 осередків буфера даних, звичайно, відображаються на верхньому рядку дисплея, а другі 40 осередків - на нижньому рядку. Зрушення вікна дисплея щодо буфера даних для верхнього і нижнього рядків відбувається синхронно. Курсор буде видний на індикаторі тільки в тому випадку, якщо він потрапив у зону видимості дисплея (і якщо попередньо була подана команда відображати курсор). Крім DDRAM, контролер РКІ містить ще один блок пам'яті - знакогенератор. Його "прошивання", тобто відповідність ASCII-кодів накресленню символів. Приклад такого "прошивання" представлений у рис 5.16. Знакогенератор складається з двох частин. Основна його частина являє собою ПЗУ (CGROM) і неї, отже, не можна змінити. Друга частина, у якій задаються накреслення символів для перших 16-ти кодів таблиці знакогенератора, являє собою перепрограмувальне ОЗУ(CGRAM). Мається можливість задати накреслення 8 символів, що відповідають кодам 0(8), 1(9), 2(10)... 7(15). Для кожного з восьми перепрограмувальних символів у CGRAM приділяється по 8 комірок пам'яті, кожна з яких відповідає одному рядкові крапок у зображенні символу. Таким чином, перепрограмувальна частина знакогенератора містить 64 байта пам'яті (8х8). Приклад кодування CGRAM для однієї букви приведений на рис. 5.15.
Рисунок 5.15 – Приклад кодування символу
Рисунок 5.16 – Відповідність ASCII-кодів накресленню символів
5.9 Вибір двигуна
Для управління кроковим двигуном у нашому випадку передбачено використання двох типів двигуна:
- синхронний двигун;
- кроковий двигун.
У разі використання крокового двигуна для управління електродом найбільш підходить двигун типа ШД-300-300 трьохфазний.
Технічні характеристики двигуна ШД-300-300:
- напруга живлення – 24В;
- частота живлячої мережі – 50Гц;
- споживаний струм – 1,3 А;
- один крок двигуна – 3°;
- круговькість кроків у секунду – 300;
Рисунок 5.17 – Порядок чергування імпульсів напруги двигуна.
Управління цим двигуном представлене у дипломному проекті студентки Семидоцької Т. В. за темою „Спроектувати автоматичну систему дискретної реєстрації поверхні алмазного круга на персональному комп’ютері”
6. РОЗРОБКА ПРОГРАМНОГО ЗАБЕСПЕЧЕННЯ
Програмне забезпечення - це сукупність програм для реалізації розробленої системи на базі використання засобів обчислювальної техніки.
Однією з складових частин програмного забезпечення є операційна система, яка призначена для розширення функціональних можливостей обчислювального обладнання, контролю і управління процесами обробки даних, автоматизації роботи програмістів.
Так, зокрема, Windows ХР, яка використовувалась при розробці та тестуванні програми, являє собою високопродуктивну, багатозадачну і багатопотокову 32-розрядну операційну систему з зручним графічним інтерфейсом і розширеними мережевими можливостями. Операціійна система розроблена фірмою Microsoft (США). Важливою її особливістю є 32-розрядна архітектура, яка забезпечує більш високу продуктивність системи, знімає багато обмежень на системні ресурси.
Захищений режим, що застосовується в Windows ХР, підтримує роботу системи у випадках збою прикладної програми, що є досить вагомою перевагою над іншими ОС, захищає прикладну програму від випадкового втручання одного процесу в інший, забезпечує певну стійкість до вірусів.
Для розробки програмного забеспечення було застосовано середовище програмування Algorithm Builder for AVR 5.20. Дане середовище забезпечує повний цикл розробки, починаючи від введення алгоритму, включаючи налагодження, і закінчуючи внутрісхемним програмуванням кристала. Ви будете мати можливість розробляти програми як на рівні асемблера, так і на макрорівні, при якому можлива робота з знакоперемінними величинами довільної довжини. Це наближає можливості програмування до мові високого рівня. Графічні технології створення програми розкривають нові можливості для програмістів. Вони дозволяють уводити програми на площині у виді алгоритму з деревоподібною структурою. У результаті вся логічна структура програми стає цілком наочною. Основним призначенням таких технологій є максимальне приведення інтерфейсу розробки до природи людського сприйняття. Освоєння такого середовища набагато простіше, ніж освоєння класичного асемблера. Більш зручний інтерфейс розкриває нові можливості для розробки. По оцінці користувачів, час створення програмного забезпечення скорочується в 3 - 5 разів у порівнянні з класичним асемблером.
Середовище призначене для роботи під ОС Windows 95/98/2000/NT/ME/XP.
Будь-яке програмне забезпечення можна розбити на окремі логічно завершені фрагменти. Як правило, фінальним оператором цих фрагментів є такі оператори як безумовний перехід або повернення з підпрограми, тобто оператори, після яких лінійне виконання програми однозначно припиняється. Розробка програмного забезпечення в середовищі Algorithm Builder зводиться до формування таких блоків, розміщенню їх на площині і встановленню між ними векторних зв'язків з умовних і безумовних переходів.
Елементи алгоритму
Для побудови алгоритму в Algorithm Builder передбачено сім елементів:
FIELD – Поле;
LABEL – Мітка;
VERTEX – Вершина блоку;
CONDITION – Умовний перехід;
JMP Vector – Відносний безумовний перехід;
SETTER – Настроювач периферійних пристроїв;
TEXT – Рядок локального текстового редактора.
Розробка алгоритму
Програма працює за алгоритмом наведеним на рисунку 6.1.
Рисунок 6.1 – Алгоритм роботи програми
Опис інтерфейсу користувача
Після подачі живлення на екран РКІ виводиться напис „натиснить ПУСК”. Після натиснення на кнопку „ПУСК” починається лічба імпульсів. Коли буде пораховане 1000 загальних імпульсів, круговькість імпульсів короткого замикання, робочих та холостих буде виведено на екран РКІ автоматично. Якщо натиснути кнопку „СБРОС” операція повториться. Лістинг програми у додатку В.
7. РОЗРАХУНОК НАДІЙНОСТІ СИСТЕМИ
На етапі проектування визначаються розрахункові показники надійності.
Завдання розрахунку показників надійності полягає в тому, щоб за наявними відомостями про надійність комплектуючих виробів і зв'язки між ними, визначити показники надійності пристрою, що розробляється.
Розрахунок показників надійності пристрою проводитися з метою визначення, чи досяжні задані показники надійності, що розробляється.
Необхідно виконати наближений розрахунок надійності принципової схеми, середній наробіток на відмову повинен не перевищувати 10000 годин, середній час відновлення не більше 1.5 години.
Для наближеного розрахунку надійності приладу необхідно мати наступні дані: номенклатура і круговкість комплектуючих виробів одного вигляду, що входять до складу пристрою, що розробляється, а також статичні дані про інтенсивність їх відмов.
Таблиця 7.1 – Розрахунку показників надійності
| Найменування і тип | Кругов-сть Ni | li *106, 1/ч | Nili*106, 1/ч | Квід, % | MTTRi | Квід* MTTRi |
| ATmega8515 | 1 | 0,001 | 0,001 | 0,000138122 | 0,575 | 7,94202E-05 |
| K561ЛН1 | 2 | 0,68 | 1,36 | 0,187845304 | 0.575 | 0,187845304 |
| К561ЛА7 | 1 | 0,68 | 0,68 | 0,093922652 | 0.575 | 0,093922652 |
| К561ТР2 | 1 | 0,68 | 0,68 | 0,093922652 | 0.575 | 0,093922652 |
| КРЕН5А | 1 | 1,44 | 1,44 | 0,198895028 | 0.4 | 0,198895028 |
| КЦ407 | 1 | 0.12 | 0,12 | 0,016574586 | 0.4 | 0,016574586 |
| С1, С2, С3, С4, С5, С6 (220мк*25B) | 6 | 0.135 | 0,81 | 0,111878453 | 0.3 | 0,111878453 |
| С7, С8, С9, С10, С11, С12 (100пФ) | 6 | 0,135 | 0,81 | 0,111878453 | 0,4 | 0,044751381 |
| С13 (1мкФ) | 1 | 0,135 | 0,135 | 0,018646409 | 0.3 | 0,018646409 |
| С14 (20 пФ) | 2 | 0,135 | 0,27 | 0,037292818 | 0,4 | 0,014917127 |
| КД509А | 1 | 0,03 | 0,03 | 0,004143646 | 0,4 | 0,001657458 |
| R1 МЛТ-0,5-200 ±5% | 1 | 0,07 | 0,07 | 0,009668508 | 0.3 | 0,009668508 |
| R2 МЛТ-0,5-59к ±5% | 1 | 0,07 | 0,07 | 0,009668508 | 0.3 | 0,009668508 |
| R3, R4 МЛТ-0,125-3к ±5% | 2 | 0,07 | 0,14 | 0,019337017 | 0.3 | 0,019337017 |
|
| ||||||
| Продовження табл. 7.1 | ||||||
| R5, R6 МЛТ-0,125-2к ±5% | 2 | 0,07 | 0,14 | 0,019337017 | 0.3 | 0,019337017 |
| R7 МЛТ-0,5-240 ±5% | 1 | 0,07 | 0,07 | 0,009668508 | 0.3 | 0,009668508 |
| R8 переміний (1-20 Ом) | 1 | 0.135 | 0,135 | 0,018646409 | 0.3 | 0,018646409 |
| R9 Trimer 3296 (1к – 10к Ом) | 1 | 0,1 | 0.1 | 0,013812155 | 0.3 | 0,013812155 |
| Кнопки | 2 | 0,05 | 0,1 | 0,013812155 | 0,250 | 0,003453039 |
| Пайки | 193 | 0.01 | 1.93 | 0,024033149 | 0,4 | 0,00961326 |
| Сума |
|
| 7,24 | 1,01 |
| 8,96E-01 |
MTTR i – середня година ремонту, мінімальний час заміни елемента;
- середній час відновлення усього виробу;
. – круговькість відмовлень за мільйон годин усього пристрою (λустр.).
Таким чином, середній час ремонту виробу 0,896 години.
Коефіцієнт експлуатації (в умовах: земля, стаціонарні умови):
Кэ=1,0
Наробіток на відмовлення:
. (7.1)
Відмовлення за тисячу годин:
(ч). (7.2)
Один майстер за тиждень може відремонтувати:
.(7.3)
Круговькість відмовлень за тиждень:
. (7.4)
Круговькість елементів на обслуговування:
(шт). (7.5)
Розрахунок запасних виробів і пристосувань (ЗВП)
Nрасч i – розрахункова круговькість елементів для замовлення:
. (7.6)
Nзаказ – круговькість ЕРЕ що замовляються.
Таблиця 7.2 – Розрахунку ЗВП
| Найменування і тип | Nод.парам | li*106, 1/ч | Nili*106, 1/ч | Nрасч | Nзаказ |
| ATmega8515 | 1 | 0,001 | 0,001 | 0,00876 | 1 |
| K561ЛН1 | 2 | 0,68 | 1,36 | 11,9136 | 12 |
| К561ЛА7 | 1 | 0,68 | 0,68 | 5,9568 | 6 |
| К561ТР2 | 1 | 0,68 | 0,68 | 5,9568 | 6 |
| КРЕН5А | 1 | 1,44 | 1,44 | 12,6144 | 13 |
| КЦ407 | 1 | 0.12 | 0,12 | 1,0512 | 2 |
| С1, С2, С3, С4, С5, С6 (220мк*25B) | 6 | 0.135 | 0,81 | 7,0956 | 8 |
| С7, С8, С9, С10, С11, С12 (100нФ) | 6 | 0,135 | 0,81 | 7,0956 | 8 |
| С13 (1мкФ) | 1 | 0,135 | 0,135 | 1,1826 | 2 |
| С14 (20 пФ) | 2 | 0,135 | 0,27 | 2,3652 | 3 |
| КД509А | 1 | 0,03 | 0,03 | 0,2628 | 1 |
| R1 МЛТ-0,5-200 ±5% | 1 | 0,07 | 0,07 | 0,6132 | 1 |
| R2 МЛТ-0,5-59к ±5% | 1 | 0,07 | 0,07 | 0,6132 | 1 |
| R3, R4 МЛТ-0,125-3к ±5% | 2 | 0,07 | 0,14 | 1,2264 | 2 |
| R5, R6 МЛТ-0,125-2к ±5% | 2 | 0,07 | 0,14 | 1,2264 | 2 |
| R7 МЛТ-0,5-240 ±5% | 1 | 0,07 | 0,07 | 0,6132 | 1 |
| R8 переміний (1-20 Ом) | 1 | 0.135 | 0,135 | 1,1826 | 2 |
| R9 Trimer 3296 (1к – 10к Ом) | 1 | 0,1 | 0.1 | 0,876 | 1 |
| Кнопки | 2 | 0,05 | 0,1 | 0,876 | 1 |
Отже, розрахункові показники надійності пристрою (напрацювання на відмову пристрою MTBF=138121 годин, час відновлення для пристрою MTTR=0,896 години) задовольняє вимогам надійності, що пред'являються пристрою, виходячи з ТЗ (напрацювання на відмову пристрою MTBF= 10000 годин, час відновлення для пристрію MTTR=1.5 години).
8. ТЕХНІКО-ЕКОНОМІЧНЕ ОБҐРУНТУВАННЯ РОЗРОБКИ І ВИРОБНИЦТВА „САУ ПОЛОЖЕННЯМ ПРАВЛЯЧОГО ЕЛЕКТРОДА В ПРОЦЕСІ ЕЛЕКТРОЕРОЗІЙНОГО ВИПРАВЛЕННЯ АЛМАЗНОГО КРУГА”
„САУ положенням правлячого електрода в процесі електроерозійного виправлення алмазного круга” далі прилад, знайде застосування в області металоріжучих і шліфувальних робіт для одержання інформації про стан виправлення алмазного круга і керуванням цим процесом.
Дата: 2019-12-10, просмотров: 366.