Вхідні дані.
Для проектування заданий кулачок з плоским штовхачем. Хід штовхача h=30мм. Кут віддалення φ1=1050 , кут дального стояння φ2=150 , кут наближення φ3= φ1=1050. Закон руху штовхача заданий у вигляді аналогу прискорення, що описано так:  .
.
Визначення закону руху штовхача.
Заданий закон зміни аналога прискорення (див арк. 4)
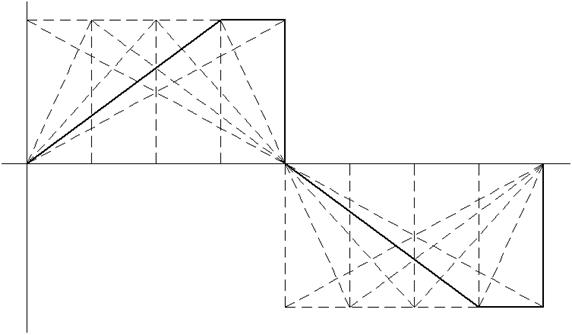
Кути повороту кулачка перенесемо на креслення з масштабним коефіціентом:
Графічно інтегруючи цю діаграмму аналога прискорення, будуємо спочатку діаграму аналога швидкості, а потім і діаграму переміщення тарілки штовхача.
Величини полюсних відстаней при інтегруванні приймемо наступними Н1=45мм, Н2=90мм.
Масштабні коефіціенти діаграм


Визначення мінімального радіуса-вектора профілю кулачка.
Для визначення мінімального радіуса-вектора профілю кулачка будуємо сумарну діаграму перміщення та аналога прискорення(див. арк. 4). Так як rmin повинен перевищувати від’ємну сумму переміщення та аналога прискорення, то з креслення визначаємо найбільшу від’ємну ординату сумарної діаграми
rmin=a·µs+0,01м=38,39·0,00125+0,01=0,058м
Будуємо профіль кулачка (див. арк. 4). З вільно вибраного центру оюертання кулачка (т. О1) описуємо коло радіусом rmin. На вертикальній прямій відкладаємо хід h та від цієї вертикалі відкладаємо фазові кути φ1,2,3,4. Дуги, відповідні кутам φ1 та φ3, ділимо на вісім рівних частин відповідно діленню вісі абцис діаграм руху штовхача. Потім засікаємо радіуси О11’, O12’, O13’, і т. д. дугами кіл з радіусами О11, О12, О13 і т. д. в точках А1, А2, А3 і т. д. Через ці точки проводимо положення штовхача в оберненому русі. Будуємо криву, яка огибає усі положення тарілок штовхача в оберненому русі. Ця крива і буде профілєм кулачка, який відповідає кутам φ1 та φ3.
Для кутів φ2 та φ4 профіль окреслюється дугами кіл радіусів rmin (φ4) та rmin+h(φ2).
ВИСНОВКИ
В результаті виконання курсового проекту зроблені дослідження з структурного, кінематичного, кінетостатичного та енергетичного аналізу конвеєра, синтез важільного механізму конвеєра за коефіцієнтом зміни середньої швидкості вихідної ланки, синтез зубчатого зачеплення і приводу механізму, синтез кулачкового механізму.
Дослідження проводились аналітичним, графоаналітичним та графічним методами. В розрахунках аналітичного метода використовувалось ЕОМ і, конкретно, програм: MECH, ZUB, TEST.
Порівняння здійснювались між результатами розрахунків, отриманими різними методами, похибка не перевищує 5% по відношенню до аналітичного методу.
Синтез зубчатого зачеплення проводився за умовами використання нерівно зміщеного зачеплення, вписування у наперед задану між осьову відстань, забезпечення умови рівно зношеності коліс зачеплення. Креслення проводилось за однією умовою, але з аналізом усіх умов.
При синтезі планетарного редуктора числа зубців його коліс підбирались за допомогою ЕОМ та вручну з використанням умов співвісності, сусідства та складання.
Отримані результати розрахунків можуть бути використані при подальших розрахунках ланок на міцність методами деталей машин, опору матеріалів тощо.
Дата: 2019-05-29, просмотров: 161.