Кафедра ДМ та ПТМ
ПОЯСНЮВАЛЬНА ЗАПИСКА ДО
КУРСОВОГО ПРОЕКТУ З ДИСЦИПЛИНИ
ТЕОРІЯ МЕХАНІЗМІВ І МАШИН
З використанням ЕОМ
МЕХАНІЗМ ВАЖІЛЯ
Розробив
Ст. гр. М-213 А.С. Щербина
Керівник
Асистент С.Ю. Кружнова
Запоріжжя
2005р.
Реферат
Об’єкт дослідження – механізм приводу конвеєра, його планетарній редуктор з відкритою зубчатою передачею та кулачковій механізм із коливальним штовхачем.
Ціль роботи - синтез та аналіз механізму привода конвеєра.
У проекті вирішені такі задачі:
o виконаний структурний аналіз механізму;
o зробленій синтез важільного механізму за заданим коефіцієнтом зміни середньої швидкості повзуна;
o визначені основні кінематичні та динамічні характеристики механізму, момент інерції маховика та дійсний закон руху ланки зведення у вигляді його кутової швидкості і кутового прискорення;
o знайдені реакції у кінематичних парах та зрівноважувальна сила;
o створений синтез зубчатої передачі, планетарного редуктора;
виконаний синтез кулачкового механізму з коливальним штовхачем.
Методи дослідження – графічний, графоаналітичний та аналітичний. Аналітичні методи виконані також за допомогою ЕОМ. Кінетостатичне дослідження методами, переліченими вище, та методом М.Є.Жуковського. Синтез зубчатої передачі та кулачкового механізму виконано графічним та аналітичним методами.
ПЛАНИ ШВИДКОСТЕЙ, ПРИСКОРЕНЬ, СИЛА ТА МОМЕНТ СИЛИ ІНЕРЦІЇ, ЗВЕДЕНА СИЛА, ЗВЕДЕНИЙ МОМЕНТ СИЛИ, ЗВЕДЕНИЙ МОМЕНТ ІНЕРЦІЇ, МАХОВИК, МОДУЛЬ, КОЕФІЦІЄНТ ПЕРЕКРИТТЯ, КОЕФІЦІЄНТ ПИТОМОГО КОВЗАННЯ, КУЛАЧОК, ШТОВХАЧ, КУТ ТИСКУ, ФАЗОВІ ДІАГРАМИ.
Робота виконана на кафедрі ТМ І ТММ Запорізького національного технічного університету.
ВСТУП
Механізм конвеєра використовується у багатьох галузях виробництва для переміщення виробів під час технологічної обробки, складання, контролю тощо.
Створення сучасної машини вимагає від конструктора всебічного аналізу її проекту. Конструкція повинна задовольняти багатьом умовам, які можуть бути у протидії одна до одної. Наприклад, мінімальна динамічна завантаженість повинна узгоджуватись зі швидкохідністю, достатня надійність і довговічність повинна бут забезпечена при мінімальних габаритах і масі. Витрати на виготовлення та експлуатацію повинні бути мінімальними, але забезпечувати досягнення заданих параметрів. З великої кількості можливих рішень конструктор вибирає компромісне рішення з визначеним набором параметрів і проводить порівняльну оцінку різних варіантів. Зараз усі розрахунки виконують за допомогою ЕОМ, що дає можливість оцінювати конструкцію за багатьма критеріями якості і знайти максимум показників якості й ефективності.
Виконання усіх стадій проектування у визначений термін часу неможливо здійснити без втілення методів автоматизованого проектування машин. Навички роботи з ЕОМ використовується у роботі над курсовим проектом з ТММ. Тут використовуються такі програми:
- програма розрахунків для важільних механізмів другого класу;
- програма розрахунків параметрів зубчатого зачеплення;
- програма проектування планетарних редукторів;
- програма проектування кулачкових механізмів;
- програма тестового контролю знань студентів.
Основним є володіння аналітичними, графоаналітичними та графічними методами дослідження механізмів, оцінка отриманих результатів особливо з точки зору якісних показників. Це і є метою роботи.
СИНТЕЗ МЕХАНІЗМУ ВАЖІЛЯ
Для синтезу механізму задані такі дані: довжини ланок 1-4 -01А=115мм, АВ=291мм, О2В=232мм, О2С=290мм, СД=319мм, О1О2=338мм, відстань L6=271мм, а також кути крайніх положень ланки 3.
Треба визначити кут перекриття θ та коефіціент зміни середньої швидкості k.
Так як відомі розміри усіх ланок, то можна побудувати два крайніх положення механізму. Знайдемо кут перекриття з трикутника 01В1В2 .

θ=6о 71′
Звідси знаходимо коефіціент зміни середньої швидкості:
Креслення виконуємо з масштабним коефіціентом μ=0,004. Тобто
О1А=lO1A/μ=0,115м/0,004=28,75мм
АВ=72,75мм
L6=67,75мм
О2С=72,5мм
О2В=58мм
Н=72,5мм
ГРАФО-АНАЛІТИЧНИЙ МЕТОД
Для ланки 2:
 ,
,
де h2 = 0,117 м,
АВ = 0,291 м,
 .
.
І звідси :

Для ланки 3:

де О2В = 0,29 м,
h3 = 0,147 м,
 ,
,
 .
.
І звідси :
 Запишеио векторне рівняння рівноваги сил, що діють на групу Ассура, складену з ланок 2 і 3.
Запишеио векторне рівняння рівноваги сил, що діють на групу Ассура, складену з ланок 2 і 3.
 .
.
Будуємо план сил відповідно до цього рівняння і визначаємо величини та напрямки реакцій  (див. арк. 2). Знайдемо довжини векторів сил на кресленні з масштабним коефіціентом μF=0,007Н/мм.
(див. арк. 2). Знайдемо довжини векторів сил на кресленні з масштабним коефіціентом μF=0,007Н/мм.
Визначаємо з креслення :




Розглянемо рух вхідної ланки. Вхідною ланкою механізму є кривошип 1, який здійснює обертальний рух. Привод у рух цієї ланки здійснюється від електродвигуна через планетарний редуктор і відкриту зубчату передачу коліс 4 і 5. Ланка 1 виконується разом з колесом 5, або жорстко з нею зв’зуються. На зубчате колесо з боку спряженого колеса 4 діє сила, яку називають зрівноважуючою, або рушійною. Накреслимо ведучу ланку разом з колесом 5 (див. аркуш 2).
Число зубів колеса 5 Z5 = 35, колеса 4 Z4 = 16, а модуль зубчатих колес m = 8 мм. З цих даних знайдемо радіусb колес 5 і 4:
r5 = m × Z5 / 2 = 140 мм.
r4 = m × Z4 / 2 = 64 мм.
Зрівноважуючу силу Рзр Прикладаємо в полюсі зачеплення коліс і 5 і направимо по лінії зачепленя, яка складає з дотичною до початкових кіл кут приблизно aw = 24°.
В точці А кривошипа прикладаємо силу реакції R12 з боку ланки 2. Величину та напрямок цієї реакції визначаємо з рівності  .
.
Запишемо векторне рівняння рівноваги сил, що діють на вхідну ланку:
 .
.
Будуємо силовий трикутник відповідно векторного рівняння, з якого візначаємо сили Рзр і R01 ( масштабний коефіціент виберемо рівним μF=77Н/мм ). Тоді
З креслення визначаємо:
Fзр = 41,78*77=3217 Н,
R01 = 63,44*77=4484,88 Н.
СИНТЕЗ ЗУБЧАТОГО ЗАЧЕПЛЕННЯ
Якісні показники зачеплення
Визначення коефіціента перекриття
Коефіціент перекриття, по якому можна судити про плавність передачі:

Коефіціент перекриття показує кількість зубців, що одночасно знаходяться в зачепленні в часі. Коефіціент 1,157 означає, що 15,7% часу зачеплення здійснюється двома парами зубців, а 84,3% часу зачеплення – однією парою зубців.
Визначання коефіціент питомого ковзання
Коефіцієнти питомого ковзання ν4 і ν5 , по судять про відносний знос профілів, визначаємо за формулами:
де АВ – довжина теоретичної лінії зачеплення, мм; Х – поточні значення координати точки зачеплення, виміряне від початкової точки А колеса 4 теоретичної лінії зачеплення, або, інакше, радіус кривизни евольвенти колеса 4, а АВ-Х – радіус кривизни евольвенти колеса 5.
Довжина теоретичної лінії зачеплення:
АВ=а w · sinαw =189,14· sin 26,580=84.63мм
Координату Х приймаємо через кожну 0,1·АВ. Значення коефіціентів питомого ковзання заносимо в таблицю
| хАВ | ν4 | ν5 |
| 0 | -∞ | 1,000 |
| 0,1 | -3,500 | 0,778 |
| 0,2 | -1,000 | 0,500 |
| 0,3 | -0,167 | 0,143 |
| 0,4 | 0,250 | -0,333 |
| 0,5 | 0,500 | -1,000 |
| 0,6 | 0,667 | -2,000 |
| 0,7 | 0,786 | -3,667 |
| 0,8 | 0,875 | -7,000 |
| 0,9 | 0,944 | -17,000 |
| 1 | 1,000 | -∞ |
Визначення умови рівнозношенності.
Якщо точка контакту буде на початку практичної лінії зачеплення, то

Максимальний коефіціент питомого ковзання колеса 4 на ніжки зуба буде

Якщо точка контакта буде в кінці практичної лінії зачеплення, то


Умова рівнозношеності:

Але -1,192 ≠ -1,557, тому умова рівнозношеності не виконується і колесо 5 буде зношуватись швидше.
СИНТЕЗ ПЛАНЕТАРНОЇ ПЕРЕДАЧІ
Визначення передаточного відношення планетарної передачі
Привод механізму парової машини складається з планетарного редуктора і зовнішньої зубчастої передачі коліс 4 і 5. Число обертів ротора двигуна nдв=1500 об/хв., а число обертів вала колеса 5, тобто вала кривошипа nкр=400об/хв.
Загальне пердаточне відношення привода
Передаточне відношення зубчатої пари коліс 4 і 5:
Передаточне відношення планетарного редуктора:
За результатами розрахунку на ЕОМ вибираємо числа зубців коліс редуктора.
Z1=32; Z2=32; Z2’=17; Z3=47; число сателітів К=3.
Перевіримо отримані параметри за умовами забеспечення складання, співвісності та сусідства.
Умова складання
 - умова виконується
- умова виконується
Умова свіввісності
Z1+Z2=Z2’+Z3
32+32=17+47 - умова виконується
Умова сусідства
(32+32)sin600>2
55.42>2 - умова виконується
ВИСНОВКИ
В результаті виконання курсового проекту зроблені дослідження з структурного, кінематичного, кінетостатичного та енергетичного аналізу конвеєра, синтез важільного механізму конвеєра за коефіцієнтом зміни середньої швидкості вихідної ланки, синтез зубчатого зачеплення і приводу механізму, синтез кулачкового механізму.
Дослідження проводились аналітичним, графоаналітичним та графічним методами. В розрахунках аналітичного метода використовувалось ЕОМ і, конкретно, програм: MECH, ZUB, TEST.
Порівняння здійснювались між результатами розрахунків, отриманими різними методами, похибка не перевищує 5% по відношенню до аналітичного методу.
Синтез зубчатого зачеплення проводився за умовами використання нерівно зміщеного зачеплення, вписування у наперед задану між осьову відстань, забезпечення умови рівно зношеності коліс зачеплення. Креслення проводилось за однією умовою, але з аналізом усіх умов.
При синтезі планетарного редуктора числа зубців його коліс підбирались за допомогою ЕОМ та вручну з використанням умов співвісності, сусідства та складання.
Отримані результати розрахунків можуть бути використані при подальших розрахунках ланок на міцність методами деталей машин, опору матеріалів тощо.
Кафедра ДМ та ПТМ
ПОЯСНЮВАЛЬНА ЗАПИСКА ДО
КУРСОВОГО ПРОЕКТУ З ДИСЦИПЛИНИ
ТЕОРІЯ МЕХАНІЗМІВ І МАШИН
З використанням ЕОМ
МЕХАНІЗМ ВАЖІЛЯ
Розробив
Ст. гр. М-213 А.С. Щербина
Керівник
Асистент С.Ю. Кружнова
Запоріжжя
2005р.
Реферат
Об’єкт дослідження – механізм приводу конвеєра, його планетарній редуктор з відкритою зубчатою передачею та кулачковій механізм із коливальним штовхачем.
Ціль роботи - синтез та аналіз механізму привода конвеєра.
У проекті вирішені такі задачі:
o виконаний структурний аналіз механізму;
o зробленій синтез важільного механізму за заданим коефіцієнтом зміни середньої швидкості повзуна;
o визначені основні кінематичні та динамічні характеристики механізму, момент інерції маховика та дійсний закон руху ланки зведення у вигляді його кутової швидкості і кутового прискорення;
o знайдені реакції у кінематичних парах та зрівноважувальна сила;
o створений синтез зубчатої передачі, планетарного редуктора;
виконаний синтез кулачкового механізму з коливальним штовхачем.
Методи дослідження – графічний, графоаналітичний та аналітичний. Аналітичні методи виконані також за допомогою ЕОМ. Кінетостатичне дослідження методами, переліченими вище, та методом М.Є.Жуковського. Синтез зубчатої передачі та кулачкового механізму виконано графічним та аналітичним методами.
ПЛАНИ ШВИДКОСТЕЙ, ПРИСКОРЕНЬ, СИЛА ТА МОМЕНТ СИЛИ ІНЕРЦІЇ, ЗВЕДЕНА СИЛА, ЗВЕДЕНИЙ МОМЕНТ СИЛИ, ЗВЕДЕНИЙ МОМЕНТ ІНЕРЦІЇ, МАХОВИК, МОДУЛЬ, КОЕФІЦІЄНТ ПЕРЕКРИТТЯ, КОЕФІЦІЄНТ ПИТОМОГО КОВЗАННЯ, КУЛАЧОК, ШТОВХАЧ, КУТ ТИСКУ, ФАЗОВІ ДІАГРАМИ.
Робота виконана на кафедрі ТМ І ТММ Запорізького національного технічного університету.
ВСТУП
Механізм конвеєра використовується у багатьох галузях виробництва для переміщення виробів під час технологічної обробки, складання, контролю тощо.
Створення сучасної машини вимагає від конструктора всебічного аналізу її проекту. Конструкція повинна задовольняти багатьом умовам, які можуть бути у протидії одна до одної. Наприклад, мінімальна динамічна завантаженість повинна узгоджуватись зі швидкохідністю, достатня надійність і довговічність повинна бут забезпечена при мінімальних габаритах і масі. Витрати на виготовлення та експлуатацію повинні бути мінімальними, але забезпечувати досягнення заданих параметрів. З великої кількості можливих рішень конструктор вибирає компромісне рішення з визначеним набором параметрів і проводить порівняльну оцінку різних варіантів. Зараз усі розрахунки виконують за допомогою ЕОМ, що дає можливість оцінювати конструкцію за багатьма критеріями якості і знайти максимум показників якості й ефективності.
Виконання усіх стадій проектування у визначений термін часу неможливо здійснити без втілення методів автоматизованого проектування машин. Навички роботи з ЕОМ використовується у роботі над курсовим проектом з ТММ. Тут використовуються такі програми:
- програма розрахунків для важільних механізмів другого класу;
- програма розрахунків параметрів зубчатого зачеплення;
- програма проектування планетарних редукторів;
- програма проектування кулачкових механізмів;
- програма тестового контролю знань студентів.
Основним є володіння аналітичними, графоаналітичними та графічними методами дослідження механізмів, оцінка отриманих результатів особливо з точки зору якісних показників. Це і є метою роботи.
СТРУКТУРНИЙ АНАЛІЗ МЕХАНІЗМУ
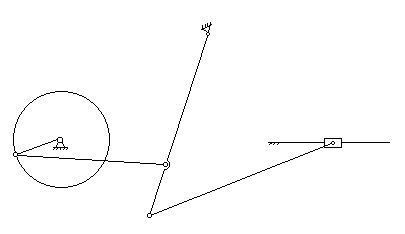
Схема механізму та вхідні дані для дослідження наведені в додатку 1, рисунок 1[14], вариант 5.
О2
3
1 О1 5
А 2
В Д
4
С
Рис 1.1.Механізм важіля
Механізм важіля складається з п’яти ланок, де ланка 1- вхідна і ланка 5- вихідна (повзун). Визначемо основні типи ланок, характер руху, клас і назву кінематичних пар. Результати заносимо в таблицю 1.
Таблиця 1. Характристика ланок і кінематичних пар.
| Ланки механізму | |||
| Позначення | Назва ланки | Характер руху | |
| 0 | Стійка, корпус, станина | Нерухомий | |
| 1 | Кривошип | Обертальний | |
| 2 | Шатун | Плоский | |
| 3 | Коромисло | Обетальний | |
| 4 | Шатун | Плоский | |
| 5 | Повзун | Поступальний | |
| Кількість рухомих ланок механізму n =5 | |||
| Кінематичні пари (КП) | |||
| Позна- чення | Характер відносного руху ланок, що утворюють КП | Номера ланок, що утворюють КП | Клас пари |
| O1 | Обертальна | 0, 1 | 5 |
| А | Обертальна | 1, 2 | 5 |
| О2 | Обертальна | 0, 3 | 5 |
| В | Обертальна | 2, 3 | 5 |
| С | Обертальна | 3, 4 | 5 |
| Д | Обертальна | 4, 5 | 5 |
| Д1 | Поступальна | 0, 5 | 5 |
| Кількість КП 5-го класу р5=7, 4-го класу р4=0 | |||
Усі КП механізму – плоскі і дозволяють відносний рух ланок тільки в одній площині, тому весь механізм плоский.
Ступінь волі визначемо за формулою Чебишева:
W = 3n - 2p5 - p4 = 3*5 - 2*7 – 0 = 1.
Групи Ассура (нульові групи)показані на рисунку 1.2 у порядку їх відокремлення.
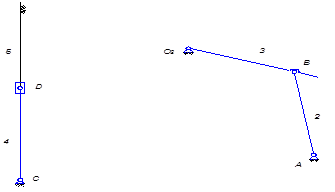
Рис. 1.2. Групи Ассура другого класу і другого порядку
Найвищій клас груп Ассура – другий, одже і увесь механізм другого класу.
СИНТЕЗ МЕХАНІЗМУ ВАЖІЛЯ
Для синтезу механізму задані такі дані: довжини ланок 1-4 -01А=115мм, АВ=291мм, О2В=232мм, О2С=290мм, СД=319мм, О1О2=338мм, відстань L6=271мм, а також кути крайніх положень ланки 3.
Треба визначити кут перекриття θ та коефіціент зміни середньої швидкості k.
Так як відомі розміри усіх ланок, то можна побудувати два крайніх положення механізму. Знайдемо кут перекриття з трикутника 01В1В2 .
θ=6о 71′
Звідси знаходимо коефіціент зміни середньої швидкості:
Креслення виконуємо з масштабним коефіціентом μ=0,004. Тобто
О1А=lO1A/μ=0,115м/0,004=28,75мм
АВ=72,75мм
L6=67,75мм
О2С=72,5мм
О2В=58мм
Н=72,5мм
Дата: 2019-05-29, просмотров: 219.