Под исполнительным уровнем управления понимается организация управления движением отдельно в каждой из степеней подвижности ИУ манипуляционного робота, что, как правило, реализуется последовательным включением исполнительных приводов того или иного сустава манипулятора. Поскольку такое включение может осуществляться со специального пульта оператора (стационарного или выносного), то данный способ относится к дистанционному виду управления манипулятором. При этом в процессе управления человек-оператор как бы формирует команду на включение того или иного привода, обеспечивающего движение соответствующего звена в нужном направлении. Поэтому подобный метод получил название командного управления манипулятором. Схема системы командного управления представлена на рисунке 2.2.
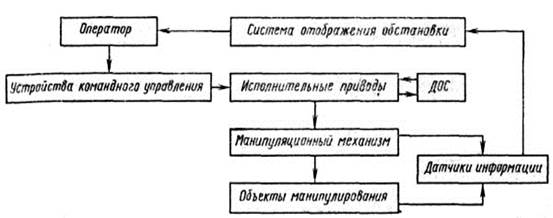
Рисунок 2.2 – Схема управления манипуляционным роботом на исполнительном уровне
Человек-оператор включает исполнительные приводы с помощью специальных устройств командного управления. Наличие датчиков обратной связи (ДОС) по частоте вращения вала двигателя в каждом из приводов позволяет обеспечить регулирование скорости движения звеньев манипуляционного механизма, а следовательно, и рабочего органа, воздействующего на объекты манипулирования.
В том случае, если оператор не имеет возможности непосредственно наблюдать за движениями рабочего органа манипулятора и его взаимодействием с объектом манипулирования, необходимо использовать информационные видеосигналы. Наибольшей эффективностью при восприятии оператором обстановки в рабочей зоне обладают телевизионные системы со стереоскопическим изображением.
Метод командного управления на исполнительном уровне наиболее удобен применительно к транспортным средствам, которые, как правило, работают в прямоугольной системе координат. Этим объясняется широкое использование командного управления и для обеспечения транспортных движений манипуляционного робота при его выводе в рабочую зону.
Командное управление оказалось весьма эффективным и при обучении промышленных роботов процессу выполнения технологических операций. Именно поэтому закономерно оснащение большинства современных промышленных роботов специальным выносным пультом дистанционного командного управления. Формирование траекторий перемещения ИУ робота с помощью подобного пульта позволяет оператору вводить в блок памяти сигналы датчиков положения по каждой степени подвижности без какого-либо дополнительного преобразования и пересчета координат.
Как правило, человек-оператор, имея в руках переносной пульт командного управления, формирует все перемещения робота, непосредственно наблюдая за его движениями. Это обеспечивает высокую точность позиционирования в процессе обучения. Однако командное управление можно осуществлять и при дистанционном наблюдении за процессом работы.
Командное управление на исполнительном уровне оказывается предпочтительным не только для обучения промышленного робота, действующего в автоматическом режиме, но и для управления его действиями в непредвиденных и особенно в аварийных ситуациях. Возникновение сложной ситуации при заклинивании деталей, поломке механизма и т. п. связано с необходимостью перехода с автоматического управления на ручное. И наиболее предпочтительным в этом случае является командное управление на исполнительном уровне. Именно ручное командное управление позволяет обеспечить быстрый вывод манипулятора из сложной ситуации и привести его в исходное положение для дальнейшей работы в автоматическом режиме.
Оснащение промышленных роботов устройствами дистанционного управления на исполнительном уровне существенным образом расширяет функциональные возможности роботов, обеспечивая возможность выполнения сложных, заранее не запрограммированных операций. Фактически такие роботы можно рассматривать как робототехнические системы с комбинированным дистанционно-автоматическим управлением. Устройства командного управления находят широкое применение в робототехнических системах, требующих максимального упрощения вычислительной аппаратуры при обеспечении ее высокой надежности.
Таким образом, командное управление, основанное на введении управляющих сигналов на исполнительном уровне позволяет считать его наиболее простым и надежным методом дистанционного управления, а также удобным способом формирования программ движения исполнительного устройства при обучении промышленного робота.
Дата: 2019-12-10, просмотров: 261.