Методические указания по выполнению практических занятий
| по дисциплине | «Современные компьютерные технологии. Современные компьютерные технологии 0» |
| для направления | 220100.68 «Системный анализ и управление» |
| программа | «Системный анализ проектирования, обеспечения и управления качеством организаций» |
Ижевск
2012
Введение
Целью преподавания дисциплины «Современные компьютерные технологии» для студентов направления 220100.68 «Системный анализ и управление» (программа 220100.68 «Системный анализ проектирования, обеспечения и управления качеством организаций») является теоретическая и практическая подготовка по современным компьютерным технологиям.
Задачи дисциплины:
- изучение современных компьютерных технологий в науке;
- овладение навыками сбора, переработки и представления научно-технических материалов.
Измерения являются одним из основных источников количественной информации об исследуемых объектах самой различной природы. Измерительная техника развивалась и совершенствовалась на протяжении всей истории человечества. Во все времена ее уровень определялся уровнем и потребностями производства, в свою очередь влияя на технологический уровень. По мере развития производства и научных исследований расширялся круг измеряемых физических величин. Если во времена Древнего Египта и античности измерялось всего несколько величин (время, масса, длина, площадь, объем), то сейчас перечень измеряемых величин составляет сотни наименований. Одновременно с расширением номенклатуры измеряемых величин на порядки возрастали диапазоны измерений и уменьшались погрешности измерения. Кроме улучшения метрологических показателей средств измерений (СИ), существенно расширяются их функциональные возможности и повышаются эргономические свойства. Растет удельный вес автоматизированных СИ, увеличивается объем получаемой и обрабатываемой измерительной информации. Автоматизированные СИ встраиваются в системы автоматического управления различного уровня и становятся составными частями автоматизированного производства наряду с обрабатывающим и другим технологическим оборудованием.
В настоящее время технологии сбора данных нашли самое широкое применение: от научно-исследовательских приложений до различных задач испытаний и автоматизации в промышленности. Для осуществления сбора данных учёные и инженеры используют персональные компьютеры (ПК) с шинами PCI, PXI, CompactPCI, PCMCIA, USB, FireWire, а также с последовательными и параллельными портами. Многие устройства сбора данных устанавливаются непосредственно в компьютер и передают данные напрямую в его память. В ряде задач используются удаленные устройства сбора данных, которые подключаются к ПК через сеть Ethernet или через последовательный и параллельный порт.
Методики сбора и обработки информации представляют типовые алгоритмы сбора измерительной информации, введение поправок, сглаживание исходных данных. Для проведения экспериментальных исследований большое значение имеет планирование компьютерного эксперимента и проведение вычислительных экспериментов.
Аппаратура сбора данных
Исходя из целей вашего приложения, вы можете остановить свой выбор на одном из следующих классов устройств сбора данных:
- устройства аналогового ввода/вывода;
-· устройства цифрового ввода/вывода;
-· счётчики/таймеры;
-· многофункциональные устройства, поддерживающие аналоговые и цифровые операции, а также возможности счётчиков.
Аналоговый ввод
Основные параметры устройства аналогового ввода – его возможности и точность, можно определить по параметрам его аналоговых входов. В основных спецификациях устройств сбора данных, доступных для большинства продуктов, указываются количество входных каналов, частота оцифровки, разрешение и входной диапазон напряжений, поддерживаемые данным устройством.
Количество каналов – для приборов с однопроводными и дифференциальными аналоговыми каналами ввода сигналов обычно указывается число входов обоих типов. Однопроводные входы имеют общую землю и используются в случае, когда входной сигнал имеет высокую амплитуду (свыше 1 В), и когда провода, соединяющие источник сигнала и оборудование аналогового ввода, обладают длиной менее 4,5 м. Если входные сигналы не удовлетворяют этим требованиям, то используются дифференциальные входы. В этом случае каждый вход устройства сбора данных имеет собственную «землю», что приводит к устранению синфазного шума в проводах и уменьшению числа ошибок.
Частота оцифровки– данный параметр определяет то, насколько часто происходит аналого-цифровое преобразование входного сигнала. Более высокая частота оцифровки позволяет получить большее количество отсчётов за одинаковое время, т.е. лучше «прописать» форму исходного сигнала. Оцифровка данных может производиться несколькими аналогово-цифровыми преобразователями (АЦП) одновременно или одним АЦП в режиме мультиплексирования, которое является стандартный методом измерения сигналов на с нескольких входных каналов с помощью одного АЦП. В этом режиме АЦП сначала оцифровывает один канал, затем переключается на другой, и так далее.
Разрешение АЦП– это количество бит, используемое АЦП для представления аналогового сигнала в цифровом виде. Чем выше разрешение АЦП, тем большее количество интервалов используется для разбиения входного диапазона, и тем меньше минимальное измеряемое изменение напряжения. На рисунке 2 показана синусоидальная волна и соответствующий ей цифровой образ, полученный с помощью идеального 3-битного АЦП. Преобразователь с разрешением 3 бита (который на самом деле почти нигде не используется, но является хорошим примером) делит диапазон аналогового сигнала на 23 = 8 интервалов.
Каждый интервал представляется двоичным числом между 000 и 111. Очевидно, что в данном случае цифровое представление не очень хорошо соответствует исходному аналоговому сигналу, поскольку информация при преобразовании была потеряна. Однако при увеличении разрешения до 16 бит, количество интервалов измерения АЦП возрастает с 8 до 65 536, что позволяет получать очень точное цифровое представление аналоговых сигналов при условии, что остальная часть аналоговой входной цепи спроектирована без ошибок.
Рисунок 2 – Синусоидальная волна, оцифрованная с разрешением 3 бита
Диапазон измерений– диапазон уровней напряжения входных сигналов, который способен оцифровать АЦП. В многофункциональных приборах DAQ компании NI имеется возможность настройки диапазона измерений сигналов и, таким образом, работать с сигналами различного уровня. Приведение амплитуды сигнала к входному диапазону АЦП позволяет полностью использовать все доступное разрешение преобразователя.
Ширина кода– диапазон измерений, разрешение и усиление устройства сбора данных определяют минимальное измеряемое изменение сигнала. Это изменение напряжения соответствует одному младшему значащему разряду (МЗР) цифрового представления сигнала и обычно называется шириной кода. Идеальная ширина кода находится путём деления диапазона измерений напряжения на коэффициент усиления и количество интервалов, на которые может быть разбит входной диапазон сигнала пре его оцифровке (двойка, возведённая в степень, равную величине разрешения АЦП). Например, один из 16-разрядных многофункциональных приборов NI DAQ 6030E предоставляет выбор между входными диапазонами сигналов 0-10 В и ±10 В и коэффициентами усиления 1, 2, 5, 10, 20, 50 или 100. При диапазоне от 0 до 10 В и усилении 100, идеальная ширина кода определяется следующим выражением:
10 / ( 100 * 216) = 1,5 мкВ
Критический взгляд на аналоговый ввод – Иногда основные характеристики устройства, описанные ранее, могут указывать на то, что устройство СД имеет 16-разрядный АЦП с частотой оцифровки 100 кГц, однако, возможна ситуация, когда все 16 входных каналов не будут оцифровываться с максимальными скоростью и с разрешением. К примеру, на рынке можно найти устройства с 16-разрядными АЦП, эффективное разрешение которых составляет менее 12 бит. Для определения того, будет ли прибор давать желаемые результаты, необходимо внимательно изучить спецификации, связанные с реальным разрешением прибора. Калькулятор точности поможет получить полные характеристики устройств СД компании National Instruments, а в официальных документах Measurement Ready можно найти относящуюся к системам сбора данных информацию о качестве измерений, интеграции программного обеспечения и поддержки решений.
При выборе устройства сбора данных также следует изучить его следующие характеристики: дифференциальную нелинейность, относительную точность, время установления измерительного усилителя и параметры шума.
Дифференциальная нелинейность– в идеале, при увеличении амплитуды сигнала, подаваемого на устройство СД, цифровые значения, выдаваемые АЦП, также должны линейно возрастать. В этом случае зависимость цифрового кода на выходе идеального АЦП от входного напряжения будет линейной. Отклонения реальной кривой от линейной зависимости характеризуют нелинейность преобразователя. Дифференциальная нелинейность характеризует максимальное отклонение ширины коды устройства от идеального значения, соответсвующего 1 МЗР. Идеальный прибор обладает нулевой дифференциальной нелинейностью. В реальности, дифференциальная нелинейность хорошего устройства СД равна ±0.5 МЗР.
Верхнего предела на ширину кода не существует. Коды не могут быть меньше, чем 0 МЗР, поэтому дифференциальная нелинейность всегда больше -1. Плохое устройство СД может иметь ширину кода равной или близкой к нулю, что, по сути, является пропущенным значением. В этом случае вне зависимости от подаваемого на вход напряжения, прибор не сможет оцифровать напряжение, представляемое этим значением. Иногда дифференциальную нелинейность определяют выражением: «у устройства СД нет пропущенных значений». Это означает, что дифференциальная нелинейность ограничена снизу значением -1 МЗР, а верхняя граница не указывается. Все приборы E-серии компании National Instruments гарантированно не имеют пропущенных значений, и их линейность можно определить, исходя из указанного в спецификациях значения дифференциальной нелинейности.
Если устройство СД из предыдущего примера, точность которого составляет 1,5 мкВ, имеет пропущенное значение немного выше 500 мкВ, то увеличение напряжения до 502 мкВ зафиксировано не будет. Прибор зафиксирует изменение сигнала только тогда, когда его амплитуда возрастёт ещё на один МЗР, в данном случае до 503 мкВ. Таким образом, большая дифференциальная нелинейность уменьшает разрешение прибора.
Относительная точность– это измеряемое в МЗР наибольшее отклонение от идеальной передаточной функции прибора, т.е. от прямой линии. Для определения относительной точности прибора нужно подать на его вход минимальное напряжение рабочего диапазона, получить оцифрованное значение, увеличить входное напряжение и так далее до достижения максимального напряжения диапазона. При отображении измеренных точек в виде графика должна получиться примерно прямая линия, как показано на рисунке 3(a). Однако при вычитании настоящей прямой линии из этого графика, получается зависимость, приведённая на рисунке 3(b). Максимальное отклонение от нуля является относительной точностью прибора.
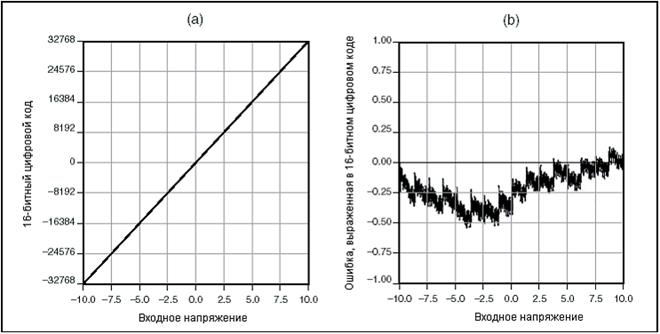
Рисунок 3 – Определение относительной точности прибора DAQ. На рис. 3(a) показана почти линейная зависимость от входного напряжения. На рис. 4(b) показан результат вычитания настоящей прямой линии
Драйвера прибора сбора данных переводят получаемый с АЦП двоичный код в напряжение, умножая его на константу. Высокая относительная точность устройства СД, которая важна для точного перевода двоичного кода в значения напряжения, достигается правильным проектированием АЦП и окружающих его аналоговых цепей.
Время установления– это время, необходимое усилителю, реле или другим электрическим цепям для достижения устойчивого режима работы. Измерительный усилитель при оцифровке нескольких каналов на больших скоростях и при большом усилении, чаще всего, не успевает устанавливать постоянные значения параметров. При таких условиях усилителю трудно справляться с большими перепадами напряжения, которые могут возникнуть при переключении мультиплексора на другой канал. Как правило, чем больше усиление и чем меньше время переключения между каналами, тем менее вероятно, что усилитель быстро достигнет устойчивого режима. На самом деле, ни один из коммерчески доступных усилителей с регулируемым усилением не может достичь 12-битной точности за время менее 2 мкс при коэффициенте усиления равным 100. Компания NI разработала инструментальный усилитель NI-PGIA специально для приложений сбора данных, поэтому приборы, которые используют NI-PGIA, могут работать в устойчивом режиме при высоких скоростях оцифровки и больших усилениях.
Шум– это ненужные компоненты сигнала, появляющиеся при оцифровке сигнала устройством СД. Поскольку ПК является достаточно шумной цифровой средой, сбор данных на встраиваемых в ПК приборах требует от разработчиков тщательного просчёта расположения элементов на многослойной плате. Если просто поместить АЦП, усилитель и цепь управления шиной на одно- или двухслойной плате, получится очень сильно шумящий прибор. Для уменьшения шума в устройствах сбора данных разработчики используют методику экранирования металлом. Надлежащая экранировка должна присутствовать не только у чувствительных аналоговых частей прибора, но также встраиваться в «земляные» слои платы.
На рисунке 4 изображён график постоянного шума, который был получен с помощью платы сбора данных при входном диапазоне сигнала ±10 В и усилении 10. Можно показать, что 1 МЗР = 31 мкВ, т.е. уровень шума 20 МЗР эквивалентен 620 мкВ шума. На рисунке 6 приведены графики шума двух устройств СД, в которых установлены одинаковые АЦП. Два параметра устройства СД могут быть определены из этих графиков – диапазон шума и его распределение. График на рисунке 6(а), который был измерен на приборе PCI-6030E компании National Instruments, имеет плотное распределение отсчётов на 0 и очень малое число точек на других кодах. Распределение гауссовское, как и должно быть у случайного шума. Из графика видно, что пик шума лежит в диапазоне ±3 МЗР. График на рисунке 6(b), измеренный на очень шумном устройстве СД производства конкурирующей компании, имеет совсем другое распределение. Шум прибора составляет больше 20 МЗР, причём многие отсчёты лежат далеко от ожидаемой величины.
Поскольку встраиваемые в ПК приборы сбора данных устроены очень сложно, они могут существенно различаться в точности. Компания NI прикладывает все усилия к тому, чтобы делать очень точные устройства, зачастую даже более точные, чем автономные приборы. Точность приборов NI указывается в их технических спецификациях. Относитесь с осторожностью к платам, которые специфицированы не полностью, опущенные параметры как раз могут быть источником неточных измерений. Учитывая при выборе не только разрешение АЦП, но и другие параметры аналоговых входов, можно быть уверенным в достаточной точности прибора сбора данных для решения определённой задачи.
Рисунок 4 – Сигнал на входе измерительного усилителя, который мультиплексирует 40 каналов с постоянными сигналами, оказался высокочастотным переменным сигналом
Рисунок 5 – Графики шума двух устройств СД с одинаковыми 16-битными АЦП, но с существенно различными параметрами шума. Рис. 5(a) соответствует прибору NI AT-MIO-16XE-10; а рис. 5(b) – устройству СД производства конкурирующей компании.
Аналоговый вывод
Аналоговый вывод часто используется для задания внешнего воздействия на контрольно-измерительную систему. Качество выходного сигнала при этом определяется несколькими характеристиками цифро-аналоговых преобразователей (ЦАП): временем установления, скоростью нарастания выходного напряжения и выходным разрешением.
Время установления– это время, необходимое для установления с заданной точностью на аналоговом выходе устройства сигнала определённой величины. Время установления обычно указывается для изменения величины выходного напряжения от минимального до максимального значения. Более подробную информацию о времени установления можно найти в разделе Аналоговый ввод.
Скорость нарастания выходного напряжения– максимальная скорость изменения выходного сигнала, которую может достичь ЦАП. Время установления и скорость нарастания выходного напряжения определяют то, как быстро ЦАП может изменить амплитуду выходного сигнала. Таким образом, ЦАП с маленьким временем установления и с высокой скоростью нарастания может генерировать высокочастотные сигналы, поскольку на изменение уровня выходного напряжения с заданной точностью ему требуется меньше времени.
Примером приложения, где требуются хорошие вышеуказанные параметры, является задача генерации высокочастотных акустических сигналов. С другой стороны, в источнике напряжения для управления нагревательным элементом быстрого цифро-аналогового преобразования не требуется, поскольку температура не сможет очень быстро реагировать на измерения напряжения.
Выходное разрешение– как и в случае аналогового ввода данный параметр определяет количество разрядов в цифровом коде, который используется для генерации аналогового сигнала. Чем выше разрядность ЦАП, тем меньше инкремент напряжения, и тем более гладкий сигнал получается на выходе генератора. В приложениях, в которых требуется широкий динамический диапазон с маленьким инкрементом напряжения для выходного аналогового сигнала, следует использовать ЦАП с высоким разрешением.
Цифровые триггеры
Во многих приложениях начало и прекращение сбора данных следует осуществлять по какому-либо внешнему событию. Цифровые триггеры служат для синхронизации процедур сбора данных и генерации сигналов с внешними цифровыми импульсами. Аналоговые триггеры, которые используются в основном в операциях аналогового ввода, запускают и останавливают операции сбора данных при достижении входным сигналом определённого аналогового уровня напряжения при заданной полярности. Драйвер NI-DAQ поможет вам быстро и легко сконфигурировать параметры синхронизации для одного или нескольких измерительных приборов.
Цифровой ввод/вывод
В компьютерных ССД цифровые интерфейсы часто используются для управления процессами, генерации сигналов для тестирования и для взаимодействия с периферийным оборудованием. Во всех этих задачах важными параметрами являются количество доступных цифровых линий, их пропускная способность и скорость считывания и записи данных. Если цифровые линии используются для управления такими процессами как включение/выключение нагревательных элементов, двигателей или ламп, то высокая скорость передачи данных, как правило, не требуется, поскольку такое оборудование работает не очень быстро. Количество цифровых линий, конечно, должно совпадать с числом управляемых процессов. В каждом из этих примеров ток, требуемый для включения и выключения устройств, должен быть меньше, чем возможный ток возбуждения устройства. Цифровой ввод/вывод также используется в промышленных приложениях для проверки состояния переключателей или для определения уровня напряжения. Кроме того, цифровые каналы применяются для высокоскоростного квитирования или для простых методов передачи данных.
При применении соответствующих модулей согласования цифровых сигналов можно использовать слаботочные сигналы ТТЛ к/от оборудования СД для наблюдения/управления сигналами высокого напряжения или тока в промышленных установках или для управления внешними реле. К примеру, напряжение, требуемое для того, чтобы открыть или закрыть большой клапан может составлять примерно 100 В при переменном токе с амплитудой 2 А. Поскольку выход прибора цифрового ввода/вывода даёт от 0 до 5 В при постоянном токе в несколько миллиампер, следует использовать модуль согласования сигналов SCXI для создания сигнала управления клапаном.
Цифровой ввод/вывод часто используется для передачи данных между компьютером и различным оборудованием, например, регистраторами данных, устройствами обработки данных и принтерами. Поскольку это оборудование передаёт данные порциями в 1 байт (8 бит), цифровые линии на встраиваемых приборах цифрового ввода/вывода сгруппированы по 8 штук. Кроме того, некоторые платы, поддерживающие цифровые операции, имеют цепи квитирования для нужд задач синхронизации. Число каналов, скорость передачи данных, возможность квитирования являются важными характеристиками прибора и должны выбираться с учётом требования задачи.
Программное обеспечение
Программное обеспечение (ПО) превращает ПК и оборудование СД в завершённую систему сбора, анализа и отображения данных. Без управляющего ПО оборудование сбора данных не будет корректно работать, поэтому в большинстве приложений СД используются специализированные программные драйверы. Драйверы являются программным обеспечением, позволяющим непосредственно управлять устройствами СД, интегрируя их с ресурсами ПК, такими как память, прерывания процессора и ПДП. Драйверы устраняют необходимость в сложном низкоуровневом программировании оборудования, предоставляя пользователю простой и понятный интерфейс.
Возрастающие возможности и усовершенствование оборудования сбора данных и компьютеров подчёркивают важность и ценность хороших драйверов. Правильно выбранный драйвер может обеспечить оптимальное сочетание гибкости и производительности, при этом сократив время разработки приложения.
При выборе программного драйвера следует учитывать сразу несколько факторов:
- функции;
- операционная система;
- доступность на программном уровне функции оборудования;
- ограничение драйвером производительности системы;
- языки программирования, используемые с драйвером.
Системы реального времени
Системы жёсткого реального времени обеспечивают детерминированное выполнение задач, повышенную надёжность и встроенное функционирование. Детерминированное исполнение требуется в задачах динамометрического и электронного управления при тестировании элементов, где операции должны последовательно выполняться в течение чётко определённого времени. Кроме этого, системы реального времени обеспечивают более высокую степень надёжности, поскольку они выполняют только одно приложение за раз, что делает их идеальными для критических компонент, например для систем аварийного останова. Наконец, системы реального времени не требуют взаимодействия с пользователем, что позволяет им работать в независимых или встроенных системах бортовой и удалённой регистрации данных. Разработка программы сбора данных для платформы реального времени производится на ПК и затем загружается на контроллер реального времени.
С операционной системой жёсткого реального времени можно использовать специальное оборудование реального времени, например платы сбора данных серии RT, которые содержат все необходимые компоненты для быстрого создания систем реального времени. Каждая плата состоит из двух компонент: процессорной платы и дочерней платы сбора данных. Подобно ПК, процессорная плата серии RT содержит:
- процессор;
- набор микросхем;
- BIOS;
- память.
Однако у процессорной платы нет жёсткого диска, монитора, клавиатуры, мышки и других, стандартных для ПК, устройств ввода/вывода (например, последовательного или параллельного портов). Таким образом, эта плата должна работать с основным компьютером во время разработки приложения, его отладки, работы с пользовательским интерфейсом, сохранения данных на диск и т.д.
Введение поправок
Наиболее простой и распространенный случай – введение поправок на известную систематическую погрешность ИК. Аналогичные поправки могут вводиться во всех видах СИ. Алгоритм введения поправки очевиден: из кода, выдаваемого ИК, должен вычитаться код известной систематической погрешности. Поправка на аддитивную систематическую погрешность задается в виде одного числа, а поправка на мультипликативную систематическую погрешность предварительно рассчитывается в соответствии с заложенным алгоритмом с учетом результата измерения соответствующего ИК. Например, поправка на систематическую погрешность коэффициента передачи измерительного канала равна результату измерения, умноженному на относительную систематическую погрешность коэффициента передачи,
оцененную экспериментально.
Специфичными для ИИС являются поправки на систематические погрешности, обусловленные взаимным влиянием каналов. Для ИК погрешность, вызванная влиянием другого канала, может быть как аддитивной (например, из-за проникновения сигнала по паразитным каналам связи), так и мультипликативной (например, из-за изменения нагрузки на общий источник питания ПИП или ВИП). Однако рассчитываются эти поправки аналогично поправкам на собственные мультипликативные погрешности в соответствии с алгоритмом, описывающим взаимное влияние каналов, с учетом данных о сигнале в канале, влияние которого компенсируется.
Поправки на систематическую погрешность для каждого отсчета, выдаваемого ИК, являются числами. Однако для разных отсчетов они могут рассматриваться как функции времени или других аргументов. В частности, как следует из определения систематической погрешности, она остается постоянной или закономерно изменяется. Если закон изменения известен, то вводимая поправка оказывается переменной. К поправкам в виде функций мы приходим при компенсации взаимного влияния каналов и в некоторых других случаях, например при компенсации влияния внешних факторов.
Как и для других СИ, величины поправок и алгоритмы их расчета определяются на основе теоретических и экспериментальных исследований метрологических характеристик ИК. Например, при питании вторичных преобразователей в виде мостов переменного тока от одного генератора систематическая погрешность будет пропорциональна величине сигнала во влияющем канале. К этому выводу можно прийти из анализа мостовой схемы с учетом внутреннего сопротивления питающего генератора. Величину коэффициента пропорциональности для каждого канала проще определить экспериментально, поскольку применение теоретических методов все равно потребует некоторых числовых данных, которые можно получить только экспериментально. К вопросу о введении поправок мы вернемся при анализе погрешностей измерения.
Более сложным является введение поправок, компенсирующих дополнительную погрешность, вызванную внешними условиями. Наиболее часто вводятся температурные поправки, в частности при линейных измерениях. Величина поправки, вычитаемая из результата измерения, в этом случае рассчитывается по формуле
где Lизм – результат измерения;
 и aи – температура и коэффициент температурного расширения измерительной оснастки, контактирующей с измеряемой деталью;
и aи – температура и коэффициент температурного расширения измерительной оснастки, контактирующей с измеряемой деталью;
 и aД – то же для измеряемой детали.
и aД – то же для измеряемой детали.
Для определения поправки необходимо измерить температуры детали и измерительной оснастки, то есть ввести в ИИС два новых ИК. Аналогичные поправки могут вводиться и для компенсации изменения сопротивления резисторов. При этом в зависимости от материала резистора может использоваться линейная или экспоненциальная модель зависимости сопротивления от температуры.
Напряжение, питающее мосты или делители, определяет их чувствительность. Поэтому дополнительный ИК, измеряющий это напряжение, дает возможность автоматически вводить поправку на нестабильность чувствительности ИК, обусловленную нестабильностью питающего напряжения.
Аналогично могут компенсироваться влияния давления, влажности, изменения питания (не обязательно электрического), электрических и магнитных полей и многих других физических факторов. Для измерения влияющих факторов должны использоваться специальные ИК, что не является спецификой ИИС, поскольку при использовании неавтоматизированных СИ поправки определялись с учетом результатов измерения влияющих факторов с помощью других СИ. Алгоритмы введения этих поправок индивидуальны в каждом конкретном случае и определяются в ходе специальных исследований.
Ранее говорилось о том, что, если исследуемые физические величины рассматриваются как единое целое, необходимо одновременное получение их отсчетов. Однако из-за временных сдвигов в ИК отсчеты этих величин xij могут браться в различные моменты времени t. Для привязки их к одинаковым моментам времени tij можно использовать линейную интерполяцию наблюдаемых функций
Два последовательных отсчета измеряемой величины, входящих в данную формулу, выбираются таким образом, чтобы

Для интерполяции в данной формуле могут использоваться и полиномы более высоких степеней, если отсчеты достаточно разнесены во времени.
Для отдельных областей измерения могут применяться специфичные алгоритмы предварительной обработки, используемые во всех ИИС данной области. Например, при
геометрических измерениях измерительный наконечник перемещается по эквидистанте относительно исследуемой поверхности. Поэтому собранный массив данных должен пересчитываться в координаты точек поверхности. Поскольку за счет конечного диаметра измерительного наконечника происходит специфичное сглаживание исследуемой поверхности, полное восстановление исследуемой поверхности не всегда возможно.
При исследовании температуры малых объектов иногда приходится корректировать собранные данные с учетом теплоемкости чувствительного элемента датчика, контактирующего с объектом. При электрических измерениях иногда посредством поправок компенсируется влияние внутреннего сопротивления датчиков. При измерении характеристик радиосигналов на сверхвысоких частотах приходится вводить поправки с учетом коэффициентов отражения. Подобные примеры можно привести для многих областей измерения.
Нелинейность ИК является одним из частных источников систематической мультипликативной погрешности. Поэтому линеаризацию характеристик можно рассматривать
как частный случай введения поправок. Однако введение этих поправок базируется на столь специфичном алгоритме, что его рассматривают как самостоятельную процедуру.
Нелинейность любого элемента ИК и всего канала характеризуется максимальным отклонением характеристики от прямой, соединяющей граничные точки рабочего диапазона. Наибольший вклад в нелинейность вносят первичные и вторичные измерительные преобразователи. Однако некоторую нелинейность могут вносить АЦП и каналы связи.
Очевидно, что нелинейность можно устранить, если она стабильна. Только в этом случае вызываемую ею погрешность можно рассматривать как систематическую и компенсировать ее, вводя поправки путем линеаризации. Если вид характеристики преобразования достаточно быстро меняется в процессе эксплуатации ИИС, устранить нелинейность практически невозможно, поскольку вносимая погрешность будет близка к случайной. При медленном изменении формы характеристики, когда ее существенные изменения происходят за недели или месяцы, возможна компенсация ее нестабильности за счет периодического повторения режима линеаризации (настройки).
При аналоговых методах обработки для компенсации нелинейности измерительных преобразователей использовались различные электронные компоненты, работающие на нелинейных участках своих характеристик: лампы, диоды, транзисторы. Таким способом удавалось уменьшить нелинейность в полтора-два раза. Линеаризация проводилась для усредненных характеристик, подстройка для конкретных экземпляров преобразователей была сложна. Поэтому нелинейность измерительных преобразователей являлась основным фактором, ограничивавшим их точность. Ситуация принципиально изменилась с использованием для линеаризации цифровых устройств.
Применяются два основных алгоритма линеаризации:
- аппроксимация характеристики преобразования полиномом (степенным, гармоническим и др.);
- кусочно-линейная аппроксимация.
Оба метода эффективно устраняют нелинейность, если характеристика изменяется достаточно плавно (вторая производная меняет знак в рабочем диапазоне малое число раз). Нелинейность, обусловленная физическими эффектами, заложенными в принцип работы преобразователя, имеет именно такой плавный характер. Неплавная нелинейность обусловлена
особенностями конструкции и качеством изготовления. Например, дефекты намотки катушек индуктивных преобразователей приводят к неплавной нелинейности. (Интервал перемещений, в пределах которого происходит изменение знака второй производной, близок к величине шага намотки, то есть составляет несколько сотых долей миллиметра.) Устранить такую нелинейность практически невозможно, поскольку для этого потребуются или полиномы очень высоких степеней, или очень большое число отрезков кусочно-линейной аппроксимации.
Оба метода имеют свои преимущества и недостатки. Однако более широкое применение нашел второй метод, как более простой и более эффективно устраняющий локальную нелинейность.
При первом подходе ищутся параметры функции известной формы (например, степенного полинома), при которых точки (xj; Cj) наименее удалены от этой функции. Кусочно-линейная аппроксимация (на рис. 13 длина отрезка 1 характеризует нелинейность) заключается в том, что нелинейная характеристика канала заменяется отрезками прямых, проходящих через экспериментально полученные точки (xj; Cj) и (xj+1; Cj+1), где i= 1, ..., п. Обычно число точек равно 6... 11, что соответствует аппроксимации пятьюдесятью отрезками прямых.
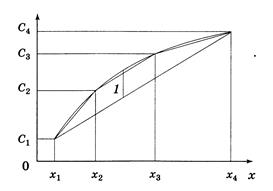
Рисунок 13
Координаты узлов аппроксимации должны быть измерены с погрешностями, в несколько раз меньшими допускаемой погрешности ИК, аналогично тому, как это делается при калибровке или поверке. С учетом вида аппроксимации характеристики преобразования обратное преобразование, обеспечивающее линеаризацию, также будет кусочно-линейной функцией

Очевидно, что с увеличением числа линейных отрезков обеспечивается более высокая линейность. Однако при этом возрастают требуемый объем памяти (что не очень существенно) и объем экспериментальных работ по получению исходных данных.
Кусочная линеаризация позволяет уменьшить нелинейность в несколько раз и даже в десятки раз. Благодаря этому, используя датчики, конструкция которых не менялась несколько десятилетий, можно обеспечить значительно более высокую точность измерения. При этом подчеркнем, что в соответствии с рассмотренным алгоритмом производится линеаризация характеристики конкретного экземпляра датчика, а не усредненной характеристики, что устраняет и влияние разброса характеристик.
Аппаратно линеа<
Дата: 2016-09-30, просмотров: 294.