Расчёт пути и времени обгона с постоянной скоростью производится по формулам (1.4) и (1.5).
Расстояние, необходимое для безопасного обгона, называемое путь обгона, Sоб1, м, может быть определено по формуле:
 (1.1)
(1.1)
или
Sоб1=V1tоб1 (1.2)
где: D1 и D2 - дистанции безопасности между обгоняющим и обгоняемым автомобилями в начале и конце обгона, м;
L1 и L2 - габаритные длины обгоняющего и обгоняемого автомобилей, м;
S2, - путь обгоняемого автомобиля, м;
V1 - скорость обгоняющего автомобиля, м/с;
tоб1 - время обгона с постоянной скоростью, с.
Путь обгоняемого автомобиля:
 (1.3)
(1.3)
 м.
м.
где V2 - скорость обгоняемого автомобиля, м/с.
Следовательно, путь обгона можно определить по следующей зависимости:
 (1.4)
(1.4)
 м.
м.
Время обгона:
 (1.5)
(1.5)
 с.
с.
Величины дистанций безопасности D1 и D2 в большой степени зависят от дорожных условий, типа автомобиля, опыта и квалификации водителя. Точный их расчёт невозможен, поэтому правилами дорожного движения предусматривается, что дистанция между автомобилями выбирается водителем, который учитывает не только возможность экстренного торможения переднего автомобиля, но и вероятность его в данной дорожной обстановке. При временном интервале между следующими один за другим автомобилями менее 9... 10 с на величину дистанции влияет также автомобиля. Наименьшие дистанции выдерживают при следовании легкового автомобиля за легковым, а максимальные - при движении грузового автомобиля за легковым. Характер зависимости дистанции от скорости одинаков для взаимодействующих автомобилей всех типов.
На основе накопленных экспериментальных данных первая дистанция безопасности может быть представлена в виде функции скорости обгоняющего автомобиля:
 (1.6)
(1.6)
 м.
м.
а вторая - в виде функции скорости обгоняемого автомобиля:
| |
 (1.7)
(1.7)
 м.
м.
где  и
и  - эмпирические коэффициенты, зависящие от типа обгоняемого автомобиля, их значения приведены в таблице 1.1.
- эмпирические коэффициенты, зависящие от типа обгоняемого автомобиля, их значения приведены в таблице 1.1.
Вторая дистанция безопасности короче первой, так как водитель обгоняющего автомобиля стремиться быстрее возвратиться на свою полосу движения и иногда «срезает угол». Кроме того, скорость V1 обгоняющего автомобиля больше скорости V2 обгоняемого, поэтому если в момент завершения обгона дистанция между автомобилями и окажется короче допустимой, то она очень быстро увеличится. После проведённых расчётов необходимо построить график и схему обгона (рисунок 1.1), считая движение обоих автомобилей равномерным, и соответствующим зависимости S=S(t). Эта зависимость представляет собой прямые линии 1 и 2 соответственно для обгоняющего и обгоняемого автомобилей.
В начале обгона расстояние между передними частями обгоняющего и обгоняемого автомобилей равно D1+L2. Точка А пересечения прямых 1 и 2 характеризует момент обгона, в который оба автомобиля поравнялись (время tA)после чего обгоняющий автомобиль начинает выходить вперед. Чтобы определить минимально необходимые время и путь обгона, нужно найти на графике такие две точки В и С на линиях 1 и 2, расстояние между которыми по горизонтали было бы равно сумме D1+L2. Тогда абсцисса точки В определит путь обгона, а ордината - время обгона.
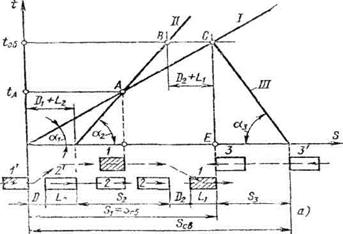
Рисунок 1.1 - Характеристики обгона при равномерном движении обгоняющего и обгоняемого автомобилей.
Определяем минимальное расстояние Sсв1, которое должно быть свободным перед обгоняющим автомобилем в начале обгона:
 (1.8)
(1.8)
 м.
м.
или с учётом (1.4):
 (1.9)
(1.9)
где Sз и V3 - путь и скорость встречного автомобиля, м/с.
Скорость встречного автомобиля в действительных условиях движения практически невозможно определить с высокой степенью точности и водитель, как правило, определяет её на основе своего опыта интуитивным путём. Для расчётов же примем следующую её зависимость от скорости обгоняющего автомобиля:
 (1.10)
(1.10)
 м/c
м/c
После проведения расчётов и построения на их основе соответствующих зависимостей необходимо проанализировать, какие факторы влияют на путь и время обгона, а также условия движения, в которых возможен и практикуется такой маневр.
Дата: 2019-07-30, просмотров: 288.