Поскольку опорное напряжение СИФУ — пилообразное, то максимальный коэффициент усиления ТП по напряжению при угле регулирования a = 90О.
Коэффициент передачи ТП рассчитывается по формуле:
 (7.1)
(7.1)
где UУ.МАКС – максимальное управляющее напряжение ТП, обычно принимают UУ.МАКС = 10 В. Строим регулировочную характеристику БВ на холостом ходу по формуле:
 (7.2)
(7.2)
На рисунке 7.1 представлена регулировочная характеристика БВ.
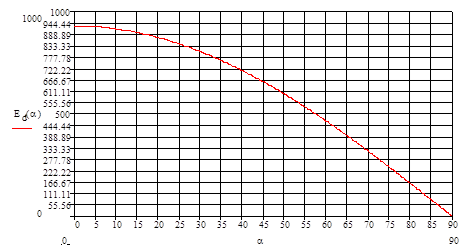
Рисунок 7.1 - Регулировочная характеристика БВ
По рисунку 7.1 определяем приращения:


Коэффициент усиления блока вентилей КБВ:
 (7.3)
(7.3)
При пилообразном опорном напряжении СИФУ характеристика вход-выход ТП нелинейная и представляет собой произведение двух характеристик – регулировочной характеристики СИФУ и регулировочной характеристики блока вентилей (БВ). Построим на рисунке 7.2 регулировочную характеристику СИФУ при пилообразном опорном напряжении она линейная:
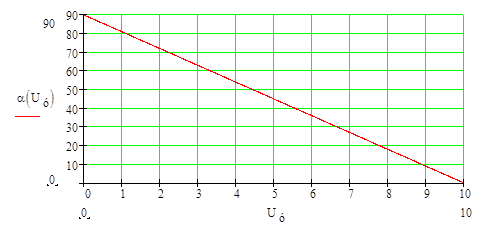
Рисунок 7.2 – Регулировочная характеристика СИФУ
По рисунку 7.2 определяем приращения:


Коэффициент передачи СИФУ:
 (7.4)
(7.4)
Общий коэффициент передачи ТП:
 (7.5)
(7.5)
Постоянная времени ТП:
 (7.6)
(7.6)
где TФ – постоянная времени фильтра, установленного на входе СИФУ при совместном согласованном управлении, TФ = 4…8 мс.;
TС.З. – среднестатистическое запаздывание, присущее ТП как звену запаздывания

Эквивалентное активное сопротивление системы якорной цепи системы ТП-Д:
 (7.7)
(7.7)

Эквивалентная индуктивность якорной цепи системы ТП-Д:
 (7.8)
(7.8)
Электромагнитная постоянная времени системы ТП-Д:
 (7.9)
(7.9)
Электромеханическая постоянная времени системы ТП-Д:
 (7.10)
(7.10)
где  - суммарный момент инерции, приведенный к валу электродвигателя, состоит из момента инерции двигателя JДВ и механизма JМЕХ. Если JМЕХ не задан, то его можно принять:
- суммарный момент инерции, приведенный к валу электродвигателя, состоит из момента инерции двигателя JДВ и механизма JМЕХ. Если JМЕХ не задан, то его можно принять:

Расчёт конструктивной постоянной двигателя:
 (7.11)
(7.11)
Расчёт номинальной скорости вращения двигателя:
 (7.12)
(7.12)
Коэффициент А, связывающий угол поворота вала двигателя с величиной перемещения механизма определим, исходя из следующих предположений. Поскольку согласно задания на курсовой проект система должна отрабатывать заданное перемещение  с выходом на максимальную скорость, а статический момент сопротивления на валу двигателя равен нулю, то для этого случая верно соотношение:
с выходом на максимальную скорость, а статический момент сопротивления на валу двигателя равен нулю, то для этого случая верно соотношение:
 , (7.13)
, (7.13)
Где  номинальной скорости вращения двигателя;
номинальной скорости вращения двигателя;
 динамический ток двигателя в динамических режимах. Таким образом:
динамический ток двигателя в динамических режимах. Таким образом:
На рисунке 7.3 представлена структурная схема системы ТП-Д:
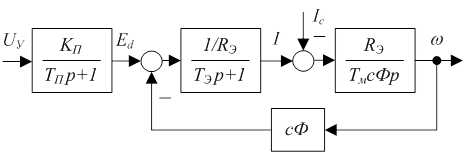
Рисунок 7.3 – Структурная схема системы ТП-Д
Дата: 2019-07-30, просмотров: 368.