ГОУ СПО Тульский государственный машиностроительный
колледж им. Н.Демидова
Курсовая работа
по учебной дисциплине: Компоновка ЭВМ и ПК
Тема: Интерфейс Serial ATA
Выполнил студент группы гр. 12831
Тула 2007
Содержание
Введение
1. Семейство IDE-контролеров
1.1 IDE/ATA
1.2 ATAPI
1.3 ATA - 2, FAST – ATA, EIDE
1.4 ATA-3
1.5 ULTRA-ATA/33
1.6 Ultra-ATA/66
1.7 Скорость передачи данных
2. Установка контроллера
2.1 Подготовка к установке нового контроллера
2.2 Установка нового контроллера
2.3 Конфигурирование нового контроллера
2.4 Установка программного обеспечения
2.5 Модернизация BIOS контроллера
3. Основные технологии RAID
3.1 Дисковые массивы
3.2 Адаптеры дисковых массивов
3.3 Резервный сектор
3.4 Типы дисковых массивов
4. Поиск неисправностей интерфейса Serial-ATA
5. Техника безопасности
6. Тестирование системы на наличие S-ATA
Список использованной литературы
Заключение
ВВЕДЕНИЕ
Современный информационный мир невозможно представить без персональных компьютеров, микро ЭВМ, поскольку их значение имеет важную роль в современном информационном мире. Канули в лету те времена, когда ЭВМ занимали целые здания, но на сегодняшний день нам они представлены в виде микро ЭВМ, очень много времени прошло и много изменений произошло на этом промежутки времени, одно поколение компьютеров сменялось другим совершенствовалось практически все от внешнего вида до его возможностей.
Условно части ЭВМ можно разделить на основные устройства и периферийные. К основным устройствам относят процессор и память, а к периферийным все остальное, в том числе и устройства для долговременного хранения данных (жесткий диск). Невозможно представить без жесткого диска современный ПК, так как вся информация располагалась именно на нем, в том числе и Операционная Система, которая осуществляет непосредственный интерфейс между пользователем и аппаратной части ЭВМ, то присутствие жесткого диска на ПК просто необходимо. Существует различное множество жестких дисков, соответственно существует и множество интерфейсов винчестеров, среди которых и встречается Serial ATA.
Новой (относительно) разработкой в области интерфейсов винчестеров является интерфейс SerialATA. В отличие от своего предшественника Parallel ATA, Serial ATA использует последовательную передачу данных, а не параллельную, что подразумевает сокращение числа необходимых для соединения устройств проводников
Семейство IDE - контроллеров
IDE / ATA
Интерфейс IDE был разработан в 1988 году в качестве альтернативного ответа на практически безуспешные в то время попытки фирм-производителей создать, стандартное программное обеспечение для периферийных SCSI-устройств. Группа промышленный предприятий образовала Комитет общих методов доступа САМС (Common Access Committe) с целью разработки интерфейса AT A (AT Attachment— подключение к АТ). Который можно было бы встраивать в недорогие, совместимые с AT системные платы, Комитет САМС разработал стандарт (описание) интерфейса, который впоследствии был одобрена Национальным институтом стандартизации США (ANSI — American National Standard Institute). Термин ЛТЛ-интерфеис в общем случае характеризует тип интерфейса и может относиться как к накопителю, так и к контроллеру. Это означает, в частности, что для IDE- накопителя необходим IDE-контроллер.
Несмотря на то, что, на сегодняшний день разработано несколько разновидностей интерфейсов семейства IDE (EIDE, UDMA/33, UDMA/66, UDMA/100 и UDMA/133), все они относятся к одному IDE-типу
Термины IDE и АТА являются практически синонимами. И та, и другая аббревиатура относится к дисковым накопителям со встроенными контроллерами. Они радикальным образом отличались от предшественников — жестких дисков с интерфейсами ST5O6/4I2 и ESDI (Enhanced Small Device Interface — улучшенный интерфейс малых устройств), в которых нужна была отдельная плата контроллера. Такой подход привел к снижению стойкости интерфейса и упрощению аппаратно-программных средств компьютеров. Интерес IDE оказался настолько дешевой и легко конфигурируемой системой, что его появление привело к настоящему буму в промышленности, производящей жесткие диски
Хотя термины IDE и АТА чаше всего используют как синонимы, между ними, все же, есть разница. АТА— это формальный стандарт, в котором определены характеристики и принципы работы интерфейса и накопителей, a IDE— это торговая марка и конструктивное решение, этапное для реализации стандарта АТА (40-контактный интерфейсный разъем, и т.п.).
Характерные черты и архитектура классического IDE -интерфейса. IDE-накопители считаются интеллектуальными устройствами, поскольку почти все функциональные узлы, которые в системах с накопителями старых типов располагались отдельной плате-адаптере, встроены в сам IDE-накопитель. Данные передаются через единый кабель, подключенный к контроллеру (он может представлять собой как отдельное устройство, так и быть смонтированным на системной плате), который, в свою очередь, подключен к системной шине расширения ISA (Industrial Standard Architecture —архитектура промышленного стандарта) или PCI (Peripheral Component Interconnect — соединение внешних устройств). Схемотехника внешних по отношению к IDE-накопителям устройств настолько проста, что практически во всех комплектах (chipset) интегральных схем современных системных плат предусмотрены двухканальные IDE-контроллеры, и надежность в отдельных платах расширения практически отпала. По современным меркам контролеры с классическим IDE-интерфейсом работают довольно медленно: скорость передачи данных едва превышает 10 Мбайт/с. Емкость накопителей со стандартным IDE-интерфейсом ограничена величиной 504 Мбайт. (В EIDE и более поздних версиях IDE-интерфейса традиционный барьер в 504 Мбайт преодолен, и емкости накопителей могут превышать 32 Гбайт). Интерфейс IDE лишен гибкости и возможностей наращивания, присущих стандарту SCSI, но по сравнению с ним стоит существенно дешевле. Поэтому его часто используют в простых, недорогих компьютерах низкого и среднего класса, возможно в ПК, которых не предполагается существенно наращивать. Изначально интерфейс IDE разрабатывался для накопителей на жестких дисках, однако впоследствии он стал использоваться и для подключения дисководов CD-ROM и накопителей на магнитной ленте, работающих в соответствии с протоколом обмена данными АТАРI (АТА Packet Interface — пакетный интерфейс АТА). В компьютерной литературе много говорится об интеллектуальных возможностях IDE-интерфейса. Они определяются теми функциями, которые способен выполнять Кроенный в накопитель контроллер. В этой книге, говоря об интеллектуальных возможностях интерфейса IDE, мы будем подразумевать следующие. Во-первых, интеллектуальные IDE-накопители способны работать в режиме преобразования параметров. Это означает, подпрограмме настройки параметров BIOS Basic Input/Output System — базовая система вы можете вводить в память CMOS любую комбинацию параметров жесткого диска (количество цилиндров, головок и секторов). При этом должно соблюдаться одно условие: суммарное количество секторов в модели не должно превышать реальное количество секторов в накопителей. Преобразование параметров приобретает особое значение в тех случаях, когда реальное количество цилиндров в накопителе превышает 1024 (что характерно для всех современных IDE-накопителей). Неинтеллектуальные IDЕ-накопители могут работать только в «физическом» режиме. CMOS параметры должны соответствовать реальным параметрам жесткого диска. Во-вторых, в интеллектуальных накопителях предусмотрена поддержка нескольких дополнительных команд, которые входят в необязательную часть стандарта АТА.
Еще одной особенностью технологии интеллектуального IDE-интерфейса являет зонная запись, позволяющая разбивать дорожки на переменное количество секторов. B результате появляется возможность увеличить общее количество секторов, а значит и суммарную емкость накопителя. Поскольку BIOS может работать только с жесткими дисками с фиксированным количеством секторов на дорожке, IDE-накопители с зонной записью всегда должны функционировать в режиме преобразования параметров. IDЕ-накопитель работает в режиме преобразования параметров, то вы не в состоянии изменить коэффициент чередования секторов.
Компоновка типичного IDE-контроллера показана на рис. 1. Стандартный IDE-накопитель подключается к контроллеру с помощью 40-жильного кабеля. (В старых разработках 1ВМ использовался 44 или 72-жильный кабель). Этот сигнальный кабель предназначен для передачи данных и управляющих сигналов между накопителем и контроллером. Как и в SCSI-устройствах, в IDE-накопителях для обеспечения параметров линий связи и электрических характеристик сигналов также устанавливаются нагрузочные сопротивления, но они, в отличие от согласующих резисторов в интерфейсе SCSI, обычно впаяны в плату и не могут быть удалены. В большинстве случаев два накопителя IDE/EIDEтипа могут работать совместно при наличии согласующих сопротивлений в каждом из них, Если на накопителе имеются перемычки выбора режима, то с их помощью конкретное устройство можно сделать либо ведущим (master), либо ведомым (slave).
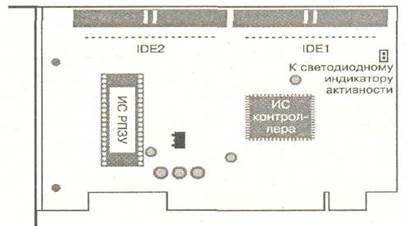
Рисунок. 1. Плата типичного двухканального контроллера Ultra-DMA/66
Значение выводов разъемов 40-жильного изолированного сигнального кабеля накопителя приведено в таблице. 1. В отличие от распространенных ранее интерфсй-Т506/412 и ESDI (Enhanced Small Device Interface — улучшенный интерфейс малых устройств), в интерфейсе IDE для передачи сигналов используются как четные, так и нечетные проводники кабеля.
Отметим также, что перед обозначением большинства управляющих сигналов стоит знак «—». Это означает, что активный уровень данного сигнала 6—т.е. значению «истина» соответствует уровень логического нуля. Уровни всех передаваемых по кабелю сигналов управления соответствуют транзисторной (TTL) логике, т.е. уровню логического нуля соответствует полное напряжение от 0 до 0,8 В, а логической единицы — напряжение от +2,0 В до напряжения питания.
Таблица 1. Назначение выводов разъема интерфейса IDE
| Наименование сигнала | Вывод | Наименование сигнала |
| Reset | 2 | Общий |
| DD7 | 4 | DD8 |
| DD6 | 5 | DD9 |
| DD5 | 8 | DD10 |
| DD4 | 10 | DD11 |
| DD3 | 12 | BB12 |
| DD2 | 14 | BB13 |
| DD1 | 16 | DD14 |
| DD0 | 18 | DD15 |
| Общий | 20 | Отсутствует |
| DMARQ | 22 | Общий |
| -I/O Write Data (-DIOW) | 24 | Общий |
| -I/O Read Data (-DIOR) | 26 | Общий |
| -I/O Chanel Ready (-IORDY) | 28 | Общий |
| -DMA Acknowledge (-DMASK) | 30 | Общий |
| Interrupt Request (INTRQ) | 32 | -Host 16-bit I/O (IOCS16) |
| DA1 | 34 | -Passed Diagnostic (-PDIAG) |
| DA0 | 36 | DA2 |
| -Host Chip Sel 0 (-CS1FX) | 38 | -Host Chip Sel 1 (-CS3FX) |
| -Drive Active (-DASP) | 40 | Общий |
Выбор точек ввода данных и регистров в IDE-накопителе осуществляется с помощью адресной шины накопителя (Drive Address Вus) DA0-DA2 (выводы 35, 33 и 36 соответственно) в сочетании с входами выбора микросхемы накопителя (Host Chip Set) -CS1FX S3FX (выводы 37 и 38). При появлении активного уровня сигнала на управляющей.
J-D10R (I/O Read Data — ввод/вывод, чтение данных, вывод 25) накопитель выполняя считывания, а при появлении управляющего сигнала на линии -DIOW (I/O Write ввод/вывод, запись данных, вывод 23) — цикл записи. В отличие от прежних интерфейсов, которые были последовательными, т.е. преобразование данных в параллельный (Осуществлялось внешним контроллером). В интерфейсе IDE предусмотрено 16 двунаправленных линий передачи данных в накопитель или из нее (DDO-DD1: выводы с 3 по 18). После окончания передачи данных интегральная схема (ИС) контролера жесткого диска выдает в накопитель сигнал подтверждения –DMACK. Наконец, при подаче сигнал сброса (Reset, вывод 1) накопитель переходя в исходное состояние, т.е. то, в котором он находится после включения питания. Сим сброса подается при включении питания и при перезагрузке компьютера.
Часть линий интерфейса IDE используется для передачи управляющих сигналов в обратном направлении, т.е. от накопителя к контроллеру. Сигнал запроса прямого доступа к памяти DMARQ (Direct Memory Access ReQuest, вывод 21) используется для инициализации передачи данных в накопитель или из него. Направление передачи данных определяется состоянием входов -DIOR и –DI0W. Сигнал -DMACK выдается после того, когда DMARQ переходит в активное состояние. Сигнал готовности канала ввода/вывода-IORDY (I/O channel ReaDY, вывод 27) используется для привлечения внимания в тех случаях, когда накопитель еще не готов ответить на запрос о передаче данных, Запрет прерывания INTRQ (INTerrupt ReQuest, вывод 31) выдается накопителем в тех случаях, когда он ожидает ответа от системы
(готовится к операции обмена данными с контроллером). Сигнал занятости накопителя -DASP (Drive Active, вывод 39) принимает значения логического «О» в случае какой-либо активности жесткого диска. Сигнал прохождения диагностики -PDIAG (Passed DIAGnostics, вывод 34) появляется после выполнения любой диагностической команды или сброса накопителя. Если уровень сигнала -PDIAG ниже (логического «О»), то система полагает, что накопитель готов к работе. Наконец, сигнал состоят 16-разрядного ввода/вывода -IOCS 16 (Host 16-bit I/O, вывод 32) используется для информирования контроллера о том, что накопитель готов к передаче или приему информации. Помимо сигнальных линий, в кабеле имеется несколько шин общего провода (выводы! 19, 22, 24, 26, 28, 30 и 40), а также ключ (20) — срезанный вывод в приборной (штыревой! части разъема).
Подключение накопителей к интерфейсе IDE / EIDE . В стандарте АТА предусмотрено параллельное подключение двух накопителей к аи дому каналу (кабелю) IDE-интерфейса. На рисунке. 2 показан типичный кабель, используемый для соединения накопителей с IDE-контроллером. По традиции ведущий накопитель подключают к концевому разъему кабеля, а ведомый — к среднему. На самом деле это не более чем дань единообразию, поскольку сточки зрения IDE-интерфейса оба разъем! эквивалентны, и любой накопитель может быть подключен к любому из них. Необходимо лишь с помощью перемычек строить накопитель как ведущий или ведомый, Длина плоского кабеля с 40-контактными разъемами не должна превышать 60 см. Поскольку в IDE накопителях для обеспечения необходимых параметров электрических сигналов иcпользуется так называемая распределенная нагрузка (т.е. нагрузочные резисторы устанавливаются во всех устройствах), нет необходимости устанавливать или удалять кие либо согласующие сопротивления. Несмотря на всю простоту IDE-интерфейса, в некоторых случаях вы можете, столкнуться с определенными проблемами при совместном подключении двух накопителей Старые IDE-накопители не вполне соответствуют стандартам САМ С ATA IDE. Присоединении к одному кабелю двух старых жестких дисков (особенно если они выпущены разными фирмами) из-за различий в интерпретации настроек ведомый/ведущий между ними может возникнуть конфликт, в результате которого оба накопителя в большинстве случаев окажутся неработоспособными. При подключении двух IDE-накопителей старайтесь использовать новые устройства, выпущенные одной и той же фирмой.
ведущий ведущий
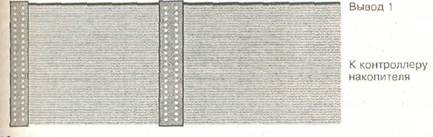
Рисунок 2. Шлейф передачи данных и сигнала управления интерфейса IDE/EIDE
ATAPI
Одним из существенных недостатков стандарта АТА было то, что он предназначался только для жестких дисков. В конце 1980-х годов в связи с широким распространением дисководов CD-ROM перед разработчиками возникла серьезная проблема. Нужно было найти способ подключения этих устройств и других накопителей (например, на магнитной ленте) к существующим IDE-интерфейсам, либо изобретать специализированные интерфейсы контроллеров. В результате был разработан стандарт ATAPI, являющийся расширением интерфейса АТА и позволяющий подключать к обычному IDE-порту не только жесткие диски, но и другие устройства. Впрочем, разница между жесткими дисками и прочими устройствам и все же существует. Если поддержка первых предусмотрена в системной, то для работы остальных АТАРI -устройств нужны специальные драйверы. Загрузка компьютера с АТАР1 -дисковода CD-ROM возможна только с накопителей, соответствующих стандарту EIDE, и при использовании в компьютере последних версий BIOS.
ATA -2, FAST - ATA и EIDE
Вначале 1990-х годов технологии производства накопителей на жестких дисках древнего уровня, что стало ясно — архитектура АТА в самом скором времени перестали соответствовать их возможностям. Выходом из сложившейся ситуации стала стандарта АТА-2, который можно рассматривать как расширение первоначальной версии АТА. Внесенные в новый стандарт дополнения существенно улучшили параметры интерфейса. В нем определены более быстрые режимы передачи данных программного ввода/вывода (Р I/O — Programmed I/O) и с использованием прямого доступа к памяти (DMA), добавлены новые команды для накопителя (в частности, команда “Identify Drim”, позволяющая BIOS автоматически распознавать тип и определять параметры жесткого диска, введен второй канал для подключения дисководов, предусмотрен специальный режим блочной передачи данных (Block Transfer Mode) и определены новые способы обращения к секторам на жестком диске с использованием логической адресации блоков (LBA — Logical Block Addressing). Логическая адресация блоков стала самым эффективным средством для преодоления традиционно существовавшего ограничения емкости жесткого диска в 504 Мбайт. Несмотря настоль впечатляющие усовершенствования, в стандарте АТА-2 для подключения накопителей используются те же самые 40-контактные разъемы, что и в предыдущей версии, а старые IDE-накопители полностью совместимы с новым интерфейсом. Наряду с АТА-2, можно встретить два других названия этого интерфейса: EIDE (Enhanced IDE— улучшенный IDE) и Fast-ATA (быстрый А ТА). Это не другие стандарты, а просто разные реализации стандарта АТА-2. Версия E1DE была разработана фирмой Western Digital на базе как стандарта АТА-2, так и ATAPI. Она оказалась настолько удачной, что аббревиатурой EIDE стали обозначать все модернизированные варианты интерфейса IDE. Фирмы Seagate и Quantum сосредоточили свои усилия на разработке реализации Fast-ATA стандарта АТА-2.
Ее отличие от EIDE заключается в том, что она разрабатывалась только на основе стандарта АТА-2. С практической точки зрения разницы между АТА-2, EIDE и Fast-ATA нет, поэтому часто эти названия используются как синонимы (хотя с технической точки зрения это не совсем корректно).
Ограничение емкости накопителей на уровне 504 Мбайт в классическом IDE -интерфейсе. Предел в 504 Мбайт (528 Мб в десятичных единицах), являющейся, возможно, наиболее существенным ограничением в рамках традиционной IDE-архитектуры, возник из-за несогласованности действий разработчиков BIOS и создателей архитектуры контроллера накопителей WDI003. Чтобы уяснить суть этого ограничения, необходимо понять, как осуществляется адресация данных в IDE-накопителях. Классической схемой адресации является схема CHS (Cylinder, Head, Sector— цилиндр, головка, сектор). Проще говоря, необходимо ввести в регистры контроллера WDI003 необходимые вам номер цилиндра, номер головки и номер сектора, а затем через программное прерывание 1NTI3 вызвать из BIOS процедуру, перемещающую головки накопителя на заданный сектор для считывания или записи информации.
В теории все выглядит прекрасно, но на практике возникает проблема. Дело в том, что предельные значения количества цилиндров, головок и секторов в BIOS и в контроллере WD1003 разные. В табл. 2 приведены эти значения и показаны итоговые ограничения на доступное дисковое пространство накопителя с классическим IDE-интерфейсом. В BIOS определены следующие максимальные значения: 1024 цилиндров, 256 головок и 63 сектора на дорожку. Если перемножить все эти числа, а результат затем умножить на 512 (количество байт в секторе), то получается, что теоретический предел ограничения емкости накопителя на уровне BIOS составит 8 455 716 864 байт (примерно 7,88 Гбайт или 8,4 Гб в десятичных единицах). Контроллер WD1003 может работать с 65536 цилиндрами, 16 головками и 256 секторами на дорожке, т.е. теоретическая емкость накопителя составляет 128 Гбайт (137 Гб).
Проблема заключается в том, что каждый из параметров накопителя ограничивается на минимальном уровне. Так, максимально доступное количество цилиндров оказывается равным 1024, максимальное количество головок — 16, а максимальное количество секторов 63.
Если перемножить эти три числа, а результат умножить на 512, то получим шину 504 Мбайт (528 Мб). Если бы разработчики BIOS и контроллера WDI003 заранее «договорились о единых предельных значениях параметров накопителей, то проблема «была устранена, даже не возникнув, и предел емкости IDE-накопителей изначально казался бы равным 128 Гбайт. Но реальность, увы, такова, что доступное дисковое пространство стандартных IDE-накопителей в сочетании со старыми версиями BIOS соответствует всеголишь 504 Мбайт.
Таблица 2. Ограничения на параметры и емкости накопителей
| BIOS | WD1003 | Итоговое ограничение | |
| количество цилиндров | 1024 | 65536 | 1024 |
| количество головок | 256 | 16 | 16 |
| количество секторов | 63 256 | 63 | |
| максимальная емкость | 7,88 Гбайт (8,4 Гб) 128 Гбайт (137 Гб) | 504 Мбайт (528 Мб) | |
Из приведенных расчетов становится ясно, почему к IDE-интерфейсу можно без проблем подключать накопители емкостью до 504 Мбайт — и не более. Конечно, существуют методы преодоления этого ограничения. Поскольку BIOS по своей сути является программным обеспечением, наиболее простой и экономичный способ преодоления барьера шит в расширении возможностей процедур 1NT13, за счет запуска специализированного драйвера в момент загрузки компьютера. Доработка процедур, вызываемых через прерывание 1NT13, позволяет работать с накопителями, емкость которых превышает 7,88 Гбайт. Наиболее популярными драйверами такого типа, являются Drive Rocket и Disk Manager фирмы Ontrack, которые позволяют персональному компьютеру обращаться к открытому дисковому пространству больших – IDE накопителей, а не только к первым 504 Мбайт. интерфейсов EIDE и UDMA допускается работа с оверлейными (обеспечивающий адресацию дискового пространства свыше 504 Мбайт) драйверами, причем драйвер Disk Manager (или подобные ему) часто входят в комплект поставки современных жестких дисков большой емкости. Однако есть несколько причин, по которым нежелательно использовать такие оверлейные драйверы. Во-первых, они обычно занимают часть очень ценной общий оперативной памяти в пределах первых 640 Кбайт, поскольку далеко не во всех системах для них находится свободное место в верхней памяти (UMA — Upper Memory Area). Во-вторых, старые оверлейные драйверы не всегда хорошо работают с операционными системами Windows, что приводит к традиционным проблемам совместимости жестких дисков большой емкости с Windows. В-третьих, оверлейные драйверы могут конфликтовать с заданными в память драйверами других устройств и резидентными программами, В конечном счете, наиболее предпочтительным способом введения поддержки накопителей большой емкости в интерфейсах EIDE и UDMA является модернизация BIOS до версии с усовершенствованными процедурами, вызываемыми через прерывание INT13. AMI и Micro Firmware первыми начали выпускать системные BIOS, совместимые с IDE, однако впоследствии поддержка стандарта EIDE стала неотъемлемым свойством для BIOS и контроллеров накопителей. В настоящее время общепринятой нормой стала поддержка режима UDMA/66 при соблюдении обратной совместимости с EIDE и IDE. Хотя замена BIOS — операция более сложная, чем установка драйвера, в большинстве случаев она себя полностью оправдывает (экономится память и обеспечивается лучшая совместимость с операционными системами). Разумной альтернативой модернизации теперяашной BIOS может стать замена контроллера накопителей, т.е. установка нового собственного встроенного BIOS и модернизированными процедурами, вызываемыми через прерывание INT13. Фирмы AMI и Micro Firmware первыми начали выпускать системные BIOS, совместимые с EIDE, однако впоследствии поддержка стандарта EIDE стала неотъемлемым свойством BIOS и контроллеров накопителей. В настоящее время общепринятой нормой стала поддержка режима UDMA/66 при соблюдении обратной совместимости с EIDE и IDE. Хотя замена BIOS — операция более сложная, чем установка драйвера, в большинстве случаев она себя полностью оправдывает (экономится память и обеспечивается лучшая совместимость с операционными системами). Разумной альтернативой модернизации стaндартной BIOS может стать замена контроллера накопителей, т.е. установка нового BIOS.
Логическая адресация блоков ( LBA ). Еще одной особенностью режимов EIDE и UDMA, вызывающей наибольшее количество вопросов, является необходимость использования LBA. Если при CHS-адресации необходимо задавать номера цилиндров, головок и секторов, то при адресации LBA задается абсолютный номер сектора (например, «перейти к сектору 324534»). Соответствующие CHS-координаты сектора рассчитываются по алгоритму LBA, реализованному в BIOS. Метод LBA является единственно возможным при использовании операционных систем DOS и Windows, работающих с таблицами размещения файлов (FAT-Fit Allocation Table). Из этого следует, что если вы хотите работать с накопителями большой емкости, то вам необходимо обновить системную BIOS или использовать EIDE/UDMA-контроллер с собственной встроенной BIOS. С другой стороны, операционные системы не использующие FAT (такие, как OS/2 и Novell NetWare), не нуждаются в LBA. Если вы посмотрите на плату ElDE-контроллера, то увидите на ней перемычку, с помощью которой можно включить или отключить режим LBA. При использовании DOS или Windows эту перемычку необходимо установить в положение «включено».
На платах современных контроллеров с поддержкой режима UDMA перемычка для включения LBA отсутствует. Для его активизации необходимо: войти в программу настройки параметров BIOS, найти соответствующую строку и пометить режим LBA как разрешенный. При выборе метода адресации (CHS или LBA) следует учитывать структуру используемого накопителя (или накопителей). Если вы выберете метод LBA, то вам придется заново разбить жесткий диск на разделы и отформатировать. Необходимо также помнить что отформатированный в режиме LBA накопитель будет опознаваться только в тех компьютерах, в которых предусмотрена поддержка LBA.
Таким образом, если накопитель, отформатированный в режиме LBA (EIDE), установить в компьютер, в BIOS которого поддержка LBA не предусмотрена (т.е. в старую IDE-систему), то такой накопитель не будет опознан, и вам придется вновь разбивать его на разделы и форматировать, Во всех случаях прежде чем внедрять в систему интерфейс EIDE, необходимо выполнить полнее резервное копирование всех жестких дисков.
Подключение различных накопителей. Одним из традиционных преимуществ интерфейса SCSI была возможность подключения к одной шине до 7 различных устройств (жестких дисков, дисководов CD-ROM, накопителей на магнитной ленте и пр.). Такой подход позволил избежать многих трудностей, присущих интерфейсам других типов; увеличения количества отдельных плат контроллеров и проблем с конфигурированием системы. Классический IDE-контроллер может обслуживать два накопителя (ведущий и ведомый), подключенных к одному порту ввода/вывода (IFOH) и к одной линии запроса прерывания IRQ14 (IRQ— Interrupt Re Quest). В интерфейсах ЕIDЕ и UDMA это ограничение преодолено за счет добавления в контроллер второго канала.
Необходимо быть внимательным при использовании двухканального контроле ра. Если первичный (основной) канал в состоянии нормально обслуживать быстродействующие устройства, то это еще не означает, что вторичный (дополнительный) канал буш вести себя точно также, Например, во многих EIDE-контроллерах прежних лет выпуска была предусмотрена полная поддержка ЕIDЕ-накопителей на первичном канале то к вторичному каналу можно было подключать только устройства в стандарте АТАРI. В настоящие время иногда встречаются контроллеры UDMA/66, которые могут обслужит до двух UDMА/66-устройств, подключенных к первичному каналу, но их вторичный канал может работать только в режимах UDMA/33 или EIDE. Загляните в описание контроллера, прежде чем подключать к нему новые устройства. Теоретически старый IDE-накопитель должен работать на EIDE-канале, но может возникнуть проблема при подключении к такому каналу одновременно EIDE и IDE-устройств.
Классическим примером может служить система, в которой новый быстродействующий жесткий диск EIDE-типа (ведущее устройство) подключен к тому же каналу, что ATAPI дисковод CD-ROM (ведомое устройство). В большинстве случаев более медленный дисковод CD-ROM будет «мешать» EIDE-накопителю, снижая максимальную скорость обмена данными с жестким диском, что отрицательно скажется на общей производительности системы. Не исключено, что дисковод CD-ROM не будет опознаваться системой. В крайних случаях не будет опознаваться жесткий диск (возможно, что и дисковод CD-ROM тоже), и компьютер не сможет даже загрузиться. Такого рода проблемы почти всегда удастся устранить, подключив дисковод CD-ROM к вторичному каналу контроллера в качестве ведущего устройства. В настоящее время UDMA/33 и UDMA/66-контроллеры стали более интеллектуальными. И способны подстраивать скорости обмена данными с различными по быстродействию устройствами, подсоединенными к одному каналу. Однако проблема совместимости устройств с разным быстродействием устранена не полностью. Например, при подключении к одному каналу жесткого диска UDMА/66 и устройства, не соответствующего требованиям UDMA/66, может привести к снижению максимальной скорости передачи данных до уровня интерфейса UDMA/33.
Следует руководствоваться следующим правилом: к первичному каналу контролера подключать только быстродействующие устройства, а более медленные—к вторичному каналу.
ATA -3
Более поздней версией АТА является стандарт АТА-3. В нем не предусмотрены дополнительные режимы передачи данных по сравнению с АТА-2, а лишь повышена надежность программного ввода/вывода (PI/O). В АТА-3 предусмотрена простая схема защиты с помощью пароля, расширены возможности управления энергопотреблением, а также определена методика повышения надежности работы жестких дисков, основанная на предсказании сбоев в их работе (SMART— Self Monitoring Analysis and Repor Technology). Стандарт АТА-3 совместим с устройствами АТА-2, ATAPI и АТА. Поскольку АТА-3 не определены новые режимы передачи данных, то к нему также часто применяют общее название EIDE (хотя с технической точки зрения это некорректно).
ULTRA - ATA /33
Повышение скоростей передачи данных — процесс бесконечный. Его очередным этапом стало появление стандарта Uitra-ATA, который представляет собой реализацию ATA/ATAPI-4. В соответствии с этим стандартом в версии, обычно называемой Ultra-DMA/33 или UDMA/33, максимальная скорость передачи данных в режиме DMA управления шиной (bus mastering) составляет 33 Мбайт/с. Чтобы все возможности интерфейса Ultra-АТА были реализованы, требованиям стандарта должны удовлетворять накопитель, и контроллер, и системная BIOS. При этом Uitra-ATA полностью обратно совместим с предшествующими стандартами АТА. Для подключения накопителей DDMA/33 можно использовать обычные IDE-кабели с 40-контактными разъемами, имейте в виду, что в перечисленных ниже ситуациях вы можете столкнуться с определенными проблемами:
1) Используется стандартный кабель, однако его качество невысокое, он поврежден или помят в результате многочисленных переустановок
2) Убедитесь в том, что накопитель, способный работать в режиме Ultra-ATА/66, настроен на соответствующую скорость передачи данных. Некоторые накопители поставляются с отключенным по умолчанию режимом UDMA/66, и для его активизации вам придется переставить перемычки или воспользоваться вспомогательной программой.
ULTRA - ATA /66
В EIDE-режимах (РI0-3 и PI0-4) предусмотрена возможность использования канальной линии управления потоком данных IORDY (Input/Output channel ReaDY). Это означает, что накопитель в состоянии приостанавливать работу контроллера (передавая соответствующий сигнал по линии IORDY) в том случае, если он еще не готов к приему или выдаче очередной порции данных. Если в интерфейсе не предусмотрено использование линии IORDY (т.е. либо накопитель не передает по ней свои сигналы, либо контроллер не определяет ее состояние), то это может привести к искажению данных в режимах быстрого Р I/О, и вам придется ограничиться более медленными режимами работы. Выбирая накопитель и контроллер EIDE, проверьте, предусмотрено ли ни использование линии IORDY.
В отличие от P I/O, обмен данными с использованием DMA означает, что данные передаются непосредственно между накопителем и памятью, без участия процессора в качестве в посредника. В истинно многозадачных операционных системах, таких как OS/2, Windows NT/2G00/XP или Linux, процессор при DMA-обменах с накопителями остается свободным и может выполнять полезную работу. В среде DOS и Windows 95/98/ Ме процессор в любом случае вынужден ждать, пока не завершится передача данных, поэтому в этих операционных системах выигрыш от DMA-обменов не столь велик, как при многозадачной работе. Существует два способа прямого доступа к памяти: обычный и с захвата управления шиной. При обычном DMA все операции по координации доступа к обшей шине, ее передаче данных выполняет контроллер прямого доступа к памяти (DMA-контроллера расположенный на системной плате. При DMA с захватом управления шиной эти операции выполняются логическими схемами, находящимися в контроллере накопителей.
К сожалению, быстродействие DMA-контроллера в традиционной системе с шиной ISA невелико, и его нельзя использовать для обслуживания современных жестких дисков Платы контроллеров, предназначенные для шины VL(VESA Local Bus), вообще не обслуживаются DMA-контроллером и могут работать только в режиме DMA с захватом управления шиной. не менее, в табл. 3 перечислены для справки возможные DMA-режимы передачи данных.
Скорость передачи данных
Производительность накопителя напрямую зависит от скорости обмена данными и остальными компонентами компьютера. Общее быстродействие канала связи системой и накопителем зависит от двух составляющих; скорости, с которой данные считываются с магнитного диска, и скорости обмена данными между накопителем контроллером, расположенным на системной плате. Скорость обмена данными между шинами дисками и буфером накопителя обычно меньше, чем темп передачи данных между накопителем и контроллером. У старых жестких дисков ее величина редко превышала 5 Мбайт/с. У новых устройств, выполненных в стандарте Ultra-ATА (например, DiamondMax 2160 фирмы Maxtor), она достигает 14 Мбайт/с.
Скорость передачи данных накопителя к контроллеру (быстродействие интерфейса), как правило, значительно выше. У старых жестких дисков ее величина лежала в пределах от 5 до 8 Мбайт/с, устройства в стандарте АТА-2 (EIDE) могут работать со скоростью до 16 Мбайт/с. Накопители Ultra-DMA/33 могут обмениваться данными с контроллерами со скоростью 33 Мбайт/с, Uira-DMA/66 — 66 Мбайт/с.Существующие на сегодняшний день режимы обменов данных включены в стандарты IDE/EIDE и, как говорилось выше, называются режимами
программного ввода/вывода (Р I/O) и прямого доступа к памяти (DMA). Характеристики различных режимов Р O/I обмена данными между накопителями и контроллерами приведены в таблице 3.
Таблица 3. Скорости передачи данных в различных режимах
| Режим PIO | Время цикла, нс | Скорость передачи, Мбайт/с | Примечание |
| 0 | 600 | 3,3 | Старые режимы АТА (IDE) |
| 1 | 383 | 5,2 | |
| 2 | 240 | 8,3 | |
| 3 | 180 (IORDY) | Новые режимы АТА 2 (EIDE) | |
| 4 | 120 (IORDY) | 16,6 | |
| Режим DMA (Single Word) 0 | 960 | 2,1 | Предусмотрен в АТА |
| 1 | 480 | 4,2 | |
| 2 | 240 | 8,3 | |
| (Multi Word)0 | Предусмотрен в АТА | ||
| 1 | 150 | 13,3 | |
| 2 | 120 | 16,6 | |
| 3 | - | 33 | Ultra DMA/33 |
| 4 | - | 66 | Ultra DMA/66 |
Установка контроллера
Подготовка к установке нового контроллера
На большинстве современных системных плат монтируются двухканальные контроллеры, к которым, как правило, можно подключать практически все имевшиеся в продаже (на момент разработки платы) накопители. Однако со временем появляются новые типы накопителей, увеличивается их емкость, внедряются более скоростные режимы передачи данных. Все это может привести к тому, что возможности контроллера на системной плате окажутся недостаточными для обеспечения полноценной работы новых устройств, него надо будет заменить. Установка нового контроллера может потребоваться и в случае выхода из строя существующего контроллера.
Хотя новый контроллер теоретически должен нормально работать с уже установленными накопителями, в некоторых обстоятельствах установка нового контроллера может привести к возникновению проблем. Особенно часто это происходит в тех случаях, когда старый контроллер не демонтирован или не отключен надлежащим образом, либо когда схема адресации нового контроллера несовместима с текущими настройками накопителей. Прежде чем распаковать новый контроллер и приступить к его установке, потратьте некоторое время на подготовку вашей системы.
1. Выполните резервное копирование данных, хранящихся во всех накопителях. Прежде чем приступать к каким либо работам, связанным с накопителями, сохраните всю ценную информацию на магнитной ленте, CD-ROM, сменных дисках или на других подходящих носителях. Запустите программу настройки BIOS и запишите параметры геометрических моделей всех жестких дисков (возможно, впоследствии вам придется вводить их заново).
2. Подготовьте программное обеспечение. Держите под рукой дистрибутивный CD-ROM с Windows, который может вам понадобиться для переустановки операционной системы или для загрузки новых драйверов после установки контроллера. Если к новому контроллеру прилагаются собственные драйверы, то, вам, естественно, нужно подготовить соответствующий диск (возможно, новейшие версии драйверов придется загрузить с Web-сайта фирмы-производителя контроллера).
3. Исследуйте установленный в системе контроллер Очевидно, что перед установкой нового необходимо демонтировать старый контроллер или отключить его, Просмотрите документацию на систему и разберитесь в том, как это правильно сделать. Если контроллер интегрирован в системную плату, то его обычно можно отключить через программу настройки параметров BIOS. На старых системных платах устанавливались ответствующие перемычки. Контроллеры, выполненные в виде отдельной платы расширения, просто демонтируются.
4. Предварительно настройте новый контроллер. Изучите документацию на новый контроллер. Если он является многофункциональным устройством (на той же самой плате могут быть смонтированы еще и контроллер накопителей на гибких дисках, параллельный, игровой и последовательные порты), то вам нужно отключить те узлы, которые не планируется использовать. Каждый из них использует системные ресурсы, поэтому лишние функциональные блоки необходимо отключить во избежание конфликтов с аналогичными устройствами на системной плате.
5. Проверьте версию BIOS . Версии BIOS обновляются довольно часто. Выясните у фирмы-изготовителя нового контроллера, потребуется ли после его установки обновлять версию BIOS.
Основы технологии RAID
Традиционным способом сохранения ценной информации является резервное копирование — длительная и утомительная процедура переноса содержимого жесткого диска на магнитную ленту или другие носители. Этот метод вполне оправдан, и его надежность не вызывает сомнений — но лишь при условии соблюдения всех правил и требований, Нередко пользователи забывают делать резервные копии или делают это неправильно, Даже при автоматизации этого процесса на определенных этапах требуется вмешательство человека. Несмотря на принимаемые меры, нередко при неисправностях жестких дисков часть данных все-таки теряется. Одним словом, резервное копирование данных— отнюдь не панацея от всех бед. Ничто не мешает вам всегда иметь под рукой несколько абсолютно идентичных копий данных в разных накопителя! Если один из них (основной) выйдет из строя, то данные могут быть считаны с другого (запасного) накопителя. В этом и заключается основная идея использования дисковых массивов с избыточностью (RAID).Основной недостаток RAID заключается в их достаточно высокой стоимости. Для них нужен соответствующий контроллер (например, FastTrack66 фирмы Promise Technologies для накопителей U DMА/66) и некоторое количество запасных жестких дисков для хранения копий данных. При этом дополнительные накопители не расширяют дисковое пространство системы, а только дублируют основные устройства, потребляя дополнительную энергию от блока питания и занимая место в корпусе компьютера, Обычные пользователи редко используют такой дорогостоящий способ защиты своих данных.
Массивы RAID чаще всего устанавливают в серверах и активно эксплуатируемых рабочих станциях.
Дисковые массивы
Дисковый массив представляет собой группу из двух или более жестких дисков, которые воспринимаются системой как один накопитель. Преимущества массива заключаются в большей производительности и повышенной надежности хранения данных. Производительность повышается за счет распределения нагрузки в процессе обмена данными между несколькими физическими устройствами. Повышение надежности достигается за счет избыточности операций с данными. Это означает, что в случае отказа или ошибки присчитывании на одном или нескольких накопителях копия данных может быть найдена на другом или на других жестких дисках. Для получения оптимального результата необходимо формировать массив из идентичных жестких дисков. Накопители с одинаковыми характеристиками лучше работают в единой «команде». Отдельные жесткие диски, входящие в состав массива, называются его элементами. В резервных секторах каждого жесткого диска записывается конфигурационная информация, позволяющая идентифицировать его как элемент данного массива.
Адаптеры дисковых массивов
Контроллеры RA1D обычно называют адаптерами дисковых массивов (DAA — Disk Array Adapter). Это специализированные устройства, разработанные для обеспечения работы совокупностей дисковых накопителей (массивов). Большинство RAID-контроллеров работает в стандарте SCSI, но существует и контроллер FastTrack66 фирмы Promise Technologies, к которому можно подключить массив из жестких дисков типа U DMA/66. Практически на всех контроллерах имеется собственная BIOS, обеспечивающая взаимодействие недельными накопителями (вплоть до UDMA/66). В BIOS, как правило, предусмотрена программа настройки (аналогичная программе настройки параметров системной BIOS), позволяющая настраивать функции RAID-контроллера.
Резервный сектор
На каждом жестком диске массива в определенном месте, называемом резервным сектором, записывается важная информация. В этой области хранятся данные о конфигурации массива, причем не только сведения, относящиеся к данному накопителю, но и данные, описывающие все остальные накопители, входящие в состав RAID. Если данные из резервного сектора какого-либо элемента массива будут повреждены или потеряны, то их можно будет восстановить из избыточных копий, хранящихся на других дисках. Как правило, в массивах все диски равноправны. Вы можете подключать накопители к любым разъемам RAID-контроллера без перенастройки массива.
Типы дисковых массивов
Типичный RAID-контроллер может обеспечивать четыре основных режима работы массива: расщепление, дублирование, расщепление/дублирование» связывание. От выбора режима зависит емкость массива, его быстродействие и надежность хранения данных. Чтобы оценить возможности технологии RAID, необходимо более детально познакомиться с основным и режимами работы массивов.
Расщепление ( режим RAID О ). В режиме расщепления секторы данных распределяются вперемежку между несколькими элементами массива, в результате чего из двух или более небольших жестких дисков. Формируется один большой накопитель. Расщепление — это метод увеличения быстродействия массива по сравнению с одиночным накопителем, не сказывающийся, однако, на надежности хранения данных. Быстродействие в этом режиме повышается за счет того, что все операции сданными распределяются между элементами массива, т.е. во всех накопителях одновременно выполняется считывание или запись своей порции данных, Массивы такого типа используются в высокопроизводительных системах. Для достижения лучшей производительности (и большей эффективности хранения данных) в массиве рекомендуется использовать идентичные накопители. Общая емкость дискового массива равна количеству его элементов, умноженному на емкость наименьшего накопителя. Например, емкость массива, состоящего из одного диска емкостью 1 Гбайт и трех дисков емкостью по 1,2 Гбайт, составит 4 Гбайт (4х1 Гбайт). Недостатком режима RAID О является отсутствие избыточности — отказ одного из дисков приведет к выходу из строя всего массива, поскольку некоторая часть общего «накопителя» будет потеряна.
Дублирование ( режим RAID 1). В режиме дублирования запись информации происходит одновременно на два диска, а считывание ведется параллельно с двух накопителей (за счет чего повышается быстродействие массива). Достоинством режима RAID l является повышенная надежность хранения данных, поскольку в массив записываются две их копии, а каждый элемент массива подключается к отдельному разъему. RAID-Контроллер (частности, FastTrack66) выполняет считывание данных, распределяя операции между отдельными накопителями таким образом, чтобы увеличить эффективность работы массива по сравнению с жестким одиночным диском. После прихода запроса на считывание данных контроллер выберет тот накопитель, головки записи,/воспроизведения которого окажутся на данный момент ближе к требуемым данным, одновременно отдавая команду незанятому диску подготовиться к чтению следующей порции данных.
Если один из элементов массива выйдет из строя из-за механической неисправности (например, отказа шпиндельного двигателя) или перестанет отвечать на запросы, то оставшийся исправным накопитель продолжит функционировать. Это свойство дискового массива называется отказоустойчивостью, Если в одном из накопителей возникнет ошибка при считывании сектора, то данные будут «позаимствованы» с дублирующего диска. При следующей загрузке компьютера программа обслуживания RAID-системы выдаст сообщение о неисправности в дисковом массиве и порекомендует заменить неисправных накопитель. Вы, конечно, можете проигнорировать это предупреждение и продолжить работу, хотя лучше все-таки постараться заменить неисправный диск как можно быстрее,
Наличие избыточности приводит к тому, что емкость массива дисков оказывается равной половине суммарной емкости входящих в него отдельных дисков. Например, два накопителя емкостью п.o l Гбайт каждый образуют массив дисков емкостью в 1 Гбайт. При использовании накопителей разной емкости часть дискового пространства большего из них может остаться неиспользованной.
Резервный диск. В режиме RAID l к контроллеру можно подключить дополнительный накопитель, который будет играть роль горячего резерва, не являясь при этом элементом массива. Такой накопитель предназначен для замещения неисправного элемента дискового массива, и при обычной работе находится в состоянии ожидания (например, его шпиндельный двигатель может не вращаться). В большинстве случаев подмена неисправного диска происходит автоматически — на резервное устройство немедленно копируются все данные с работающего накопителя. Впоследствии, выключив. Компьютер, вы сможете заменить неисправный накопитель новым.
Резервный диск должен иметь емкость, равную емкости наименьшего диска массива (поскольку общая емкость массива в режиме RAID 1 определяется именно его наименьшим элементом.
Расщепление / дублирование ( режим RAID 0+1). Из названия режима следует, что он является комбинацией двух описанных выше режимов. Этот режим отличается повышенной производительностью за счет распараллеливания операций считывания и записи и надежностью хранения данных (за счет их избыточности). Дисковый массив RAID О+l должен состоять, как минимум, из четырех накопителей (двух пар). Внутри каждой пары данные расщепляются, и каждая пара является дубликатом другой. В этом режиме емкость массива равна емкости пары расщепленных исков (половине суммарной емкости всех накопителей), поскольку вторая пара используется лля хранения избыточных данных.
Связывание дисков. Массив связанных дисков или 5BOD Just a Bunch Of Drives: представляет собой группу из нескольких накопителей, которые могут иметь разную емкость. В этом режиме происходит последовательное заполнение дисков массива: сначала данными заполняется один накопитель, затем следующий и т.д. В этом режиме не повышается ни производительность системы, ни надежность хранения данных, Если выходит из строя один накопитель, то это сказывается на всем массиве. F Тем не менее, в некоторых случаях этот режим может быть полезен с точки зрения повышения производительности системы. В режиме RAID 0 быстродействие массива зависит ог размеров расщепленных блоков данных. Размеры блоков определяются тем, как обычно осуществляются обмены данными с накопителем, т.е. являются ли они, в основном, последовательными или случайными. Если их тип непредсказуем и последовательные и случайные обмены чередуются произвольным образом, то производительность расщепленного массива будет изменяться. В конечном счете, вы можете вообще не получить никакого выигрыша по сравнению с одиночным накопителем. Производительность же связанного массива полностью определяется параметрами отдельного накопителя. Скорость передачи данных в этом случае является более предсказуемой и, кроме того, в связанных массивах допускается использование разнотипных накопителей.
Техника Безопасности
При удаление/подключении S-ATA контроллера надо прибегать к техникам безопасности в противном случае можно сделать неработоспособным системный блок.
Техника Безопасности состоит в следующем:
1) При удаление старого контроллера необходимо в первую очередь обесточить системный блок.
2) Снять статическое напряжение с рук (подержаться руками за корпус системного блока), в противном случае это может привести к неработоспособности контроллера.
3) Расчистить место вокруг удаляемого контроллера т.е. убрать лишнюю проводку, в противном случае удалить контроллер будет трудно.
4) Вытащить удаляемый контроллер, прибегая к минимальным усилиям. Вытаскивайте его осторожно чтобы не повредить его
Заключение
Существует огромное количество интерфейсов жестких дисков, соответственно для каждого интерфейса существует свой контроллер. Соответственно установив соответствующие контроллеры в материнскую плату, мы можем к ним подключить различные устройства (жесткий диск), не имея таких контроллеров мы соответственно не сможем подсоединить эти устройства. Зная что подсоединять эти платы расширения надо согласно техники безопасности, но, даже установив эти контроллеры согласно техники безопасности нет гарантии что они у вас заработают по этому необходимо еще и программное обеспечение. Только обеспечив хорошую аппаратную и программную часть можно достичь качественной и надежной работы со стороны контроллеров, а также устройств подсоединенных к ним.
ГОУ СПО Тульский государственный машиностроительный
колледж им. Н.Демидова
Курсовая работа
по учебной дисциплине: Компоновка ЭВМ и ПК
Тема: Интерфейс Serial ATA
Выполнил студент группы гр. 12831
Тула 2007
Содержание
Введение
1. Семейство IDE-контролеров
1.1 IDE/ATA
1.2 ATAPI
1.3 ATA - 2, FAST – ATA, EIDE
1.4 ATA-3
1.5 ULTRA-ATA/33
1.6 Ultra-ATA/66
1.7 Скорость передачи данных
2. Установка контроллера
2.1 Подготовка к установке нового контроллера
2.2 Установка нового контроллера
2.3 Конфигурирование нового контроллера
2.4 Установка программного обеспечения
2.5 Модернизация BIOS контроллера
3. Основные технологии RAID
3.1 Дисковые массивы
3.2 Адаптеры дисковых массивов
3.3 Резервный сектор
3.4 Типы дисковых массивов
4. Поиск неисправностей интерфейса Serial-ATA
5. Техника безопасности
6. Тестирование системы на наличие S-ATA
Список использованной литературы
Заключение
ВВЕДЕНИЕ
Современный информационный мир невозможно представить без персональных компьютеров, микро ЭВМ, поскольку их значение имеет важную роль в современном информационном мире. Канули в лету те времена, когда ЭВМ занимали целые здания, но на сегодняшний день нам они представлены в виде микро ЭВМ, очень много времени прошло и много изменений произошло на этом промежутки времени, одно поколение компьютеров сменялось другим совершенствовалось практически все от внешнего вида до его возможностей.
Условно части ЭВМ можно разделить на основные устройства и периферийные. К основным устройствам относят процессор и память, а к периферийным все остальное, в том числе и устройства для долговременного хранения данных (жесткий диск). Невозможно представить без жесткого диска современный ПК, так как вся информация располагалась именно на нем, в том числе и Операционная Система, которая осуществляет непосредственный интерфейс между пользователем и аппаратной части ЭВМ, то присутствие жесткого диска на ПК просто необходимо. Существует различное множество жестких дисков, соответственно существует и множество интерфейсов винчестеров, среди которых и встречается Serial ATA.
Новой (относительно) разработкой в области интерфейсов винчестеров является интерфейс SerialATA. В отличие от своего предшественника Parallel ATA, Serial ATA использует последовательную передачу данных, а не параллельную, что подразумевает сокращение числа необходимых для соединения устройств проводников
Дата: 2019-07-24, просмотров: 338.