Введение.
Современные автоматизированные электроприводы представляют собой сложные динамические системы, включающие в себя различные линейные и нелинейные элементы (двигатели, генераторы, усилители, полупроводниковых и другие элементы), обеспечивающие в своем взаимодействии разнообразные статические и динамические характеристики.
Электропривод по системе Г-Д с тиристорным возбуждением генератора находит широкое применение во многих отраслях промышленности. Достаточно сказать, что большинство мощных электроприводов постоянного тока различного назначения выполнены по системе Г-Д. Это объясняется рядом ее важных преимуществ по сравнению с другими приводами;
-высокая жесткость механических характеристик;
-ббольшой диапазон и плавность регулирования скорости;
-отсутствие пусковых сопротивлений и потерь энергии в них;
-простота реверса двигателя без переключений в цепи якоря;
-ппростота перевода привода в режимы торможения с рекуперацией энергии в сеть;
-относительная простота схемного решения системы управления приводом, не требующая высокой квалификации обслуживающего персонала. Наряду с перечисленными достоинствами система Г-Д не лишена существенных недостатков, к числу которых относятся:
- недостаточное быстродействие привода;
- неустойчивая работа двигателя в зоне низких скоростей, ограничивающая диапазон регулирования;
- низкий коэффициент полезного действия, не превышающий 75-80%;
- высокая установленная мощность, равная трехкратной мощности регулируемого двигателя; - большая занимаемая площадь.
Расчет и выбор силового электрооборудования привода. Выбор двигателя.
Исходные данные:
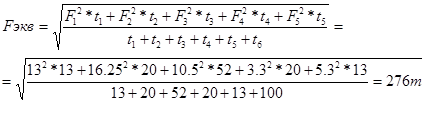
F1=13т; F2=16.25т; F3=10.5т; F4=3,3т; F55.3т
t1=13сек; t2=20сек; t3=52сек; t 4=20сек; t5=13сек
время паузы: t6=100сек.
Определяем эквивалентную мощность F экв :
 |
Выбор двигателя должен удовлетворять неравенствам:
P эф  P н.дв I эф I н.дв M эф M н.дв
P н.дв I эф I н.дв M эф M н.дв
Произведя вычисления результаты, которых удовлетворяют неравенствам, выбираем двигатель типа П2-18170-0.315
Краткая техническая характеристика генератора П-142-6К
Тип _______________________________________________П-142-6К
Мощность, кВт__________________________________________ 430
Напряжение якоря, В _____________________________________460
Номинальная частота вращения, об/мин_____________________1000
Напряжение возбуждения, В _______________________________220
КПД, % ________________________________________________93,5 
Вычислим ток якоря генератора:

Выбранный нами генератор удовлетворяет неравенствам:
U ном.г  U ном.д , т.е. 460 (В)
U ном.д , т.е. 460 (В)  440 (В)
440 (В)
I я.ном.г ³ I я.ном.д , т.е. 1000 (А) ³ 920 (А)
Выбор гонного двигателя.
Основной критерий выбора гонного двигателя - это равенство скоростей вращения якоря генератора и ротора гонного двигателя
Кроме того нужно учитывать:
где
Uгон.д- напряжение гонного двигателя, В;
P гон.д – мощность гонного двигателя, кВт.
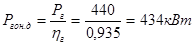
По параметрам подходит асинхронный двигатель АД-4
Краткая техническая характеристика двигателя АД-4.
Тип _____________________________________________________АД-4
Мощность, кВт _____________________________________________440
Скорость ротора, об/мин ____________________________________1000
Скольжение, % _____________________________________________1,5
КПД,% ___________________________________________________94,4
cos¦ , % ___________________________________________________0,86
Заключение.
Выполняя данную работу, мы не только закрепили пройденный теоретический материал, но и обрели некоторые практические навыки при проектировании данной системы электропривода и расчета ее параметров, что является важнейшим фактором нашей программы обучения. Также, используя необходимую справочною литературу, мы получили действительные представления о современных систем электроприводов и о большом количестве электрооборудования, используемом в настоящее время в электроприводе на различных предприятиях, в том числе, и горных.
II. Список литературы.
1. Комплектные тиристорные электроприводы: Справочник/Под ред. В.М. Перельмутера, 1988;
2. Автоматическое регулирование. : Н.Н. Иващенко, 1978г;
3. Теория электропривода: В.И. Ключев, 1985;
4. Примеры расчетов автоматизированного электропривода/Под ред. А.В. Бошарина, 1972г.
5. Исследование характеристик электропривода по системе Г-Д с тиристорным возбуждением; методическое пособие/Под редакцией Б.В. Васильева 1986г.
t
Введение.
Современные автоматизированные электроприводы представляют собой сложные динамические системы, включающие в себя различные линейные и нелинейные элементы (двигатели, генераторы, усилители, полупроводниковых и другие элементы), обеспечивающие в своем взаимодействии разнообразные статические и динамические характеристики.
Электропривод по системе Г-Д с тиристорным возбуждением генератора находит широкое применение во многих отраслях промышленности. Достаточно сказать, что большинство мощных электроприводов постоянного тока различного назначения выполнены по системе Г-Д. Это объясняется рядом ее важных преимуществ по сравнению с другими приводами;
-высокая жесткость механических характеристик;
-ббольшой диапазон и плавность регулирования скорости;
-отсутствие пусковых сопротивлений и потерь энергии в них;
-простота реверса двигателя без переключений в цепи якоря;
-ппростота перевода привода в режимы торможения с рекуперацией энергии в сеть;
-относительная простота схемного решения системы управления приводом, не требующая высокой квалификации обслуживающего персонала. Наряду с перечисленными достоинствами система Г-Д не лишена существенных недостатков, к числу которых относятся:
- недостаточное быстродействие привода;
- неустойчивая работа двигателя в зоне низких скоростей, ограничивающая диапазон регулирования;
- низкий коэффициент полезного действия, не превышающий 75-80%;
- высокая установленная мощность, равная трехкратной мощности регулируемого двигателя; - большая занимаемая площадь.
Расчет и выбор силового электрооборудования привода. Выбор двигателя.
Исходные данные:
F1=13т; F2=16.25т; F3=10.5т; F4=3,3т; F55.3т
t1=13сек; t2=20сек; t3=52сек; t 4=20сек; t5=13сек
время паузы: t6=100сек.
Определяем эквивалентную мощность F экв :
| |
Выбор двигателя должен удовлетворять неравенствам:
P эф P н.дв I эф I н.дв M эф M н.дв
Произведя вычисления результаты, которых удовлетворяют неравенствам, выбираем двигатель типа П2-18170-0.315
Дата: 2019-07-24, просмотров: 295.