Основные способы передачи битовой последовательности
Существуют два основных способа передачи битовой последовательности по физическому каналу:
- посылка бит в линию в непосредственном или закодированном виде при сохранении цифрового характера данных (цифровое кодирование);
- модуляция несущей по амплитуде/частоте/фазе и передача модулированного сигнала.
Цифровое кодирование является наиболее простым. При цифровом кодировании применяют потенциальные и импульсные коды. В потенциальных кодах для представления единиц и нулей используется только значение потенциала сигнала; импульсные коды позволяют представить двоичные данные либо импульсами определенной полярности, либо частью импульса - перепадом потенциала определенного направления.
При использовании для передачи дискретной информации прямоугольных импульсов необходимо выбрать такой способ кодирования, который
- имел бы наименьшую ширину спектра кодированного сигнала при одной и той же скорости передачи;
- обеспечивал синхронизацию между передатчиком и приемником;
- обладал способностью распознавать ошибки;
- обладал низкой стоимостью реализации.
При непосредственном кодировании, например, уровень напряжения 0 В представляет логический «0», а +10 В - логическую «1». Широко используется полярное кодирование - сигналы, соответствующие «0» и «1» имеют противоположные знаки по отношению к общей базе (рис.20.1,а). Такой метод без возвращения к нулю (Non-Return to Zero - NRZ) прост в реализации, но не обладает достаточной помехоустойчивостью и свойством самосинхронизации. Кроме того, недостатком этого кода является наличие низкочастотной составляющей.
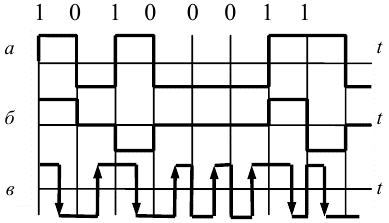
Рисунок 20.1
Метод биполярного кодирования с альтернативной инверсией (рис. 20.1, б) для кодирования «0» использует нулевой уровень, а для кодирования «1» используется либо «+», либо «-», причем потенциал каждой следующей единицы противоположен предыдущему. В последовательности «1» недостатки метода NRZ устраняются, при передаче «0» - нет.
При прямом манчестерском кодировании бит «0» представляется переходом от уровня низкого напряжения к уровню высокому; бит «1» - в обратном направлении (рис. 20.1, в). Этот метод обладает свойством самосинхронизации: в каждом такте на середине периода имеется переход от одного уровня к другому; эти импульсы можно использовать для синхронизации.
Поскольку физическая среда передачи данных на большие расстояния представляет собой длинную линию, состоящую из последовательно соединенных сопротивлений и индуктивностей с параллельным соединением конденсаторов, передача по ней прямоугольных импульсов приводит к их искажениям. Лучше превратить эти импульсные сигналы в модулированный синусоидальный сигнал.
Аналоговая модуляция является таким способом физического кодирования, при котором информация кодируется изменением амплитуды, частоты или фазы несущей частоты. При амплитудной модуляции спектр сигнала состоит из синусоиды несущей частоты fc и двух боковых гармоник: (fc+fm) и (fc-fm), где fm - частота измерения информационного параметра сигнала. Этот способ редко используется в чистом виде, но часто применяется в сочетании с другим видом модуляции - фазовой модуляцией.
При частотной модуляции каждый уровень напряжения модулирующего напряжения соответствует определенной частоте. Этот способ модуляции не требует сложных схем и обычно применяется в низкоскоростных сетях на скоростях 300 или 1200 бит/с. При фазовой модуляции значениям данных 0 и 1 соответствуют сигналы одинаковой частоты, но с различной фазой.
Изменение параметра частоты можно связать с последовательностью бит. Так, при фазовой модуляции можно дать непосредственное соответствие: «0» - фазовый сдвиг 0°, «1» - 180°; можно сделать иначе: 00, 01, 10, 11 закодировать соответственно фазовыми сдвигами 0°, 90°, 180° и 270°.
Число изменений параметра несущей частоты в секунду называется скоростью передачи и измеряется в бодах. Бод совпадает с битом только тогда, когда это изменение соответствует одному биту. Как видно из приведенного примера, это не всегда так.
Когда несущая частота модулируется импульсным сигналом, модуляция называется манипуляцией.
Импульсные методы передачи можно использовать для непосредственной связи между устройствами на расстоянии до трех километров.
Наиболее простым способом разделения физического канала между несколькими устройствами является мультиплексирование - разделение каналов во времени или по частоте. При временном мультиплексировании каждое устройство имеет доступ к каналу только в закрепленные за ним временные интервалы. При частотном мультиплексировании полоса пропускания канала делится на диапазоны частот, каждый из которых закрепляется за одним виртуальным каналом. Осуществляется модуляция несущей частоты, которая находится в середине выделенного диапазона. Временное мультиплексирование имеет два преимущества перед частотным мультиплексированием:
1) вся обработка проводится на цифровом уровне, и нет необходимости в установке и обслуживании высокочастотного оборудования для модуляции и демодуляции сигналов несущей частоты;
2) допускается управление распределением временных интервалов между отдельными устройствами; если устройство не передает данные, его свободные интервалы можно передать другому устройству.
Если передача данных по каналу осуществляется всегда в одном направлении, то режим передачи называется симплексным; если в каждый момент времени каналом пользуется одно устройство, то передача называется полудуплексной; при полном дуплексном режиме передача происходит одновременно в обоих направлениях. Такой режим может осуществляться только с помощью частотного мультиплексирования, при котором каждая сторона имеет свой выделенный частотный диапазон.
Для выявления ошибок при передаче данных были разработаны различные методы контроля. Основной подход - добавить к исходному сообщению дополнительную информацию, позволяющую приемнику установить наличие ошибок при передаче. Информация, добавляемая к сообщению для контроля ошибок, состоит из одного или нескольких байт, вычисленных по содержимому исходного сообщения с помощью определенного алгоритма. Она называется контрольной суммой. Самый распространенный способ определения контрольной суммы - разбить данные на блоки известной длины (от нескольких байт до нескольких тысяч байт) и разделить каждый блок на двоичное число длиной один или два байта. Контрольной суммой является остаток от деления. Двоичное число, используемое при делении, называется порождающим полиномом. В нем указываются только степени, отличные от нуля. Например, стандартный порождающий полином в соответствии с рекомендацией МККТТ V.41 имеет вид
х16 + х12 + х5 + 1,
что соответствует двоичной последовательности 1000100000010001. Если данные не повреждены, то операция деления данных вместе с контрольной суммой на порождающий полином должна дать в остатке нуль. Другой результат указывает на повреждение данных в блоке и необходимость его повторной передачи.
Контрольные вопросы:
1 Опишите основные способы передачи битовой последовательности по физическому каналу.
2 Способ кодирования для передачи дискретной информации прямоугольных импульсов.
3 Суть метода биполярного кодирования с альтернативной инверсией.
4 Суть метода прямого манчестерского кодирования.
5 Способы разделения физического канала между несколькими устройствами.
6 Преимущества временного мультиплексирования перед частотным мультиплексированием?
7 Методы контроля для выявления ошибок при передаче данных.
Лекция 21 Архитектура связи между устройствами. Шинная архитектура доступа к периферийным устройствам. Архитектура доступа с процессорами ввода/вывода. Сбор данных от датчиков
Архитектура связи между устройствами
Связь между отдельными устройствами в составе системы управления может быть организована либо по шинной, либо по канальной архитектуре.
Шинная архитектура доступа к периферийным устройствам
Шина - это совокупность линий - проводников, имеющих определенное функциональное назначение. Требования к шинам определяются их функциональным назначением. В соответствии с ним все шины можно разделить на следующие категории: 1) процессорная шина, связывающая процессор с основной памятью; 2) шина ввода/вывода, специально предназначенная для связи процессора или ОП с ПУ; 3) системная шина, которой могут подключаться все устройства.
Использование системной шины - это простейшая схема подключения ПУ к ядру ЭВМ (процессору и основной памяти). Системная шина состоит из трех наборов линий: для передачи адресов, данных и управляющих сигналов. Кроме линий, в архитектуру шины входит контроллер шины. Его назначение - управление обменом данными и служебными сигналами. Для связи с шиной каждое устройство имеет собственный блок управления (контроллер). Шина, таким образом, представляет собой общий интерфейс, а контроллеры служат для его согласования со спецификой функционирования отдельных устройств.
Все устройства передают и (или) принимают адресную, числовую и управляющую информацию посредством одинакового набора сигналов. Набор сигналов и правил, на основании которых объединяются устройства, соединенные шиной, называют протоколом шины.
Обмен данными между двумя устройствами, подключенными к общей шине, производится по принципу ведущий - ведомый (задатчик - исполнитель). Ведущее устройство активно, оно инициирует обмен; ведомое - пассивно, оно ждет запросов. Чаще всего в качестве ведущего устройства выступает процессор или контроллер ПДП.
Операцию передачи данных по шине называют транзакцией. Промежуток времени, в течение которого выполняется одна транзакция, называется циклом шины.
Для связи с шиной устройство имеет блок управления - контроллер: задатчик - передатчик шины, а исполнитель - приемник шины. Для устройств, которые могут быть и задающими, и исполнительными, требуется приемопередатчик шины.
При разработке шины важнейшими вопросами являются: выбор ширины шины, ее синхронизация и арбитраж. Под шириной шины принято понимать количество линий в ней, т.е. количество одновременно передаваемых бит данных.
Поскольку шина соединяет для совместной работы два устройства, работающих независимо друг от друга, требуется решать задачу синхронизации обмена между ними. Можно реализовать синхронный или асинхронный режим обмена. Шина, предназначенная для работы в синхронном режиме (синхронная шина) содержит линию, по которой идут тактирующие сигналы, формируемые кварцевым генератором. Все транзакции жестко «привязаны» к этим сигналам. Шина, работающая в асинхронном режиме (асинхронная шина) не имеет такой синхронизирующей линии, поэтому начало и конец транзакции не имеют жесткой «привязки» к определенным моментам времени.
В конфликтной ситуации, когда одновременно два или более активных устройств пытаются принять управление шиной на себя, в действие вступает арбитр. Арбитраж - принятие решения о том, какому из них передать функции временного «хозяина» шины - реализуется схемами анализа приоритетов. Процессору присваивается, как правило, самый низкий уровень приоритета, потому что его работу можно без ущерба прервать, какие бы операции он не выполнял. Другие же устройства могут иметь движущиеся механические части или быть связаны с процессом, протекающим в реальном времени, что в любом случае требует немедленной реакции на запрос.
Особенность унифицированной шины - способ адресации внешнего устройства: используется одинаковый формат команд как для ввода/вывода, так и для команд обращения к памяти. Как правило, для простого периферийного устройства используется всего два адреса: один для регистра данных и второй для регистра управляющего слова.
К достоинствам структуры с общей шиной относят простоту организации многопроцессорных вычислительных систем и относительную легкость модернизации и наращивания состава периферийных устройств. Главный недостаток - невозможность обеспечить параллелизм в работе процессора и внешних устройств.
В одной ЭВМ может использоваться несколько различных шин. Это дает возможность лучше учитывать особенности работы устройств разных типов. Например, очевидно, что организация обмена с клавиатурой и с монитором предъявляет различные требования к скорости, к объему передаваемой информации, к управляющим сигналам и т. д.
ISA (Industry Standard Architecture). Этот промышленный стандарт системной шины. В этом стандарте все устройства: процессор, память и устройства ввода/вывода объединены одной магистралью. Для синхронизации процессора, ОП и сравнительно медленно действующих устройств, таких как внешние запоминающие устройства или устройства ввода/вывода, имеется оборудование, которое обеспечивает добавление определенного количества циклов ожидания. Так, при обращении к основной памяти может быть добавлен 1 цикл шины, при обращении к портам ввода/вывода - 4 цикла, при обращении в цикле прямого доступа к памяти (ПДП) - 1 цикл и т.п.
Разрядность шины ISA 8/16- 8 или 16 бит для данных и 16 или 24 - для адреса; тактовая частота 4,77 или 8,33 МГц; пропускная способность составляет 8,33 и 16,7 Мбайт/с. Шина поддерживает синхронный протокол обмена.
Шина ISA была расширена до 32 разрядов данных; разрядность адреса также составила 32 разряда. Такая шина получила название EISA (Extended Industry Standard Architecture - расширенная архитектура промышленного стандарта). Максимальная пропускная способность этой шины при пересылке одиночных слов и тактовой частоте 33 МГц составляет 33,3 Мбайт/с, при групповой пересылке слов ее пропускная способность возрастает до 132 Мбайт/с.
PCI (Peripheral Component Interconnect). Это шина ввода/ вывода. Шина PCI поддерживает все функции, типичные для процессорной шины, но в стандартизированном формате, и поэтому является процессорно-независимой. Разрядность адреса и данных 32 или 64. При длине слова 64 бита, тактовой частоте 66 МГц и групповой пересылке шина обеспечивает пропускную способность 528 Мбайт/с.
Характерная особенность этой шины в том, что ее можно связывать с другими шинами посредством «мостов». Подключенные к этой шине ПУ представляются процессору непосредственно соединенными с его собственной шиной. Специальный контроллер заботится о разделении управляющих сигналов локальной шины процессора и PCI-шины. Периферийным устройствам назначаются адреса из адресного пространства памяти процессора.
Шина PCI управляется централизованным арбитром.
Все обмены по шине буферизованы. PCI легко совместима с большинством известных шин: для этого разработаны и реализованы в виде микросхем «мосты» - PCI/ISA, PCI/EISA и др.
SCSI (Small Computers System Interconnect). Шина SCSI также является шиной ввода/вывода. Она стандартизована (стандарт ANSI X3-0131) в различных модификациях. «Узкая» шина имеет разрядность данных 8 бит и работает на частотах 5 или 10 МГц; «широкая» шина - 16-разрядная. Адаптер SCSI содержит управляющий процессор, способный управлять ПУ разных типов (дисками, принтерами, магнитными лентами, оптическими дисководами с перезаписью и др.). Максимальная скорость передачи по конкретной шине зависит от длины соединительного кабеля и количества подключенных устройств. При максимальной длине соединительного кабеля (25 м) и семи подключенных устройствах «узкая» шина обеспечивает пропускную способность 1,5 Мбайт/с при асинхронной передаче и 5 Мбайт/с - при синхронной. При длине кабеля не более 1,6 м пропускная способность шины «широкого» стандарта SCSI-3 составляет 320 Мбайт/с.
Для шины SCSI применяется схема распределенного арбитража.
Типы внешних устройств, подключаемых к процессору, многообразны. Различны скорости, объемы и временные характеристики обмена. В широком диапазоне варьируются расстояния между устройствами. В середине 1990-х годов была сделана попытка разработать стандарт обмена, обеспечивающий гибкость и универсальность применения при низкой стоимости. Так появилась шина USB (Universal Serial Bus).
Это универсальная шина с последовательной передачей данных, однако ее архитектура не похожа на стандартную шинную, а приближается к канальной. Для того чтобы к шине USB можно было подключать большое количество устройств, она имеет древовидную структуру.
В узлах дерева располагаются устройства, называемые концентраторами, или хабами (от англ. hub - концентратор), действующими как промежуточные управляющие блоки между ядром ЭВМ и периферийными устройствами. Корневой хаб соединяет все дерево с ядром. Каждый хаб имеет несколько выходов, к которым можно подключать ПУ и другие хабы. В нормальном режиме хаб копирует полученное из ядра ЭВМ входное сообщение в свои выходные регистры и оно передается всем устройствам, но отвечает на него только адресуемое. В этом отношении шина USB функционирует подобно общей шине. Однако в отличие от этой шины сообщение от ПУ пересылается только вверх, в направлении корневого узла, и другие устройства его не получают.
Шина USB представляет собой ряд каналов от центрального хаба к ПУ. Каждое устройство может иметь несколько адресуемых регистров для хранения служебной информации (например, вектора состояния). Для обращения к каждому такому адресуемому элементу используется отдельный подканал в общем канале, ведущем к этому устройству. Максимальное число подканалов - 16. В каждом канале или подканале данные перемещаются от центрального концентратора к устройству и обратно. Между двумя устройствами ввода/вывода обмена информацией не происходит. В основе функционирования шины USB лежит принцип опроса устройств: они могут передавать сообщения только в ответ на запрос процессора.
Каждому устройству на шине USB присваивается адрес. Он никак не соотносится с адресами, используемыми на шине процессора.
Передача данных по шине USB идет кадрами, каждый из которых состоит из пакетов. Центральный концентратор шины каждую миллисекунду передает кадр, синхронизирующий все устройства во времени. В этом в кадре всего один пакет SOF (Start Of Frame - начало кадра) и он посылается всем устройствам. Только этот кадр передается от концентратора к устройству. Следующие пакеты кадра могут передаваться в любом направлении.
Шина USB поддерживает три режима функционирования: низкоскоростной (1,5 Мбит/с), полноскоростной (12 Мбит/с) и высокоскоростной (480 Мбит/с). У разработчика вычислительной системы есть выбор, как организовать структуру обмена. Можно к одному хабу подключить несколько низкоскоростных устройств, а к другому - высокоскоростные. Стандарт допускает также присоединение к одному хабу низкоскоростных и высокоскоростных устройств с разделением времени их обслуживания подобно тому, как это делается в мультиплексных каналах.
Основная функция канала - связать периферийное устройство с основной памятью. Поэтому организация работы канала зависит от соотношения скоростей работы периферийного устройства и ОП.
Известны два режима работы каналов: монопольный и мультиплексный, или режим разделения времени. В соответствии с этими режимами работы различают каналы мультиплексные и селекторные.
Мультиплексный канал ввода/вывода предназначен для работы с медленными устройствами в режиме отдельных сеансов связи с каждым из них. За один сеанс передается набор управляющих сигналов, символ или группа символов. Если одновременно запрашивают обслуживания несколько ПУ, то канал выбирает одно из них в соответствии с принятой системой приоритетов. Остальные ПУ, готовые к обмену, ждут своей очереди. Способность ожидания обслуживания без потери информации - обязательное условие подключения устройства мультиплексному каналу.
Операции в селекторном канале выполняются исключительно в монопольном режиме, при котором он в течение достаточно большого промежутка времени используется для обслуживания только одного ПУ. Селекторный канал можно рассматривать как канал, содержащий только один подканал.
Процедуры работы селекторного канала во многом похожи на процедуры мультиплексного канала, однако, принимая во внимание высокую скорость обмена, которую должен обеспечить селекторный канал, в его аппаратуру вводят некоторые особенности.
Во-первых, для хранения и модификации текущих параметров операции в селекторном канале используются регистры, а не память, как в мультиплексном канале. Во-вторых, в селекторных каналах применяют предварительную выборку управляющего слова. В-третьих, введением буферных регистров обеспечивается возможность совмещения во времени обмена с ПУ и обмена с ОП.
При проектировании АСУ важно определить структуру обмена, т.е. решить, какую - шинную или канальную архитектуру - следует выбрать, после чего выбрать наиболее подходящий стандарт обмена.
Сбор данных от датчиков
В системах, где периферия представлена автоматическими датчиками и исполнительными устройствами, не всегда целесообразно использовать сложные сетевые структуры. Существует три более простых способа сбора данных от датчиков и передачи их к более высоким уровням иерархии.
Телеметрия. Это способ передачи данных, когда они передаются непрерывно в заранее определенном формате. После завершения одного цикла передачи начинается новый. Каждый параметр определяется его положением в потоке данных.
Опрос. Управляющий компьютер циклически опрашивает текущее состояние датчиков и периодически обновляет данные в своей внутренней базе данных.
Прерывание. Этот метод заключается в передаче только тех переменных, которые изменились по сравнению с предыдущим циклом. Прерывания инициируются датчиками, когда они должны передавать информацию.
На локальном уровне управления используются как линии связи «точка-точка», так и полевые шины. Рассмотрим сначала линии связи, соединяющие между собой два устройства.
Интерфейс с токовой петлей (Current Loop) относится к классу универсальных двухточечных радиальных интерфейсов удаленного последовательного доступа к контроллерам. Он широко применяется в промышленном оборудовании, так как позволяет осуществить связь по физическим линиям на дальние расстояния (до трех км) без использования аппаратуры передачи данных (модемов).
Интерфейс CL представляет собой двухпроводную линию, образующую токовую петлю с дискретно подключаемым источником тока и приемником (рис. 21.1).
Последовательные данные от источника к приемнику передаются побитно и побайтно асинхронным способом. Международный стандарт IEC 381 рекомендует для передачи сигналов диапазон токов 4...20 мА. Ток, превышающий 17 мА, представляет логическую единицу, а ток, меньший, чем 2 мА - логический нуль. Одно из взаимодействующих устройств должно быть активным и служить источником тока, а другое - пассивным (приемником).
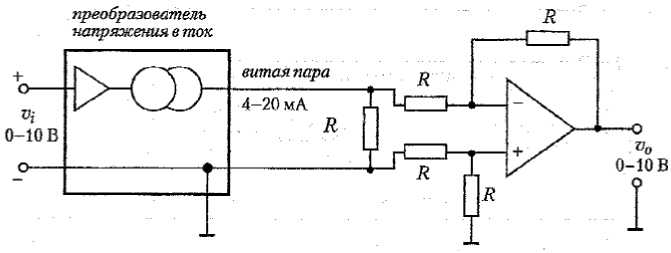
Рисунок 21.1
Интерфейс CL имеет протяженную линию передачи, которая подвержена влиянию внешних помех и перенапряжений. Поэтому схемы передатчика и приемника должны быть гальванически развязаны за счет использования оптронов и изолированных источников питания. Максимальная скорость передачи по токовой петле - 966 бит/с при длине линии связи до 300 м.
Токовая петля позволяет передавать данные по двухпроводной линии в одном направлении (симплексная связь): от передатчика к приемнику. Для дуплексной связи (одновременной передачи в двух противоположных направлениях) используется четырехпроводная линия. Интерфейс содержит цепь 1 «Передаваемые данные» и цепь 2 «Принимаемые данные». Этот интерфейс гарантирует передачу сигналов со скоростью 966 бит/с на расстояние до 500 м (на больших расстояниях пропорционально снижается скорость), но не регламентирует типы применяемых кабелей и разъемов.
Другой тип наиболее широко используемого интерфейса - интерфейс стандарта Ассоциации электронной промышленности США (EIA) EIA-232D (ранее RS - Recommended Standard). Этот тип интерфейса применим как для синхронной, так и для асинхронной связи между двумя устройствами в симплексной, полудуплексном и дуплексном режимах. Стандарт регламентирует состав, назначение и обозначение линий интерфейса, их нумерацию, электрические характеристики и уровни сигналов, скорости передачи и тип разъемов.
В зависимости от условий конкретного применения используется конкретное число линий интерфейса. Так, для асинхронного обмена по физическим линиям нужно три цепи: данные передатчика TD, данные приемника RD и сигнальная земля GND.
Скорость передачи данных по интерфейсу RS-232D составляет от 50 до 19200 бит/с, а максимальная длина линий связи при максимальной скорости не превышает 16 м.
Были разработаны новые стандарты, позволившие улучшить согласование линий, увеличить расстояние и скорость передачи данных, реализовать более сложную структуру соединения приборов. Стандарт EIA-422C ориентирован на использование дифференциальной сбалансированной линии передачи с импедансом 50 Ом, что повышает помехоустойчивость интерфейса и скорость передачи (10 Мбит/с при длине кабеля до 13 м и 100 Кбит/с - при длине 1300 м). Кроме того, этот стандарт допускает нагрузку до 10 приемников. Более поздний стандарт RS-485A, являющийся усовершенствованием EIA-422C, ориентирован при тех же скоростных характеристиках на нагрузку до 32 источников и 32 приемников данных.
Контрольные вопросы:
1 Организация связи между отдельными устройствами в составе системы управления.
2 Охарактеризуйте шинную архитектуру доступа к периферийным устройствам.
3 Дайте определение протокола шины.
4 Принцип обмена данными между двумя устройствами, подключенными к общей шине.
5 Достоинства и недостаток структуры с общей шиной.
6 Охарактеризуйте промышленный стандарт системной шины ISA.
7 Охарактеризуйте шину ввода/ вывода PCI.
8 Охарактеризуйте шину ввода/ вывода SCSI.
9 Охарактеризуйте шину ввода/ вывода USB.
10 Основные режимы работы каналов ввода/ вывода.
11 Способы сбора данных от датчиков и передачи их к более высоким уровням иерархии.
12 Интерфейс с токовой петлей (Current Loop).
13 Интерфейс CL
14 Интерфейс стандарта EIA-232D (RS - Recommended Standard).
Лекция 22 Полевые шины. Локальные сети. Сетевые топологии. Метод доступа Ethernet. Маркерная шина. Маркерное кольцо. Локальная контроллерная сеть CAN
Полевые шины
При наличии множества устройств ввода/вывода требуется такая организация ввода/вывода, которая позволяла бы при наличии минимума соединений обеспечивать прием или выдачу информации множеству однотипных источников. Такая задача решается с помощью локальных шин. Локальные шины, объединяющие «полевую» аппаратуру, называют «полевыми шинами».
Для уровня датчиков необходимо выполнение следующих требований: шина должна передавать данные в соответствии с жестким временным регламентом; объем данных должен быть минимальным, чтобы обеспечить работоспособность в критические по нагрузкам моменты. Шина на уровне датчиков должна обеспечивать интерфейс не только для простых, «неинтеллектуальных» пассивных устройств, но и для сложных устройств и контроллеров.
Единый стандарт шины, обеспечивающей взаимодействие контроллеров, устройств связи с объектом, датчиков и исполнительных механизмов, подключенных к одной шине . Шина такого назначения получила название «полевой шины» (fieldbus). Подобный стандарт должен устанавливать требования к открытому цифровому протоколу обмена, который обеспечивал бы возможность совместной работы средств автоматизации различных производителей.
Такая шина является цифровой, двунаправленной, многоточечной последовательной коммуникационной шиной, используемой для связи таких field-устройств, как контроллеры, датчики, силовые приводы и т.п. Каждое field-устройство обладает самостоятельным вычислительным ресурсом; оно способно самостоятельно выполнять ряд функций по самодиагностике, контролю и обслуживанию двунаправленной связи. Доступ к нему возможен не только со стороны инженерной станции, но и со стороны аналогичных ему устройств. Поэтому технология fieldbus - это нечто большее, чем просто замена интерфейса с токовой петлей.
Fieldbus должна отвечать ряду требований:
- жесткая детерминированность (предсказуемость) поведения;
- обеспечение функций реального времени;
- работа на длинных линиях с использованием недорогих физических средств (например, витая пара);
- повышенная надежность физического и канального уровней передачи данных для работы в промышленной среде (например, при больших электромагнитных помехах);
Fieldbus устраняет эту необходимость отдельных проводов, так как использует всего одну витую пару проводников для объединения всех активных (контроллеры) и пассивных (датчики) устройств.
В настоящее время существует несколько десятков стандартов промышленных шин Fieldbus и коммуникационных протоколов (Bitbus, Profibus, Interbus-S, CAN, Modbus, Lon Works, Fieldbus Foundation и т.д.) и от правильности выбора шины в каждом конкретном случае зависит, насколько успешно будет решена поставленная задача.
Шина Bitbus разработана для построения распределенных систем, в которых должны обеспечиваться высокая скорость передачи, детерминированность и надежность доставки данных. Структура шины всегда включает один ведущий (MASTER) узел и до 249 ведомых (Slave) узлов. Физический уровень основан на RS 485, но возможна работа и по оптическому кабелю. Классическая реализация протокола выполнена на микроконтроллере i8044 (Intel), поддерживающем функции удаленного доступа и имеющего небольшое ядро ОС РВ.
К одной шине можно подключить до 28 устройств, а несколько шин объединить с помощью повторителей. Возможные скорости передачи - 62,5 Кбит/с; 375 Кбит/с и 2,4 Мбит/с. При наименьшей скорости допустимое расстояние между повторителями составляет 1200 м.
Шина Bitbus иерархически структурирована: одно из присоединенных устройств является ведущим, остальные - ведомыми. Ведущее устройство всегда управляет процессом передачи сообщений с помощью механизма опроса: ведущий посылает запрос ведомому, который должен ответить; ведомое устройство не может передать запрос по своей инициативе, а должно ждать запроса ведущего.
Структура пакетов данных следующая:
| 1 поле | 8 бит Значение 01111110 | Начальный флаг |
| 2 поле | 8 бит | Адрес |
| 3 поле | 8 бит | Управляющее поле |
| 4 поле | Произвольная длина | Данные |
| 5 поле | 16 бит | Контрольная сумма |
| 6 поле | 8 бит Значение 01111110 | Заключительный флаг |
Ограничивающие начальный и заключительный флаги кодируются уникальной последовательностью.
Шина Bitbus наиболее эффективна, когда необходимо придерживаться определенной последовательности операций и обращаться к простым ведомым устройствам. Она менее эффективно поддерживает асинхронные операции с более или менее независимыми, т.е. обладающими интеллектом, устройствами
Физическая среда шины PROFIBUS - это экранированная витая пара в соответствии со спецификацией интерфейса RS-485 с максимальной длиной 1200 м (до 4800 м с использованием повторителей). Скорости передачи данных - 9,6; 19,2; 187 и 500 Кбит/с. Тип передачи - полудуплексный (т.е. требуется переключение с приема на передачу), асинхронный (посылается запрос о готовности к передаче). Предусмотрено применение оптоволоконного кабеля и, соответственно, более высокие скорости.
Шина PROFIBUS может работать как с одним постоянным ведущим устройством, так и с несколькими ведущими. К шине можно подключить до 127 активных и пассивных станций. Сообщение может иметь максимальную длину 256 байт. Шина PROFIBUS позволяет осуществлять настройку различных параметров, которые делятся на параметры шины, одинаковые для всех станций, и параметры устройств, отличающиеся от станции к станции.
В PROFIBUS доступ осуществляется в соответствии с архитектурой MASTER/SLAVE («ведущий/ведомый») с переменным ведущим (гибридный метод).
Взаимодействие между ведущими узлами (активными станциями - MASTER) осуществляется на основе передачи права доступа к среде передачи. Это право передается телеграммой - маркером, который циркулирует между всеми MASTER-узлами по логическому кольцу от узла с меньшим адресом к узлу с большим адресом в рамках определенного времени оборота маркера. Когда активная станция получает маркер, ей на определенное время дается право выполнять на шине функции ведущего устройства (MASTER). При этом MASTER периодически опрашивает все необходимые станции Slave. Получив запрос, станции выполняют какие-либо действия в зависимости от полученных данных и посылают ответ. Получив ответ, MASTER его обрабатывает и переходит к следующей станции.
Обмен сообщениями осуществляется в цикле, который состоит из телеграммы-вызова (передача или/и запрос) активного абонента и соответствующей телеграммы-подтверждения или телеграммы- ответа активного или пассивного абонента.
В PROFIBUS телеграммы могут быть различного вида: с фиксированной длиной информационного поля, с переменной длиной, без поля данных и др. Для примера рассмотрим формат телеграммы-вызова фиксированной длины с полем данных:
- биты синхронизации, минимально 33 бита состояния покоя (холостой ход);
- стартовый байт (стартовый разделитель);
- байт адреса пункта назначения;
- байт адреса источника;
- контрольный байт (контроль кадра);
- поля данных; фиксированная длина 8 байтов;
- проверочный байт (порядок контроля кадра);
- конечный байт (разделитель конца).
Формат телеграммы-ответа отличается отсутствием битов синхронизации. В телеграмме с переменной длиной информационного поля может содержаться до 246 байтов данных.
Важная задача для любого протокола - сохранение целостности передаваемых данных. Для этого используются специальные начальные и конечные разделители, жесткая синхронизация и бит контроля паритета (четности) для каждого байта.
PROFIBUS может работать как в режиме «точка-точка», так и в режиме широкого вещания. С помощью шины PROFIBUS можно соединять в гибридную систему несколько независимых устройств и интеллектуальных датчиков.
Interbus использует процедуру доступа к шине по схеме «ведущий/ведомый» (Master/Slave). При этом Master обеспечивает одновременный интерфейс к высокоуровневой управляющей системе и выполняет функции управления шиной. Топология Interbus - это физическое и логическое кольцо, у которого физический уровень построен на основе стандарта RS-485. Это дифференциальный интерфейс, использующий витую пару для информационных передач. Для реализации кольца кабель использует две витые пары (для дуплексного режима) плюс дополнительный провод для передачи сигнала «логическая земля». Такая структура позволяет организовать сеть, работающую на скорости 500 Кбит/с на расстоянии 400 м между двумя соседними узлами сети. Включенная в каждое сетевое устройство функция повторителя сигнала позволяет расширить систему до 13 км. Общее число устройств сети ограничено - 512 узлов.
Сетевые топологии Локальные сети (ЛВС) обычно строятся на базе кабельных соединений - витая пара, коаксиальный или оптоволоконный кабель. Современная распределенная система управления строится, как правило, на основе открытых промышленных стандартов. Открытые технологии для потребителя означают возможность компоновки информационной системы из модулей различных производителей, что позволяет выбрать наилучший вариант решения собственной задачи.
Наиболее важные сетевые топологии: шина, звезда, кольцо, древовидная (иерархическая) архитектура, смешанная архитектура - одновременное использование нескольких технологий.
Метод доступа Ethernet поддерживает шинную топологию. На физическом уровне Ethernet работает как с узкополосным, так и с широкополосным кабелем. Чаще используется первый: данные передаются в канал методом манчестерского кодирования; модуляция несущей частоты не требуется. Допускается использование оптоволоконного кабеля и витой пары. Техническая скорость передачи варьируется от 10 Мбит/с (для коаксиального кабеля) до 1 Гбит/с (для оптоволокна).
Кадр начинается с 8-байтовой преамбулы 101010..., затем следует адрес получателя и адрес источника, каждый из которых имеет длину 6 байт. Адрес получателя может относиться к одному устройству (индивидуальный адрес), к определенному подмножеству устройств (групповой адрес) или ко всем абонентам (широковещательный адрес). Далее следует 2-байтовое поле, интерпретация которого зависит от реализации (длина поля данных или тип протокола верхнего уровня). Пользовательские данные начинаются после этой предварительной информации. Длина поля данных - от 46 до 1500 байт, к сообщению короче 46 байт добавляются нули. Кадр заканчивается 4-байтовой контрольной суммой.
Маркерная шина В этой сети все абоненты присоединены к сети с помощью шины. Физической средой является коаксиальный кабель или витая пара, поддерживающая скорость передачи данных в диапазоне 1.10 Мбит/с. В сети с маркерной шиной доступ к сети осуществляется строго детерминированным образом, т.е. только одна станция в данный момент может начать передачу сообщения. Право на передачу дается маркером - специальной битовой комбинацией, которая последовательно циркулирует между устройствами. Устройство, получившее маркер, имеет право на передачу в течение определенного интервала и затем должно переслать маркер следующему. Если у устройства нет данных для передачи, оно просто передает маркер дальше. Логически маркер последовательно перемещается по кольцу, хотя фактической топологией является шина. Преимущество маркерной шины заключается в том, что все параметры процесса связи имеют детерминированный характер и время ожидания в наихудшем варианте можно точно определить.
Маркерное кольцо. Отличие этой сети от сети с маркерной шиной заключается в том, что здесь кольцо является не только логическим, но и физическим. Когда станция, имеющая сообщение для передачи, получает маркер, она удаляет его из кольца и в течение максимально разрешенного времени передает свои пакеты данных. Физическая среда передачи - экранированная витая пара со скоростью передачи 4 или 16 Мбит/с. Каждая станция проверяет поле получателя в поступающих сообщениях. Если сообщение не предназначено для данной станции, оно передается дальше. Когда станция в кольце не включена или не готова к работе по другой причине, ее выходные и входные соединители к шине закорачиваются друг с другом через реле, для того чтобы обеспечить беспрепятственную циркуляцию сообщений по шине.
Локальная контроллерная сеть CAN (Controller Area Network) является последовательной сетью, которая эффективно поддерживает распределенное управление в реальном масштабе времени с высоким уровнем защиты данных. Физической средой для сети CAN служит двухпроводная шина с терминаторами на концах. Роль шины выполняет кабель, содержащий одну экранированную витую пару или две (вторая витая пара может использоваться для питания интерфейса CAN- контроллера); плоский кабель; оптоволокно; радио- и ИК-каналы. Основным ограничением протяженности шины является предельно допустимая задержка (при передаче на скорости 1 Мбит/с - 30 м, 10 кбит/с - 5000 м).
В сети CAN не применяется адресация абонентов: сообщение принимается всеми узлами. Каждое сообщение имеет свой идентификатор, стоящий в начале кадра и определяющий его содержание. Сообщение, передаваемое одним узлом, рассылается по сети всем станциям (широковещательная передача), а каждый узел, принявший сообщение, на основании полученного идентификатора решает, будет ли оно обработано или проигнорировано. Возможные коллизии (при одновременном запросе шины несколькими узлами), разрешаются по приоритетности сообщений. Она определяется поразрядным сравнением битов идентификаторов.
Каждое CAN-сообщение содержит 0...8 байт данных. Большие блоки данных передаются благодаря принципу сегментации. Передача сообщений идет отдельными кадрами. Каждый кадр состоит из полей: арбитража, контроля, данных и протокола.
Возможные коллизии, связанные с одновременным запросом шины несколькими узлами, разрешаются по приоритетности сообщений, определяемой поразрядным сравнением битов идентификаторов. Право на работу с шиной получает тот узел, который передает сообщение с наивысшим приоритетом. Все проигравшие узлы автоматически становятся приемниками и не делают попытку передачи, пока шина не освободится. Механизм арбитража реализован на аппаратном уровне.
На аппаратном уровне реализован контроль сообщений (используется пять механизмов проверки передаваемых сообщений). CAN-контроллер регистрирует ошибки и оценивает их статистическими методами для принятия соответствующих мер - вплоть до отключения от сети ошибающегося узла.
CAN-сеть широко используется в промышленности, в энергетике и т.п. ввиду высокой коммуникационной надежности, небольшой стоимости подключения каждого узла к сети, доступности CAN-контроллеров для нескольких производителей.
При выборе коммуникационной технологии следует руководствоваться количественными параметрами: объёмом передаваемых данных, максимальной длиной шины, допустимым числом узлов на шине, помехозащищённостью, стоимостью, а также эффективностью решения задачи, простотой конфигурации и т.д.
Канальный уровень передачи
На канальном уровне решаются задачи формирования кадров, защиты от ошибок и управления доступом к среде передачи. Для этих целей разработаны специальные протоколы.
Протокол высокоуровневого управления каналом передачи данных (High-Level Data Link Control - HDLC) разработан ISO и используется в качестве основы для других протоколов.
Управляющие поля в кадре HDLC имеют фиксированное расположение и длину; переменную длину имеет только поле данных. Ограничивающие начальный и заключительный флаги кодируются уникальной последовательностью 01111110. Для обеспечения уникальности такой последовательности передатчик автоматически вставляет 0 после пяти идущих подряд 1 во все поля, кроме флагов. Приемник удаляет любой 0, следующий непосредственно за пятью идущими подряд 1.
Адресное поле имеет смысл только в том случае, если несколько станций могут принимать одно и то же сообщение - например, в локальных сетях, где все станции разделяют общий физический тракт передачи.
Управляющее поле определяет тип кадра: информационный, супервизорный или ненумерованный. Информационный кадр содержит пользовательские данные; его управляющее поле идентифицирует порядковый номер текущего и следующего кадров. Супервизорный кадр используется для координации действий приемника и передатчика и выполняет управляющие функции - подтверждение кадров (квитирование), запрос на повторную передачу информационного кадра, если нарушена последовательность кадров. Ненумерованные кадры используются для инициализации и разъединения звена и для других целей управления.
Поле данных может иметь любую длину. Поле контрольной суммы вычисляется с помощью многочлена х1б+х12+х5+1.
Структура кадра HDLC соответствует семиуровневой структуре ВОС: начальный и заключительный флаги необходимы на физическом и канальном уровнях; адресное и управляющее поля и поле контрольной суммы относятся к 2-му и 3-му уровням; передаваемые данные - к 7-му.
Протокол телеметрии IEC-870 - широко распространенный стандарт для мониторинга и управления распределенными процессами. В протоколе телеметрии IEC-870 единицей передачи информации является телеграмма, состоящая из байтовых последовательностей по 8 бит. Каждый байт передается в виде 11-битовой последовательности (1 стартовый бит, 8 бит данных, 1 бит четности, 1 бит стоповый). Кадры передаются последовательно в каждой телеграмме в следующем порядке:
- заголовок (1 или 4 байта);
- пользовательские данные (переменная длина, до 253 байт);
- контрольная сумма (1 байт);
- символ конца сообщения (1 байт).
Заголовок указывает, какой тип телеграммы следует за ним - фиксированной или переменной длины. Телеграмма фиксированной длины имеет длину 6 байт. В телеграмме переменной длины заголовок содержит начальный байт, за которым следует длина телеграммы. В четырех байтах заголовка в качестве меры безопасности повторяются начальный символ и длина сообщения. В пользовательских данных два байта отведено для указания адреса, затем следуют данные.
Контрольные вопросы
1 Расскажите о модели взаимодействия открытых систем.
2 Какие существуют три основные структуры сетевого обмена?
3 Нарисуйте амплитудную, фазовую и частотную манипуляцию.
4 Почему бод не всегда совпадает с битом?
5 Нарисуйте временное и частотное мультиплексирование.
6 Что такое «полевая шина»?
7 Расскажите о работе шины Bitbus.
8 Расскажите о работе шины Profibus.
9 Как работает метод множественного доступа с прослушиванием несущей?
10 Какой принцип доступа осуществляется в маркерной шине?
11 Как работает сеть с маркерным кольцом?
12 Расскажите о работе сети CAN.
13 Как работает шина USB?
Дата: 2019-04-23, просмотров: 435.