Цель работы.
Приобретение практических навыков в технологии разработки и отладки элементов управляющих систем.
Описание лабораторной установки.
Лабораторная установка состоит из следующих частей: платы управления ПМК, платы двигателя и блока питания.
Плата двигателя рис.6.1 состоит из трех блоков: блок датчика скорости вращения, блок управления, блок датчика нагрузки. Плата двигателя подключается к разъемам портов ПМК при помощи разъемов. X2 подключается к порту Р3 и служит для соединения: оптопары («Датчик») со входом прерывания INT1, портов Р3.4 Р3.5 с входами блока управления (Упр1 и Упр2). X6 подключается к порту Р6 используя две линии AI6 и AI7 для измерения нагрузки прелагаемой к двигателю с помощью генератора (измерение нагрузки прелагаемой из вне при помощи этой схемы невозможно). Использование двух каналов предусматривается для измерения напряжения двигателя с возможным реверсом когда при вращении в одну сторону измерение происходит с первого канала, а при вращении в другую со второго. Такое распределение получается путем использования делителя напряжения общий конец которого соединен с нулевым проводом и при протекании тока в разных направлениях меняет знак напряжения на концах делителя относительно общего провода на противоположный. Опорное напряжение Uref подается соединением +5В, а нижняя граница (Ugnd) задается соединением с общим.
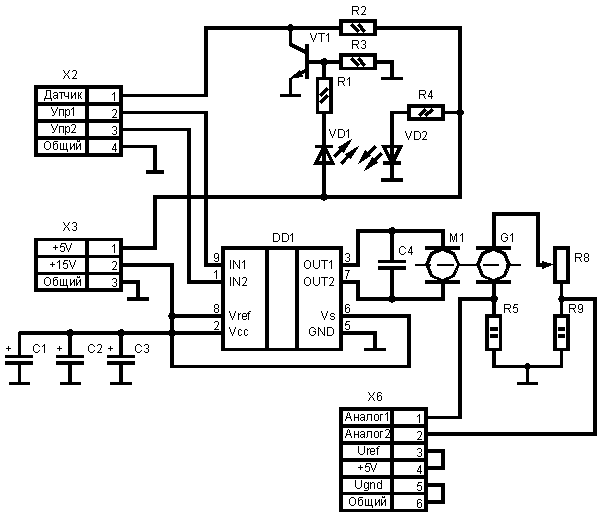
Рис. 6.1.Схема платы двигателя.
Разъем X3 соединяет схему с блоком питания.
Датчик числа оборотов представляет собой диск, с 24-ю прорезями, жестко закрепленный навалу вращения двигателя. Во время прохождения прорези между оптопарой светодиод VD2 освещает инфракрасным излучением фотоприемник представляющий собой фотодиод VD1. Полупроводниковый фотоприемник уменьшив за счет этого свое сопротивление начинает пропускать ток открывая тем самым транзистор VT1 с коллектора которого снимаются прямоугольные импульсы.
Обороты двигателя прямо пропорциональны приложенному к нему напряжению. В связи с этим предлагается удерживать частоту вращения в определенных границах с помощью изменения напряжения подаваемого на двигатель. Использование цифровых систем управления которые позволяют быстро обрабатывать данные делает возможным применения в качестве меняющегося напряжения шим-генератор. Длительность импульсов и пауз формируется динамически в зависимости от характера приложенной нагрузки. Подержание оборотов при увеличении нагрузки будет длится до тех пор пока длительность паузы не будет равной нулю и дальнейшее увеличение нагрузки будет снижать обороты двигателя. Для улучшения поддержания частоты вращения предлагается максимально возможно увеличить напряжение источника питания.
Исходные данные.
1. Комплекс отладочный: плата, ПО FDSAB;
2. Установка управления двигателем;
3. Возможность установки частоты вращения с клавиатуры;
4. Стабилизация частоты;
5. Импульсы с датчика поступают на вход прерывания INT1;
6. Управление двигателем осуществляется выдачей кода на порты Р3.4 и Р3.5 в соответствии с таблицей 6.1;
7. Максимальная скорость вращения двигателя 110 обр1/сек.;
8. Число прорезей диска вращения датчика составляет 24 шт.
9. Мощность двигателя 10 Вт;
10. Входы для измерения нагрузки поступают на АЦП каналы AI6 и AI7. VAREF=5B.
Таблица 6.1
| Режим работы | IN1 | IN2 | OUT1 | OUT2 |
| Тормоз | 1 | 1 | L | L |
| Движ/Рев | 0 | 1 | L | H |
| Рев/Движ | 1 | 0 | H | L |
| Стоп | 0 | 0 | ¥ | ¥ |
6.4. Домашние задание.
Составить алгоритм и программу стабилизации частоты вращения электродвигателя постоянного тока с параллельным возбуждением в соответствии с исходными данными.
Рекомендации по выполнению.
В качестве параметра регулирования взять длительность периодов импульсов от оптопары. Выбор этого параметра взамен измерению частоты вращения диска, перекрепленного на двигатель, позволяет производить быстрый контроль стабильности системы управления за счет значительного уменьшения длительности измерения. Для такого регулирования необходимо преобразовывать введенную частоту вращения в длительность периода импульсов, формируемых прорезями на диске датчика, и обратно – длительность периода в частоту вращения. Рекомендуется осуществлять преобразование следующим образом:
1) Введенную частоту вращения (обр/сек) умножить на число прорезей в диске (24);
2) 1000000 разделить на полученное число, в результате чего получится длительность одного периода в мкс.
Для обратного преобразования:
1) 1000000 разделить на длительность периода;
2) разделить на 24.
При делении 1000000 (3 байта) на 2 байта возможно использование стандартной процедуры деления 4-х байтного числа на 2-й байтное. Но для более быстрого деления (а значит и увеличения скорости измерения) рекомендуется уменьшить длительность деления, производя деление 6-ти тетрад (1000000) на 3-и тетрады (максимально возможное число 4095), для этого необходимо:
1) перед процедурой деления сдвинуть делитель на четыре разряда влево;
2) продолжать деление с учетом сдвинутого делителя, т. е. деление должно длится на четыре цикла меньше;
3) после процедуры деления сдвинуть частное на четыре разряда влево.
Для измерения длительности периода импульсов необходимо в качестве счетчика использовать один из таймеров в режиме таймера. Подача на вход прерывания INT1 импульсов вызывает ПП обработки прерывания в которой необходимо следить за первым и вторым входом в ПП. При первом вхождении включить таймер, а при втором вхождении считать состояние таймера, что и будет являться длительностью периода импульса.
Дата: 2019-05-29, просмотров: 302.