АННОТАЦИЯ
В этой работе разработаны алгоритм и система управления положением кресла водителя, а также синтезирована микроконтроллерная система управления. Она предназначена для увеличения комфортабельности поездки в автомобиле. Рассмотрены и оценены возможные факторы, влияющие на процесс управления объектом.
THE SUMMARY
In this work is designed algorithm and managerial system by position of the easy chair of the driver, as well as synthesized микроконтроллерная managerial system. She is intended for increase comfort trips in car. They are considered and evaluated possible factors, influencing upon process of object management.
РЕФЕРАТ
Выпускная работа содержит 44 страницы машинописного текста, 11 рисунков, 1 таблицу, 3 источника.
Система управления, микроконтроллерная система, пространственно положение, давление
Цель работы – разработка системы управления положением кресла водителя.
В процессе выполнения работы были рассмотрены особенности управления автомобильным креслом. Синтезирован алгоритм управления креслом водителя с учетом различных внешних факторов.
Разработана микроконтроллерная система управления положением кресла водителя.
Рассмотрена экономическая целесообразность проекта.
Рассмотрена безопасность и экологичность данного проекта.
Результатом работы является система управления положением кресла водителя.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. 6
1 Автомобильное кресло, как объект управления.. 8
2 Математическая модель. 12
2.1 Математическая модель двигателя постоянного тока (ДПТ) 14
2.2 Алгоритм функционирования системы.. 18
3 Разработка структурной схемы.. 20
4 Устройство отдельных блоков системы.. 22
4.1 Микроконтроллер. 22
4.2 Канал 1. 26
5 экономическое обоснование проекта.. 30
5.1 Стоимостная оценка разработки. 30
5.2 Стоимостная оценка изделия. 32
6 Безопасность и экологичность проекта.. 33
6.1 Системный анализ безопасности и надежности при эксплуатации. 33
6.2 Меры по устранению отказов. 36
6.3 Защита окружающей природной среды и утлизация устройства. 38
7 Социальная значимость проекта.. 44
Заключение. 45
СПИСОК литературы.. 46
ВЕДЕНИЕ
В последнее время в связи с развитием непроизводственных сфер труда, человек стал много времени проводить сидя. Для того, что бы длительное нахождение в сидячем положении не доставляло больших неудобств, а как следствие не отвлекало от работы, сиденье должно быть удобным. Однако это не просто, так как у каждого человека индивидуальные потребности, связанные с формой тела, полнотой и рядом других факторов. Но производить сиденья для каждого человека индивидуально не представляется возможным.
Существует ряд видов деятельности, где сидеть необходимо. Примером может служить вождение автомобиля. Отличительной особенностью здесь является то, что водитель не может отвлекаться от дороги, что затрудняет его действия, в том числе в целях обеспечения собственного комфорта. Для водителя во время движения является проблемой изменить форму сиденья, так как это затребует некоторых усилий и отвлечения внимания от дороги, что может привести к печальным последствиям. Однако при длительных поездках изменение формы сидения необходимо, так как тело устает, находясь в одном и том же положение без движения. Решением этой проблемы может служить сиденье, оснащенное приводами и системой управления к ним. Такая система будет отбирать минимум внимания и не потребует никаких физических затрат водителя.
Тема дипломного проекта является актуальной, так как целью своей имеет создание комфорта для людей находящихся в автомобиле, что в свою очередь является немаловажным фактором при обеспечении безопасности на дороге.
Целью дипломной работы является разработка системы управления положением кресла водителя.
В работе решаются следующие задачи:
- разработка моделей и алгоритмов управления объектом с учетом особенностей данного объекта;
- разработка структурной и принципиальной схем системы управления.
Результаты работы являются практически полезными, т.к. могут найти применение при разработке реальных систем управления для применения их в автомобильных креслах, или же офисной мебели.
В первом разделе данной работы рассматриваются принципы построения управляемого объекта, его структура, особенности и проблематика управления системой на различных этапах управления.
Во втором разделе определяются входные, возмущающие и выходные переменные, описывается модель управляющего элемента, формулируется алгоритм функционирования системы в целом.
В третьем разделе описывается структурная схема системы в целом и основные принципы ее функционирования.
В четвертом разделе производится детальное описание частей системы.
В пятом разделе приводится экономическое обоснование актуальности разрабатываемого проекта, определяются капитальные и энергетические затраты.
В шестом разделе производится оценка напряженности труда разработчика, анализ условий труда разработчика и мероприятия по устранению вредных факторов, экологичность работы.
Математическая модель
При выполнении данной работы должна быть получена система управления, взаимодействующая с человеком. Эта система должна получать сигналы от пользователя (водителя), которые после обработки идут на исполнительные механизмы. Так же должны анализироваться сигналы, поступающие с датчиков, на систему, которые либо накладывают ограничения на работу системы, либо полностью определяют ее. Так как в проекте решаются две относительно не связанные задачи – изменение пространственного положения кресла и изменение его формы, всю систему можно разбить на две составляющие подсистемы. Управление обоими частями должно осуществляться одним элементом, в качестве которого выступает микроконтроллер. Микроконтроллер также связывает панель управления с системой.
При работе на любую систему поступает ряд воздействий, часть из которых предусмотрена самой системой, как правило, контролируема и называется вектором входных воздействий, а часть является неконтролируемой, оказывая в основном вредные воздействия, с которыми необходимо бороться, такие воздействия называются возмущающими или помехой. Сама система, обработав входные воздействия, с учетом возмущения, формирует на выходе некоторый выходной сигнал.
При рассмотрении данной системы входным воздействием является сигнал, поступающий с панели управления. Этот сигнал представляет собой единичный скачок.
На выходе системы стоит двигатель, который осуществляет изменение пространственного положения сиденья, следовательно, именно с него наблюдается выходное воздействие, оказываемое на сиденье. Данное воздействие представляет собой угол поворота двигателя, который в случае спинки передается непосредственно на сиденье, либо преобразуется в поступательное движение подушки или подголовника.
Возмущающих воздействий в системе, как правило, много. Однако в данной системе можно выделить одно, наиболее значимое воздействие, оказываемое человеком, а именно его массой. Это воздействие представляет собой момент сопротивления создаваемый на валу двигателя, что может привести к замедлению скорости последнего вплоть до полной остановки.
Микроконтроллер
Реализация концепции RISC-архитектуры в 8-разрядных микроконтроллерах существенно расширила среду их применения. К традиционным приложениям таких микроконтроллеров (телекоммуникации, системы сбора данных, системы охраны, автоэлектроника, системы отображения информации и т. д.) сегодня прибавляются такие, где раньше использовались только более мощные 16– и 32–разрядные процессоры с функцией цифровой обработки сигналов, например, обработка видеосигналов или управление электроприводом [16].
Компания ATMEL – один из мировых лидеров в производстве широкого спектра микросхем энергонезависимой памяти, FLASH-микроконтроллеров и микросхем программируемой логики, взяла старт по разработке RISC-микроконтроллеров в середине 90-х годов, используя все свои технические решения, накопленные к этому времени.
AVR-архитектура, объединяет мощный гарвардский RISC-процессор с раздельным доступом к памяти программ и данных, 32 регистра общего назначения, каждый из которых может работать как регистр- аккумулятор, и развитую систему команд фиксированной 16-бит длины. Большинство команд выполняются за один машинный такт с одновременным исполнением текущей и выборкой следующей команды. 32 регистра общего назначения образуют регистровый файл быстрого доступа, где каждый регистр напрямую связан с АЛУ. За один такт из регистрового файла выбираются два операнда, выполняется операция, и результат возвращается в регистровый файл. Все микроконтроллеры AVR имеют встроенную память программ с возможностью внутрисхемного программирования через последовательный интерфейс [17].
Для целей управления микроконтроллеры AVR делает привлекательным их хорошо развитая периферия, которая включает в себя: таймеры–счётчики, широтно-импульсные модуляторы, поддержку внешних прерываний, аналоговые компараторы, встроенный АЦП, параллельные порты ввода и вывода, интерфейсы, сторожевой таймер и устройство сброса по включению питания. Компания ATMEL предлагает бесплатную программную среду AVR-studio для отладки программ в режиме симуляции на программном отладчике, а также для работы непосредственно с внутрисхемным эмулятором.
Все эти качества превращают AVR-микроконтроллеры в мощный инструмент для построения современных, высокопроизводительных и экономичных контроллеров различного назначения.
В рамках единой базовой архитектуры AVR-микроконтроллеры подразделяются на три подсемейства:
- Classic AVR основная линия микроконтроллеров с производительностью отдельных модификаций до 16 MIPS;
- Mega AVR для сложных приложений, требующих большого объема памяти;
- tiny AVR низкостоимостные микроконтроллеры в 8-выводном исполнении [17].
Для выбора конкретного микроконтроллера из всего модельного ряда AVR проанализируем техническое задание и структурную схему. Микроконтроллер должен содержать: таймер; не менее 11 линий ввода-вывода.
Исходя из выше сказанного, и из стремления уменьшиться стоимость изделия, можно заключить, что в данной схеме подходящим для использования является микроконтроллер семейства Classic AVR, AT90S2313. Расположение его выводов изображено на рис. 6:
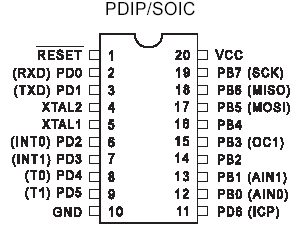
Рис. 6 Расположение выводов микроконтроллера AT90S2313
Перечислим его основные свойства:
- AVR® - высокая производительность и RISC архитектура с низким энергопотреблением
- 118 мощных инструкций - большинство из них выполняются за один такт
- 2 Кбайт Flash- памяти с поддержкой внутрисистемного программирования SPI- последовательный интерфейс для загрузки программного кода Ресурс: 1000 циклов записи/стирания
- 128 байта EEPROM: Ресурс: 100 000 циклов запись/ стирание
- Рабочие регистры общего назначения 32 х 8
- 15 программируемых линий I/O
- - питание VCC: от 2.7 В до 6.0 В;
- Полностью статический режим работы: От 0 до 10 МГц, при питании от 4.0 В до 6.0 В От 0 до 4 МГц, при питании от 2.7 В до 6.0 В
- Производительность, вплоть до 10 MIPS при 10 МГц
- Один 8-ми разрядный таймер/счетчик с отдельным предварительным делителем частоты
- Один 16-ти разрядный таймер/счетчик с отдельным предварительным делителем частоты с режимами сравнения и захвата
- Полнодуплексный UART
- Выбираемые 8, 9, или 10-ти разрядные режимы широтно-импульсной модуляции (ШИМ)
- Внешние и внутренние источники прерывания
- Программируемый следящий таймер с встроенным тактовым генератором
- Встроенный аналоговый компаратор
- Экономичные режимы ожидания и пониженного энергопотребления
- Программируемая блокировка для безопасности программного обеспечения
- 20 выводов
Канал 1
В данной части системы, отвечающей за пространственное положение кресла, главную роль играет микропроцессор. Сам Канал 1 представляет собой набор ключевых элементов. Первый ключ подключает дальнейшую часть схемы к питанию. В качестве такого ключа может использоваться оптореле, схема которого приведена рис. 7:
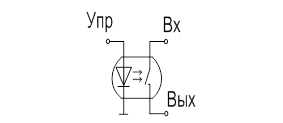
Рис. 7 Оптореле
Здесь Упр – управляющий сигнал с микроконтроллера, Вх – вход, т.е. напряжение питания, Вых – выход, точка подключения к дальнейшей части схемы. Через этот ключ в схему поступает «плюс» питания. «Минус» питания подключен постоянно. Использование оптореле удобно в смысле безопасности микроконтроллера, так как оно обеспечивает гальваническую развязку микроконтроллера со схемой.
После первого ключа в схеме идет инвертор, управляемый микроконтроллером. В качестве инвертора используется реле, у которого через нормально замкнутые контакты двигатели подключены в «прямом» направлении («прямое» направление выбрано условно). Следовательно, если необходимо что бы двигатели двигались в «прямом» направлении необходимо что бы питание реле было отключено, т.е. на линии микроконтроллера отвечающей за этот элемент был «0». Принципиальная схема инвертора изображена на рис.8.
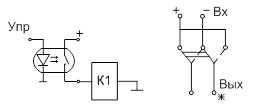
Рис. 8 Принципиальная схема инвертора
Здесь К1 – реле, Вх – вход данной части схемы, где «+» – выход предыдущего звена; Вых и Упр имеют тоже значение что и в предыдущей схеме. Значение символа «*» будет рассмотрено дальше. Как уже говорилось выше, применение инвертора связано с необходимостью менять направление вращения двигателей. Изменять направление движения можно, используя механические схемы. Однако такой способ будет более громоздким и дорогостоящим, а следовательно – нецелесообразным.
Дальше по схеме идут ключевые элементы, отвечающие за подключение нужного двигателя к схеме. Эта часть схемы необходима для подключения конкретного двигателя к питанию. Выбор двигателя осуществляется микроконтроллером, в соответствии с пришедшим сигналом с панели управления. Схема такого набора ключевых элементов приведена на рис. 9.
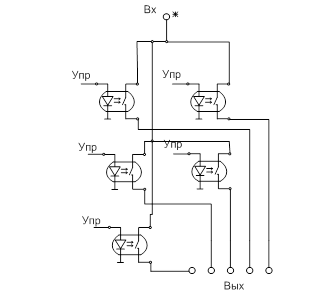
Рис. 9 Схема выходных ключевых элементов
Приведенная схема представляет собой набор оптореле.
В схеме на рис. 8 один из выходных контактов был обозначен символом «*». Именно этот контакт подключается к входу схемы на рис. 9. Такое подключение позволит полностью отключить двигатель от питания в пассивном режиме, что может предостеречь, от различного рода случайностей.
Общая схема Канала 1 приведена на рис. 10.
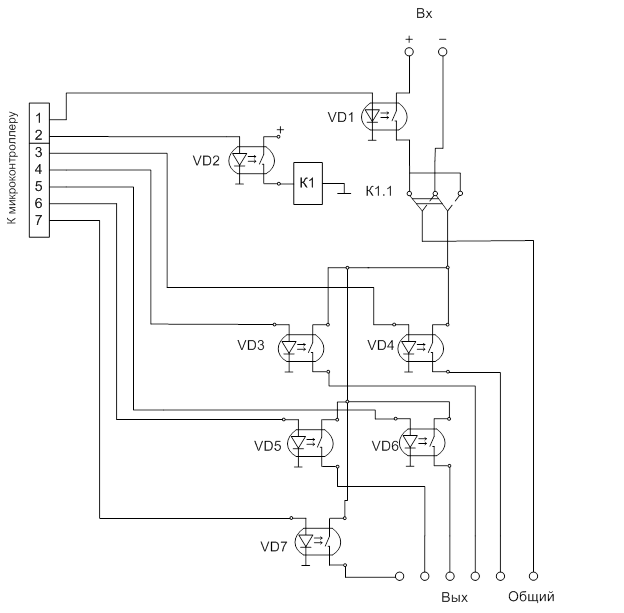 Рис. 10 Принципиальная схема Канала1
Рис. 10 Принципиальная схема Канала1
Стоимостная оценка изделия
Стоимостная оценка разработки может быть осуществлена лишь приблизительно ввиду отсутствия точных данных о цене комплектующих данного изделия.
Таблица 1
Затраты изделие
| Наименование | Количество, шт. | Цена единицы, руб. | Стоимость, руб. |
| Микроконтроллер AT90S2313 | 1 | 95 | 95 |
| Двигатель постоянного тока | ≥5 | 900 | ≥4500 |
| Оптореле | >7 | 30 | >210 |
| Реле | >1 | 10 | >10 |
| Транспортно-заготовительные расходы (10 %) | >480 | ||
| Итого | >5300 | ||
В таблице в отношении большей части составляющих показано, что потребуется больше элементов, чем указанное число. Это связано с тем, что пока отсутствует принципиальная схема Канала 1, а значит, нет точных данных о необходимых элементах и их количестве.
Приведенный перечень, составляющий таблицу, может быть дополнен, если указать такие элементы, как провода, стеклотекстолит, припой, спирт и прочее. Расчет количества подобных составляющих схемы затруднителен, так как практической реализации система не проходила, а теоретической расчет будет слишком приближенным. Однако даже их стоимость мала, и не внесет значительного изменения на цену изделия в целом, поэтому она опущена.
Меры по устранению отказов
Рассмотрим также комплекс мероприятий по повышению надежности проектируемого устройства на этапе изготовления и настройки.
На этапе изготовления необходима строгая выдержка времени травления платы и использование современной измерительной аппаратуры. Необходимо соблюдать правила монтажа полупроводниковых приборов, не допуская их перегрева при пайке и изгиба выводов ближе, чем это предусмотрено в технических условиях.
На этапе настройки необходимо строго соблюдать диапазон питающих напряжений и их полярность. Рекомендуется использовать источники питания с высоким Кст, защитой от короткого замыкания в нагрузке и защитой нагрузки от превышения входного напряжения. Необходимо наличие проверенной измерительной аппаратуры и исправного инструмента.
Свойства объекта выполнять заданные функции, сохраняя во времени значения установленных эксплуатационных показателей в заданных пределах, соответствующих заданным режимам и условиям использования, технического использования, ремонтов, хранения и транспортировки, называется надежностью объекта.
Снизить вероятность отказа системы, можно обеспечив оптимальные климатические условия. Необходимо соблюдение требуемых рабочих температур, влажности, давления.
Для обеспечения мер по повышению надежности при изготовлении системы необходимо соблюдать приведенные ниже правила.
Для предотвращения отказа электрической схемы, связанной с дефектами элементов необходимо перед пайкой проверять каждый элемент на работоспособность и соответствие номиналу, контроль осуществлять на аппаратуре прошедшую метрологическую поверку.
Чтобы избежать отказов электрической схемы связанных с дефектами в процессе сборки необходимо руководствоваться правилами монтажа элементов. При пайке необходимо осуществлять отвод тепла, чтобы не вызвать перегрев элементов, также нужно выбирать паяльник с соответствующим температурным режимом.
Для предотвращения короткого замыкания необходимо изолировать все опасные в этом отношении места системы. Заземлением инструментов и приборов можно избежать электростатического пробоя элементов. Чтобы уменьшить воздействие влаги на устройство, можно выполнить прибор в герметичном корпусе.
Для повышения надежности следует:
- четко следовать рекомендациям по монтажу элементов в данном устройстве;
- для предотвращения вероятности поражения током и, пользоваться низковольтными паяльниками, резиновыми ковриками, работать заземленным инструментом;
- для предотвращения отказов, вызванных дефектами печатной платы необходимо контролировать качество ее изготовления, избегать ее деформации, ударов по ней и т.п.;
- после окончательного монтажа элементов тщательно проверить места паек, проверить омметром на случайное замыкание припоем печатных проводников расположенных близко друг к другу;
- в местах находящимся под напряжением опасным для человека сделать предупредительные надписи;
- обеспечить надежное крепление печатных плат, блоков и модулей внутри конструкции.
Заключение
В ходе выполнения работы была разработана система управления положением кресла водителя.
Были рассмотрены и оценены требования к процессу управления, внешние факторы, функционирования системы при различных ситуациях.
Микроконтроллерная система была реализована на контроллере фирмы ATMEL , AT90S2313.
В ходе разработки проекта была рассмотрена его экономическая целесообразность, а так же рассмотрена проблема обеспечения безопасностью инженера- проектировщика.
Работа может быть продолжена, и дополнена рядом возможностей. К примеру, может быть завершена схема, отвечающая за управление формой кресла (Канал 2). Кроме того, систему можно оснастить памятью, которая позволит автоматически настраивать кресло в то положение, которое выбрал водитель. Возможности доработки не ограничиваются только сиденьем. Вся система управления может включать множество блоков, выполняющие свои функции. К примеру, система может отвечать за настойку зеркал заднего вида, следить за напряжением бортовой сети, а при необходимости регулировать его, показывать скорость автомобиля.
АННОТАЦИЯ
В этой работе разработаны алгоритм и система управления положением кресла водителя, а также синтезирована микроконтроллерная система управления. Она предназначена для увеличения комфортабельности поездки в автомобиле. Рассмотрены и оценены возможные факторы, влияющие на процесс управления объектом.
THE SUMMARY
In this work is designed algorithm and managerial system by position of the easy chair of the driver, as well as synthesized микроконтроллерная managerial system. She is intended for increase comfort trips in car. They are considered and evaluated possible factors, influencing upon process of object management.
РЕФЕРАТ
Выпускная работа содержит 44 страницы машинописного текста, 11 рисунков, 1 таблицу, 3 источника.
Система управления, микроконтроллерная система, пространственно положение, давление
Цель работы – разработка системы управления положением кресла водителя.
В процессе выполнения работы были рассмотрены особенности управления автомобильным креслом. Синтезирован алгоритм управления креслом водителя с учетом различных внешних факторов.
Разработана микроконтроллерная система управления положением кресла водителя.
Рассмотрена экономическая целесообразность проекта.
Рассмотрена безопасность и экологичность данного проекта.
Результатом работы является система управления положением кресла водителя.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. 6
1 Автомобильное кресло, как объект управления.. 8
2 Математическая модель. 12
2.1 Математическая модель двигателя постоянного тока (ДПТ) 14
2.2 Алгоритм функционирования системы.. 18
3 Разработка структурной схемы.. 20
4 Устройство отдельных блоков системы.. 22
4.1 Микроконтроллер. 22
4.2 Канал 1. 26
5 экономическое обоснование проекта.. 30
5.1 Стоимостная оценка разработки. 30
5.2 Стоимостная оценка изделия. 32
6 Безопасность и экологичность проекта.. 33
6.1 Системный анализ безопасности и надежности при эксплуатации. 33
6.2 Меры по устранению отказов. 36
6.3 Защита окружающей природной среды и утлизация устройства. 38
7 Социальная значимость проекта.. 44
Заключение. 45
СПИСОК литературы.. 46
ВЕДЕНИЕ
В последнее время в связи с развитием непроизводственных сфер труда, человек стал много времени проводить сидя. Для того, что бы длительное нахождение в сидячем положении не доставляло больших неудобств, а как следствие не отвлекало от работы, сиденье должно быть удобным. Однако это не просто, так как у каждого человека индивидуальные потребности, связанные с формой тела, полнотой и рядом других факторов. Но производить сиденья для каждого человека индивидуально не представляется возможным.
Существует ряд видов деятельности, где сидеть необходимо. Примером может служить вождение автомобиля. Отличительной особенностью здесь является то, что водитель не может отвлекаться от дороги, что затрудняет его действия, в том числе в целях обеспечения собственного комфорта. Для водителя во время движения является проблемой изменить форму сиденья, так как это затребует некоторых усилий и отвлечения внимания от дороги, что может привести к печальным последствиям. Однако при длительных поездках изменение формы сидения необходимо, так как тело устает, находясь в одном и том же положение без движения. Решением этой проблемы может служить сиденье, оснащенное приводами и системой управления к ним. Такая система будет отбирать минимум внимания и не потребует никаких физических затрат водителя.
Тема дипломного проекта является актуальной, так как целью своей имеет создание комфорта для людей находящихся в автомобиле, что в свою очередь является немаловажным фактором при обеспечении безопасности на дороге.
Целью дипломной работы является разработка системы управления положением кресла водителя.
В работе решаются следующие задачи:
- разработка моделей и алгоритмов управления объектом с учетом особенностей данного объекта;
- разработка структурной и принципиальной схем системы управления.
Результаты работы являются практически полезными, т.к. могут найти применение при разработке реальных систем управления для применения их в автомобильных креслах, или же офисной мебели.
В первом разделе данной работы рассматриваются принципы построения управляемого объекта, его структура, особенности и проблематика управления системой на различных этапах управления.
Во втором разделе определяются входные, возмущающие и выходные переменные, описывается модель управляющего элемента, формулируется алгоритм функционирования системы в целом.
В третьем разделе описывается структурная схема системы в целом и основные принципы ее функционирования.
В четвертом разделе производится детальное описание частей системы.
В пятом разделе приводится экономическое обоснование актуальности разрабатываемого проекта, определяются капитальные и энергетические затраты.
В шестом разделе производится оценка напряженности труда разработчика, анализ условий труда разработчика и мероприятия по устранению вредных факторов, экологичность работы.
Автомобильное кресло, как объект управления
Суть управления автомобильным креслом состоит в том, чтобы расположить его необходимым образом в трехмерном пространстве. У него должен меняться угол наклона спинки, положение подушки и уровень подъема подголовника.
Схематически автомобильное кресло с возможными вариантами регулировок показано на рис. 1.
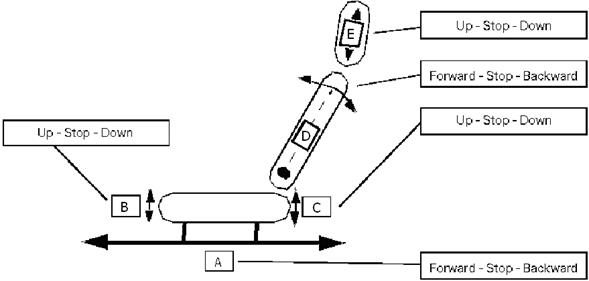
Рис. 1 Схема кресла с возможными вариантами регулировок
На рис. 1 изображена пространственная модель кресла. Оно состоит из основания сиденья, подушки, спинки и подголовника. Основание сиденья перемещается в продольном направлении, в заданных пределах от своего начального до конечного положения. У подушки сидения различают переднюю и заднюю кромки. И передняя и задняя кромки могут подниматься и опускаться в заданных пределах. Спинка сиденья может менять свой угол наклона, а подголовник опускаться и подниматься.
Кроме изменения пространственного положения, в данной модели может быть предусмотрено изменение формы спинки подушки. Для этого оно должна быть оснащена датчиками, расположенными как в спинке, так и в подушке. Схематическое расположение датчиков изображено на рис. 2.
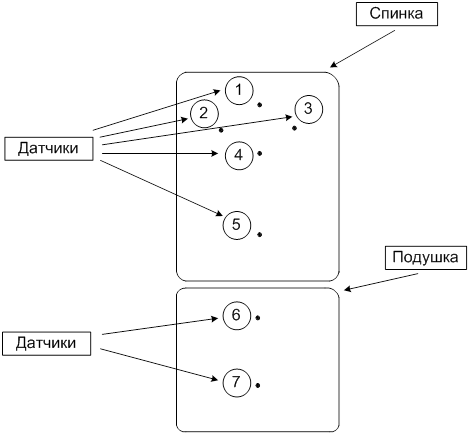
Рис. 2 Расположение датчиков на сиденье
На рис. 2 цифрами обозначены датчики давления, установленные в непосредственной близости с приводами, осуществляющими движение небольшой части сиденья с целью уменьшения давления на него. Подобная система позволит равномерно распределить нагрузку тела на сиденье, что должно повысить комфортабельность. Особенностью этой части является то, что она является полностью автономной, т.е. после ее запуска (нажатия соответствующей кнопки) она сама выполнит настойку, которая будет длиться некоторое, заранее заданное, время. Необходимо только, чтобы с начала ее работы и до конца человек сидел в сиденье, иначе настройка выполнена не будет. Так же желательно, что бы при ее работе человек сидел как можно спокойнее, иначе это может вызвать неправильные показания датчиков, что так же приведет к неверной настройке.
Панель управления всей системой может быть выполнена в виде набора кнопок или тумблеров, которые должны иметь три положения переключения, т.е. два рабочих и среднее, в котором контакты будут разомкнуты. Использование тумблеров в некоторой степени упростит управление, так как если для системы управления формой сиденья достаточно кратковременного замыкания контактов, то для управления его пространственным положением контакт необходимо сохранять до тех пор, пока требуемая часть не перейдет в желаемое положение.
При разработке данной системы, появляется ряд сложностей, с которыми необходимо справляться. К их числу можно отнести такие проблемы как: выбор двигателей, которые должны работать от бортовой сети автомобиля, т.е. 12 В, и при этом способных поднять вес человека; нестабильность бортовой сети автомобиля.
Для того чтобы поднять человека, двигатель должен создавать на выходе достаточно большой момент. Однако, учитывая, что напряжение питания двигателя ограничено напряжением бортовой сети автомобиля. Для увеличения момента на выходе двигателя необходимо использовать редуктор, который, понижая скорость на выходе, увеличит момент вращения.
Как известно автомобиль в то время, когда он не движется, питается от аккумулятора, который имеет на выходе достаточно стабильное постоянное напряжение, в котором отсутствую переменные составляющие. Однако во время движения питание бортовой сети автомобиля переключается на генератор, который выдает не всегда стабильное напряжение и может иметь высокочувствительные пульсации. Подобные импульсы могут привести к нестабильной работе системы, а даже способны испортить элементы схемы, в частности микроконтроллер, замена которого потребует дополнительных затрат. Для того, что бы устранить подобные случаи, на входе системы необходимо использовать сглаживающие элементы, в частности фильтры нижних частот с достаточно узкой полосой пропускания.
При выполнении данной работы должна будет получена система управления, взаимодействующая с человеком. Эта система должна получать сигналы от пользователя (водителя), которые после обработки идут на исполнительные механизмы. Так же должны анализироваться сигналы, поступающие с датчиков, на систему, которые либо накладывают ограничения на работу системы, либо полностью определяют ее. Так как в проекте решаются две относительно не связанные задачи – изменение пространственного положения кресла и изменение его формы, всю систему можно разбить на две составляющие подсистемы. Управление обоими частями должно осуществляться одним элементом, в качестве которого выступает микроконтроллер. Микроконтроллер также связывает панель управления с системой.
Математическая модель
При выполнении данной работы должна быть получена система управления, взаимодействующая с человеком. Эта система должна получать сигналы от пользователя (водителя), которые после обработки идут на исполнительные механизмы. Так же должны анализироваться сигналы, поступающие с датчиков, на систему, которые либо накладывают ограничения на работу системы, либо полностью определяют ее. Так как в проекте решаются две относительно не связанные задачи – изменение пространственного положения кресла и изменение его формы, всю систему можно разбить на две составляющие подсистемы. Управление обоими частями должно осуществляться одним элементом, в качестве которого выступает микроконтроллер. Микроконтроллер также связывает панель управления с системой.
При работе на любую систему поступает ряд воздействий, часть из которых предусмотрена самой системой, как правило, контролируема и называется вектором входных воздействий, а часть является неконтролируемой, оказывая в основном вредные воздействия, с которыми необходимо бороться, такие воздействия называются возмущающими или помехой. Сама система, обработав входные воздействия, с учетом возмущения, формирует на выходе некоторый выходной сигнал.
При рассмотрении данной системы входным воздействием является сигнал, поступающий с панели управления. Этот сигнал представляет собой единичный скачок.
На выходе системы стоит двигатель, который осуществляет изменение пространственного положения сиденья, следовательно, именно с него наблюдается выходное воздействие, оказываемое на сиденье. Данное воздействие представляет собой угол поворота двигателя, который в случае спинки передается непосредственно на сиденье, либо преобразуется в поступательное движение подушки или подголовника.
Возмущающих воздействий в системе, как правило, много. Однако в данной системе можно выделить одно, наиболее значимое воздействие, оказываемое человеком, а именно его массой. Это воздействие представляет собой момент сопротивления создаваемый на валу двигателя, что может привести к замедлению скорости последнего вплоть до полной остановки.
Дата: 2019-05-29, просмотров: 331.