При расчете параметров корректирующих устройств можно использовать любой из методов определения качества, но наиболее часто используют частотные методы, в частности, логарифмические частотные характеристики.
Рассмотрим, как по виду ЛАЧХ можно судить о качестве переходного процесса (рис. 4).
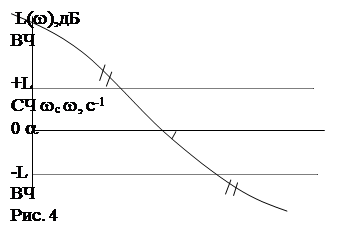 |
Характеристику разбивают на три части: НЧ - определяет статику; СЧ - определяет динамику; ВЧ – не играет роли.
Точка пересечения ЛАЧХ с осью абсцисс характеризует частоту среза - w с .
1. Время переходного процесса является функцией частоты среза tп = f( w с ); tп = c/ w с .
2. Число перерегулирований является функцией угла пересечения ЛАЧХ оси абсцисс N = f( a ). Обычно N = 2¸3, при этом a »-20 дБ/дек.
3. Величина перерегулирования является функцией запаса устойчивости по амплитуде – L. s % = f(L). Обычно s % = 20¸30, при этом L »20 дБ.
4. Порядок синтеза последовательного корректирующего устройства
Порядок синтеза последовательного корректирующего устройства рассмотрим на конкретном примере.
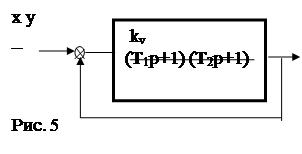
Пример 1. Дана система, схема которой приведена на рис. 5.
Пусть T1 = 1 c, T2 = 0,1 c, kv = 10 c-1. Необходимо синтезировать последовательное корректирующее устройство, обеспечивающее следующие показатели качества:
1. Величина статической ошибки e с = 0.
2. Частота среза желаемой системы w сж = 1 с-1.
3. Величина относительного перерегулирования s % = 20 ¸ 30.
4. Число перерегулирований N = 2 ¸ 3.
 |
Решение:
1. Строим ЛАЧХ заданной (реальной) системы (рис. 6).
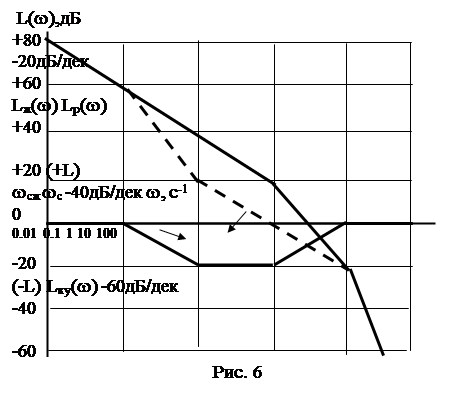 |
Строим ЛАЧХ желаемой системы исходя из следующего:
- для обеспечения требуемого времени переходного процесса ЛАЧХ желаемой системы должна пересекать ось абсцисс в точке w сж = 1с-1.
-для обеспечения требуемого числа перерегулирований N = 2 ¸ 3 угол пересечения ЛАЧХ оси абсцисс должен равняться a »-20 дБ/дек.
- для обеспечения требуемой величины перерегулирования s % = 20¸30 запас устойчивости по амплитуде должен равняться L = ±20 дБ.
-для обеспечения требуемой величины статической ошибки e с = 0 логарифмическая характеристика желаемой системы в области низких частот должна иметь наклон –20 дБ/дек.
3. Сочленяем ЛАЧХ исходной Lр ( w ) и желаемой системы Lж( w ) в области низких и высоких частот.
4. Вычитаем из ЛАЧХ исходной Lр ( w ) ЛАЧХ желаемой системы Lж( w ), и получаем ЛАЧХ корректирующего устройства Lку( w ).
5. По виду ЛАЧХ корректирующего устройства Lку( w ) определяем его структуру и параметры.
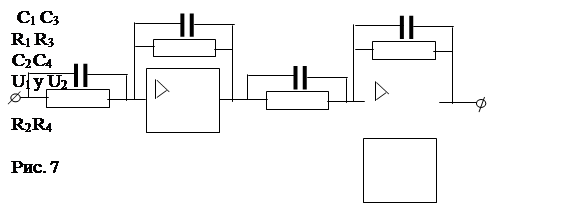
Для рассматриваемого примера, корректирующее устройство представляет собой интегро-дифференцирующее звено, передаточная функция имеет вид:

В зависимости от величин постоянных времени схемная реализация корректирующего устройства может быть различной:
- при 0 £ Ti £ 10 c-1 можно использовать пассивный RC –четырех-полюсник (рис. 3б);
- при 10 c-1 £ Ti £ 100 c-1 можно использовать активный фильтр (рис. 7);
- при Ti > 100 c-1 можно использовать цифровой фильтр.
 |
6. Записываем передаточную функцию скорректированной системы, строим переходный процесс и определяем показатели качества, если они удовлетворяют необходимым показателям, то процесс синтеза окончен.
Дата: 2019-05-28, просмотров: 318.