Все СИ перед эксплуатацией подлежат процедуре градуировки,
а в процессе эксплуатации — периодической процедуре поверки.
Градуировка — это операция нанесения на шкалу СИ отметок, соот-
ветствующих показаниям рабочего эталона (для измерительных
приборов), или определения градуировочной характеристики СИ (для
измерительных преобразователей). Поверка — это операция, прово-
димая метрологическими службами и заключающаяся в установлении
пригодности СИ к применению на основании экспериментально
определенных метрологических характеристик и контроля их соот-
ветствия НТД. Основной метрологической характеристикой, опреде-
ляемой при поверке СИ, является его погрешность. Она находится
на основании сравнения поверяемого СИ с более точным рабочим
эталоном.
Поверка измерительных приборов проводится одним из двух ме-
тодов:
1) непосредственное сравнение величин, измеряемых СИ, и ве-
личин, воспроизводимых рабочими эталонами соответствующего
класса точности;
2) непосредственное сличение показаний поверяемого и некото-
рого рабочего эталона при измерении одной и той же величины.
Основой данного метода служит одновременное измерение одного и
того же значения физической величины поверяемым СИ и рабочим
эталоном. Разность показаний этих приборов равна абсолютной по-
грешности поверяемого СИ.
Важным при поверке является выбор оптимального соотношения
между допускаемыми погрешностями рабочего эталона и поверяе-
мого СИ. Обычно рабочие эталоны выбираются таким образом,
чтобы это соотношение было 1:5.
Контрольные вопросы
1. Что означает понятие «метрология»?
2. В чем разница между истинным и действительным значением физиче-
ской величины?
3. Что такое шкала отношений? Приведите пример такой шкалы.
4. Что такое дольные и кратные единицы измерений?
5. Какие измерения относятся к косвенным? Приведите пример.
6. Какие причины могут привести к появлению аддитивной погрешно-
сти?
7. В чем заключается разница между погрешностью измерения и погрешно-
стью средства измерения?
8. Приведите классификацию средств измерения.
9. Что понимается под нормальными условиями измерения?
10. Может ли средство измерения иметь несколько классов точности?
11. В чем состоит разница между поверкой и градуировкой?
Гл а в а 2
ЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ МЕХАНИЧЕСКИХ ВЕЛИЧИН
Индуктивные датчики
Принцип работы индуктивных датчиков (ИД) основан на изме-
нении индуктивности или взаимоиндуктивности обмотки с магни-
топроводом вследствие изменения магнитного сопротивления маг-
нитной цепи датчика под воздействием измеряемой величины. ИД
относятся к классу параметрических датчиков. Наиболее широко ИД
применяются для преобразования линейных и угловых перемещений,
а также технологических параметров, преобразуемых в перемещение
(давление, расход и др.). Они также используются в дефектоскопии
для определения наличия дефектов, толщины немагнитных покрытий
на стали и в ряде других областей.
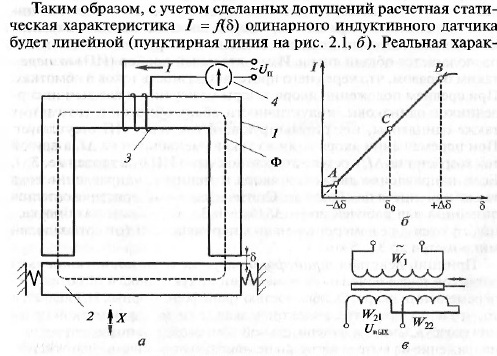
Простейший одинарный (однотактный) ИД линейного пере-
мещения (рис. 2.1, а) с переменным воздушным зазором 5, значение
которого является измеряемой величиной, состоит из сердечника 1,
подвижного якоря 2, связанного с контролируемым объектом X, и
обмотки питания 3, которая является одновременно измерительной
обмоткой. В этом датчике происходит цепочка преобразований
Х-» δ-» Rm -» L, где X— измеряемое перемещение; δ —
воздушный зазор между сердечником и якорем; R M — магнитное
сопротивление цепи датчика; Ф — магнитный поток; L — индуктив-
ность обмотки 3; Z— ее полное сопротивление; I — ток в обмотке.
Статическая характеристика датчика представляет собой зависи-
мость тока в обмотке от зазора δ. Ток I в обмотке

где Uп — напряжение питания; R — активное сопротивление обмот-
ки; ω — циклическая частота напряжения питания; L — индуктив-
ность обмотки.
Поскольку R << ω , активным сопротивлением можно пренебречь.
Индуктивность L и магнитный поток Ф равны соответственно
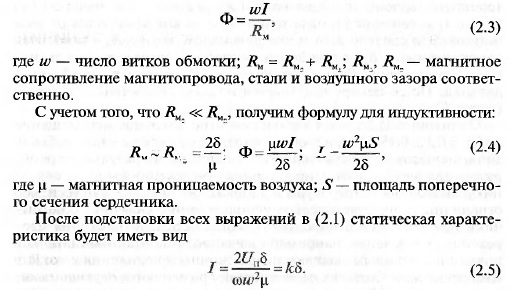
теристика (сплошная линия на том же рисунке) на начальном (до
точки А) и конечном (после точки В) участках отличается от рас-
четной. Это связано с тем, что при малом зазоре RM становится
сопоставимым с R m e , а при большом зазоре начинает влиять актив-
ное сопротивление R обмотки. Участок АВ является рабочей зоной
датчика. По ее центру выбирается начальное значение зазора δ0
(точка С).
Одинарные ИД имеют небольшое относительное перемещение
∆δ/δ0 = 0,1...0,15. Целый ряд недостатков, таких как малая рабочая
зона, невысокая чувствительность, влияние на результат преоб-
разования электромагнитного усилия притяжения якоря к сердеч-
нику, колебания температуры и напряжения питания, существенно
ограничивает их практическое использование. Обычно такие дат-
чики применяются в тех случаях, когда необходимо ступенчатое
релейное управление, например в качестве бесконтактных датчиков
положения, концевых выключателей, датчиков положения и др. Для
измерения же небольших перемещений применяются двухтактные
(реверсивные) ИД, включаемые по дифференциальной схеме. Эти
датчики состоят из двух сердечников, идентичных по конструктив-
ным и магнитным параметрам, с двумя также одинаковыми обмот-
ками, включенными последовательно и встречно. Между ними
располагается общий якорь. Измерительный прибор (ИП) включен
таким образом, что через него протекает разность токов в обмотках.
При среднем положении якоря зазоры между ним и каждым из сер-
дечников одинаковы, индуктивности обеих обмоток и токи в них
также одинаковы, т.е. результирующий ток через ИП отсутствует.
При перемещении якоря один из токов уменьшится на А/, а другой
ток возрастет на ∆I, в результате чего ток через ИП будет равен I = 2∆I.
Если направление движения якоря изменится, направление тока
также изменится на обратное. Статическая характеристика остается
линейной для рабочей зоны ∆δ/δ0 = 0,3 ...0,4. Такие датчики ис-
пользуются для измерения малых перемещений (от сотых долей
микрометра до 3 ... 5 мм).
Принцип действия трансформаторных (взаимоиндуктивных)
датчиков также основан на изменении индуктивности обмоток при
перемещении якоря. Особенностью трансформаторных ИД является
то, что в них отсутствует электрическая связь между обмоткой пита-
ния (возбуждения) и измерительной обмоткой, что позволяет менять
напряжение на выходе нагрузки независимо от величины напряжения
источника питания. Наводимая в измерительной обмотке ЭДС
Е равна

где Wи — число витков измерительной обмотки; ω — циклическая
частота напряжения питания; Ф — амплитуда магнитного потока; δ —
воздушный зазор между якорем и сердечником.
Следовательно, изменяя Wи, можно получить любое требуемое
значение выходного сигнала. Наибольшее распространение получил
дифференциально-трансформаторный датчик (рис. 2.1, в), принцип
действия которого основан на изменении потокосцепления между
двумя системами обмоток при перемещении подвижного плунжера.
Первичная обмотка W1 равномерно распределена по длине датчика.
Две одинаковые вторичные обмотки W21 и W22, расположенные на
разных половинах датчика, включены последовательно и встречно.
При симметричном расположении подвижного плунжера ЭДС Е г1 и
Е 22 наводимые во вторичных обмотках, компенсируют друг друга,
поэтому UВЫХ = 0. При перемещении плунжера появится выходное
напряжение UВЫХ = Е 21 - Е 22 , фаза которого будет зависеть от направ-
ления перемещения плунжера.
Существуют также трансформаторные датчики угла поворота.
Индуктивные датчики обладают такими достоинствами, как
простота конструкции и надежность в работе; большая выходная
мощность, позволяющая во многих случаях обойтись без усилителя;
высокая чувствительность и разрешающая способность; безынерци-
онность (при условии, что частота изменения измеряемого переме-
щения гораздо меньше частоты источника питания); наличие на
статической характеристике большого линейного участка; возмож-
ность работы непосредственно от сети переменного тока.
Емкостные датчики
Принцип действия емкостных датчиков (ЕД), которые также
являются датчиками параметрического типа, основан на изменении
емкости конденсатора под воздействием измеряемой величины. Чаще
всего ЕД выполняются в виде плоскопараллельного или цилиндри-
ческого конденсатора переменной емкости. Емкость С плоского ЕД
определяется по формуле

где ε0 — электрическая постоянная; ε — относительная диэлектри-
ческая проницаемость среды между пластинами; S — площадь пла-
стин; δ — расстояние (зазор) между пластинами.
Поскольку емкость датчика зависит от трех параметров (S, δ, ε), то
существуют ЕД трех типов: 1) датчики с переменной площадью пере-
крытия пластин — для измерения линейных и угловых перемещений,
усилий; 2) датчики с переменным зазором δ, которые используются для
измерения малых перемещений, быстропеременных параметров, таких
как вибрация, ускорение; 3) датчики с переменной диэлектрической
проницаемостью среды ε — для измерения уровня, влажности, концен
трации, в охранной сигнализации и др. Статические характеристики
датчиков перемещения будут соответственно иметь вид
где а — ширина пластин конденсатора; х — измеряемое перемещение;
δ0 — начальный зазор.
Емкостные датчики с переменным воздушным зазором целесооб-
разно использовать для измерения малых линейных перемещений
(менее 1 мм), причем максимальное перемещение X не должно пре-
вышать 0,180. Это позволяет выбрать на статической характеристике
достаточно линейный участок. Емкостный датчик с переменной
площадью перекрытия пластин используется для измерения больших
линейных (более 1 см) и угловых (до 180°) перемещений.
Измерение емкости датчиков производится мостовым, резонансным
или импульсным методом. Для повышения чувствительности использу-
ют источники питания высокой частоты (от 400 Гц до нескольких мега-
герц). Преимуществами емкостных датчиков являются простота кон-
струкции, высокая чувствительность, малая инерционность, небольшой
вес и габариты, отсутствие подвижных контактов, простота приспособ-
ления формы конденсатора к различным задачам; недостатками —
низкая выходная мощность, нестабильность характеристик при измене-
нии параметров окружающей среды, необходимость тщательной экра-
нировки датчика и применения высокочастотного источника питания.
Индукционные датчики
Индукционный датчик относится к генераторным датчикам и
представляет собой устройство, состоящее из обмотки и магнитной
системы, осуществляющее преобразование контролируемой скорости
линейных или угловых перемещений в ЭДС. Принцип действия
основан на зависимости ЭДС, индуктируемой в обмотке при изме-
нении магнитного потока, пронизывающего ее витки, от скорости
его изменения в соответствии с законом электромагнитной индукции
Фарадея.
Эта ЭДС е определяется выражением

где W — число витков обмотки; Ф — магнитный поток.
Индукционные датчики подразделяются на две группы: в первом
случае обмотка перемещается относительно постоянного магнита,
совершая линейное Х или угловое φ перемещение, а во втором фер-
ромагнитная деталь (якорь или кольцо), механически связанная с
источником перемещений, перемещается относительно неподвижных
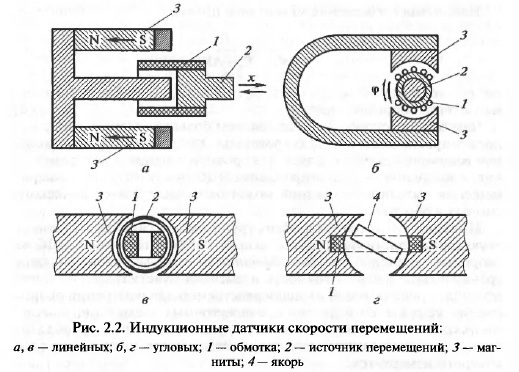
магнита и обмотки. У индукционного датчика скорости линейных
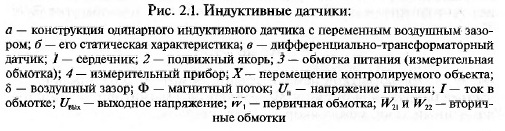
перемещений первого типа (рис. 2.2, а) обмотка, механически свя-
занная с подвижной частью устройства, перемещается относительно
магнитов; при этом ЭДС, индуктированная в обмотке, снимается
непосредственно с нее. У датчика угловых перемещений (рис. 2.2, б)
устройство аналогичное, но ЭДС снимается через коллектор. Маг-
нитный поток в обоих случаях постоянен и равен Ф. ЭДС Е на вы-
ходе датчика равна

где К п — коэффициент пропорциональности, определяемый кон-
структивными параметрами датчика; х, φ — линейное и угловое пере-
мещение соответственно.
В индукционных датчиках второй группы (рис. 2.2, в, г) обмотка
и магнитопровод неподвижны, а кольцо или якорь, связанные меха-
нически с контролируемым устройством, являются подвижными.
В этих датчиках поток Ф не является постоянным, что обусловлено
изменением во времени магнитного сопротивления.
Наибольшее изменение магнитного потока

где F — намагничивающая сила; R M и R M + ∆R M — крайние значения
магнитного сопротивления.
Чем больше скорость вращения, тем больше изменение магнит-
ного сопротивления и индуктированная ЭДС. Таким образом, вход-
ной величиной датчика является скорость вращения или перемеще-
ния, а выходной — индуктированная ЭДС (в случае углового пере-
мещения выходной величиной может быть частота электрического
сигнала в обмотке).
Индукционные датчики обеих групп имеют линейную статиче-
скую характеристику, представляющую собой зависимость ЭДС от
скорости перемещения. Достоинствами этих датчиков являются
сравнительно высокая точность и высокая чувствительность, что
позволяет использовать их непосредственно для измерения скоро-
сти без усилителей и других промежуточных элементов, а недо-
статками — влияние величины нагрузки на точность преобразо-
вания, а также наличие момента, действующего на вал, скорость
которого измеряется.
Вихретоковые датчики
Вихретоковый метод контроля основан на анализе взаимодей-
ствия внешнего электромагнитного поля с электромагнитным полем
вихревых токов, наводимых им в электропроводящем объекте кон-
троля. В качестве источника электромагнитного поля чаще всего
используется индуктивная катушка (одна или несколько), называе-
мая вихретоковым преобразователем (ВТП). Синусоидальный (или
импульсный) ток, действующий в катушках ВТП, создает электро-
магнитное поле, которое возбуждает вихревые токи в электропро-
водящем объекте. Электромагнитное поле вихревых токов воздей-
ствует на катушки преобразователя, наводя в них ЭДС или изменяя
их полное электрическое сопротивление. Регистрируя напряжение
на катушках или их сопротивление, получают информацию о свой-
ствах объекта или о положении преобразователя относительно него.
Особенность вихретокового контроля в том, что его можно прово-
дить без контакта преобразователя и объекта. Их взаимодействие
происходит на расстояниях, достаточных для свободного движения
преобразователя относительно объекта (от долей миллиметров до
нескольких миллиметров). Поэтому этими методами можно получать
хорошие результаты контроля даже при высоких скоростях движения
объектов.
Вихретоковые датчики (ВТД) используются для бесконтактного
измерения вибрации, перемещения и частоты вращения электро-
проводящих объектов. Они применяются для диагностики состояния
промышленных турбин, компрессоров, электромоторов. Наиболее
часто объектом контроля являются осевое смещение и радиальная
вибрация вала ротора относительно корпуса. ВТД используются так-
же для контроля качества электропроводящих объектов (обнаружение
несплошностей материалов) в дефектоскопии, толщины изоляцион-
ного слоя на металлическом основании (толщинометрия), обнаруже-
ния электропроводящих объектов, например трубопроводов (метал-
лоискатели) в качестве бесконтактных концевых выключателей.
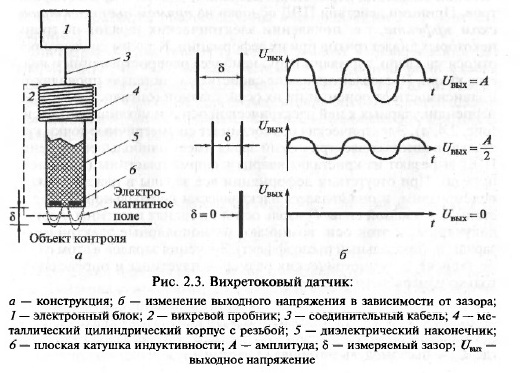
Вихретоковый датчик состоит из вихревого пробника 2 и элек-
тронного блока 1, соединенных кабелем 3 (рис. 2.3, а). В торце ди-
электрического наконечника 5 вихревого пробника находится катуш-
ка индуктивности 6 (одна или несколько). Электронный блок воз-
буждает в ней электромагнитные колебания, в результате чего
возникает электромагнитное поле, взаимодействующее с материалом
контролируемого объекта. Если материал обладает электропровод-
ностью, на его поверхности наводятся вихревые токи, которые, в свою
очередь, изменяют параметры катушки — ее активное и индуктивное
сопротивление. Степень этого изменения зависит от зазора между
контролируемым объектом и торцом датчика; значение этого зазора
является входным параметром датчика. Оно составляет несколько
миллиметров и зависит от диаметра катушки, заключенной в торце
диэлектрического наконечника. Выходным сигналом является на-
пряжение, пропорциональное измеряемому зазору (рис. 2.3, б)\
обычно оно составляет несколько мВ на 1 мкм. Пробник может иметь
различное конструктивное выполнение, так как его конструкция за-
висит от места монтажа и диапазона измерения.
Приоритетной областью использования вихретоковых датчиков,
как уже упоминалось, является контроль осевого смещения и попе-
речного биения валов больших турбин, компрессоров, электромото-
ров, в которых используются подшипники скольжения. Вихретоковый
метод обеспечивает высокую точность, поскольку не имеет нижнего
предела по частоте вибрации и не требует математической обработки
результатов измерения ввиду прямого соответствия выходного сиг-
нала текущему смещению вала или измерительного буртика относи-
тельно корпуса.
Пьезоэлектрические датчики
Пьезоэлектрическим датчиком (ПЭД) называется устройство,
использующее пьезоэлектрический эффект для преобразования пере-
менных механических усилий в количество электричества (заряд).
ПЭД относятся к генераторным датчикам и используются для из-
мерения вибраций, переменных давлений, усилий и других параме-
тров. Принцип действия ПЭД основан на прямом пьезоэлектриче-
ском эффекте, т. е. появлении электрических зарядов на гранях
некоторых диэлектриков при их деформации. К таким диэлектрикам
относятся кварц, турмалин и др., наиболее распространенным явля-
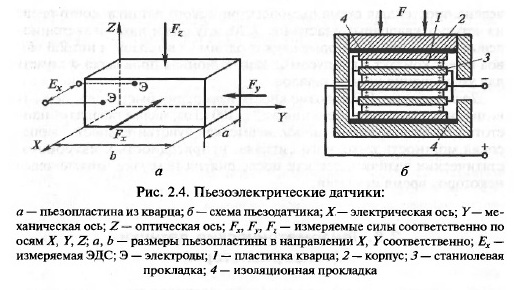
ется кварц. Пьезоэлектрические свойства в кристаллах проявляются
в зависимости от ориентации их осей: главной (оптической) оси Zи
перпендикулярных к ней электрической оси Хи механической оси Y
(рис. 2.4, а). Электрическая ось соединяет симметричные точки кри-
сталла, в которых электрический заряд имеет наибольшее значение.
ПЭД вырезают из кристалла кварца в форме пластины (параллеле-
пипеда). При отсутствии деформации все заряды в пластине ском-
пенсированы, и она является электрически нейтральной. При дей-
ствии измеряемой силы F x вдоль оси Хна гранях пластины, перпен-
дикулярных к этой оси, возникают разнополярные электрические
заряды q x (продольный пьезоэффект). Значения зарядов в этом случае
не зависят от геометрических размеров пластины и определяются
только измеряемым усилием:

где Кп — пьезомодуль материала пластины
Если пластину подвергнуть сжатию по оси Y, то заряды снова
появятся на тех же гранях, но их знак будет противоположным. Кро-
ме того, в этом случае значение заряда будет зависеть от размеров
пьезопластины:

где а, b — размеры пьезопластины в направлении X, У соответ-
ственно.
Знаки зарядов на гранях пластины зависят от направления из-
меряемого усилия (сжатие или растяжение). При приложении силы
вдоль оси Z пъезоэффект не возникает, так же как и при одновремен-
ном сжатии по всем осям. Для съема сигнала на гранях, перпендику-
лярных к оси X, устанавливаются специальные обкладки, с которых
снимается ЭДС Е, равная
где ε0 — электрическая постоянная; ε — диэлектрическая проницае-
мость материала пластины; Jx— площадь грани, перпендикулярной
к оси Х,а — толщина пластины.
Обычно для увеличения чувствительности пьезодатчика несколь-
ко пластин соединяются параллельно; при этом заряды одноименно
заряжающихся плоскостей должны складываться. На рис. 2.4, б при-
ведена простейшая схема пьезоэлектрического датчика, состоящего
из четырех кварцевых пластинок 1. Между ними находятся станио-
левые прокладки 3, которые служат одним из выводов, а второй вы-
вод имеет контакт с корпусом 2. Изоляционная прокладка 4 служит
для уменьшения утечки зарядов.
Достоинства ПЭД: возможность измерения быстропеременных
величин (с частотой изменения до 7... 100 кГц), малые габариты, про-
стота устройства; недостатки: невысокая чувствительность, невы-
сокая мощность выходного сигнала, непригодность к измерению
статических величин, так как после снятия нагрузки заряды через
некоторое время исчезают.
Тензометрические датчики
(тензорезисторы)
Принцип действия тензорезисторов (TP) основан на явлении
тензоэффекта — изменении активного электрического сопротив-
ления проводниковых и полупроводниковых материалов при дефор-
мации под воздействием механических усилий. Связь между измене-
нием сопротивления тензорезистора и его деформацией устанавли-
вается соотношением

где ∆R/ R — относительное изменение сопротивления тензорезисто-
ра; ∆l/l — относительное изменение его длины; St — коэффициент
тензочувствительности, определяемый материалом ТР.
Тензочувствительность считается положительной, если ∆R/R> О,
и отрицательной, если ∆R/R< 0.
Металлы, используемые для изготовления тензорезисторов (кон-
стантан, нихром, хромель), имеют значение SТ = 2,0 ...2,5. Провод-
никовые тензорезисторы бывают двух видов: проволочные и фольго-
вые. Они используются в основном для измерения деформаций и
напряжений в механических конструкциях. Проволочный тензоре-
зистор выполняется из проволоки диаметром 0,02 ... 0,05 мм, которая
наклеивается на бумагу или изоляционную пленку в виде петель и
покрывается лаком; концы проволоки с помощью выводов подклю-
чаются к измерительной схеме. Тензорезистор наклеивается на по-
верхность детали так, чтобы длинная сторона петель (база датчика)
совпадала с направлением измеряемой деформации. Длина петель
составляет обычно 5... 20 мм; сопротивление тензорезистора —
30... 500 Ом. Изменение сопротивления, вызванное деформацией,
очень мало (от тысячных до десятых долей ома), поэтому для его из-
мерения используются мостовые схемы, причем тензорезисторы
включаются в два или четыре плеча измерительного моста. Статиче-
ская характеристика тензорезистора определяется выражением

где R u — начальное сопротивление тензорезистора (при отсутствии
деформации); σ — измеряемая деформация.
Знак в формуле (2.18) зависит от вида деформации: «+» — для рас-
тяжения и «-» — для сжатия.
Фольговый TP аналогичен проволочному, но его решетка выпол-
нена из константановой фольги прямоугольного сечения толщиной
4... 12 мкм. Такие тензорезисторы обеспечивают большую точность
преобразования, так как на них не сказываются поперечные дефор-
мации.
К достоинствам проводниковых тензорезисторов относятся: про-
стота конструкции, малые габариты, возможность измерения механи-
ческих параметров статических и динамических процессов; к недо-
статкам — невысокая чувствительность, большая температурная
погрешность, требующая специальных схем компенсации, одноразовость
использования (при снятии с детали тензорезистор разрушается).
Полупроводниковые тензорезисторы имеют ряд преимуществ
перед проводниковыми, прежде всего гораздо большую чувствитель-
ность (в 50... 60 раз). Однако малая механическая прочность, нели-
нейность статической характеристики, сильное влияние внешних
условий и большой разброс параметров внутри одинаковой партии
долго ограничивали их применение. И только после того как появи-
лась возможность изготавливать тензорезистор непосредственно на
кристаллическом элементе, выполненном из диэлектрика, чаще все-
го сапфира, полупроводниковые тензорезисторы стали исключитель-
но популярными. Такая монокристаллическая структура получила
название «кремний на сапфире» — КНС. Сапфировая мембрана об-
ладает упругими свойствами, приближающимися к идеальным. Сцеп-
ление кремниевых тензорезисторов с мембраной за счет молекуляр-
ных сил позволяет отказаться от использования клеящих материалов
и улучшить метрологические характеристики преобразователей.
Планарная технология позволяет одновременно формировать в по-
лупроводнике тензорезисторы, элементы термокомпенсации и ми-
кроэлектронный блок обработки сигнала. Тензорезисторы мостовой
схемы можно располагать на мембране так, что при деформации они
будут иметь разные по знаку приращения сопротивления, что повы-
шает чувствительность тензодатчика в целом. Более подробно эти
датчики будут рассмотрены в гл. 5.
Контрольные вопросы
1. В изменение какой величины преобразуется механическое перемещение
в индуктивных датчиках?
2. В чем заключается основное различие между индуктивными и взаимо-
индуктивными (трансформаторными) датчиками?
3. Какие виды емкостных датчиков вы знаете?
4. На какие группы подразделяются индукционные датчики?
5. Для контроля каких параметров насосно-компрессорного оборудования
можно использовать вихретоковые датчики?
6. Одной из областей использования вихретоковых датчиков является тол-
щинометрия — определение толщины слоя диэлектрика на металличе-
ском основании. Можно ли использовать ВТД для измерения слоя ме-
таллизации на диэлектрическом основании?
7. Почему пьезоэлектрические датчики нельзя использовать для измере-
ния статических величин?
8. С какой целью в пьезодатчиках используют несколько пьезопластин,
соединенных параллельно?
9. В чем заключаются особенности тензорезисторного датчика структуры
КНС?
Гл а в а 3
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
Дата: 2019-04-23, просмотров: 423.