Подруливающее устройство (ПУ) является одним из наиболее распространенных вспомогательных средств управления судном. Устройство предназначено для управления судном на малых ходах, то есть в условиях, когда эффективность основных средств управления чаще всего оказывается недостаточной.
Существует большое число модификаций ПУ. Общим конструктивным признаком для всех ПУ является наличие поперечного канала в подводной части корпуса судна и встроенного в него насоса. (рис. 53)
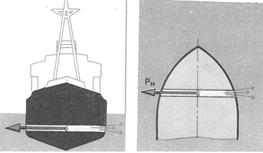
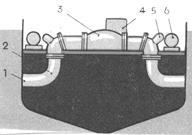
Рис. 53 Схема подруливающего устройства насосного типа:
1 – заборные сопла; 2 – конечные отрезки трубопровода; 3 – насос; 4 – привод насоса; 5 – клинкеты; 6 – приводы клинкетов
По месту расположения на судне различают носовые и кормовые ПУ. Те и другие стремятся размещать на возможно большем удалении от миделя для увеличения вращающего судна момента.
Применение подруливающих устройств эффективно при выполнении швартовных операций и особенно в условиях ветра и течения. Включением ПУ судоводитель может обеспечить движение судна лагом, оборот судна на месте, удержание судна в определенной позиции под действием внешних факторов и т. п.
Подруливающее устройство находят широкое применение на грузовых и пассажирских судах. Для правильного использования судоводителю необходимо знать область их эффективного применения и влияние на поворотливость судна.
Таблица 6
Характеристики подруливающих устройств
| Тип судна | Тип ПУ | Максимальная мощность, кВт | Максимальный упор, кН | Регулируемость упора |
| Пассажирский дизельный электроход типа «Ленин» Пассажирский теплоход типа «Родина» Пассажирский теплоход типа «Октябрьская революция» Грузовой теплоход проекта № 507 Грузовой теплоход проекта № 507 А | Водометное Водометное Роторное Водометное Водометное | 180 50 53 47,5 90 | 14,2 4,9 8,8 7,3 13,2 | Регулируется Не регулируется Регулируется Не регулируется Не регулируется |
Поскольку тяга ПУ в большинстве случаев направлена нормально к ДП, движение при отсутствие течения и ветра под действием только упора ПУ сводится к вращению судна. Однако это вращение неизбежно сопровождается перемещением судна в сторону оконечности, на которой расположено ПУ, так что, строго говоря, под действием одного ПУ вращение судно на месте не возможно. Поскольку сила упора ПУ приложена в оконечности, центр поворота должен располагаться между центром тяжести G и противоположной оконечностью судна. При этом центр тяжести будет иметь окружную скорость и, следовательно, на судно будет действовать центробежная сила, направленная в сторону ПУ и вызывающая смещение судна. Судно, вращаясь, перемещается в сторону оконечности, на которой расположена ПУ. Перемещение может быть нейтрализовано работой винтов.
Если на двигающимся вперед судне включить носовое подруливающее устройство, то под действием силы  возникает дрейф носа судна в сторону поворота. Наличие дрейфа приводит к появлению угла дрейфа, поток воды первоначально набегавший параллельно ДП, начинает набегать на внутренний (по отношению к направлению поворота) борт. Это обуславливает возникновение силы бокового сопротивления
возникает дрейф носа судна в сторону поворота. Наличие дрейфа приводит к появлению угла дрейфа, поток воды первоначально набегавший параллельно ДП, начинает набегать на внутренний (по отношению к направлению поворота) борт. Это обуславливает возникновение силы бокового сопротивления  , приложенная, как правило, ближе к носу от центра тяжести судна и направлена противоположно дрейфу. Общий поворачивающий момент будет состоять из трех моментов:
, приложенная, как правило, ближе к носу от центра тяжести судна и направлена противоположно дрейфу. Общий поворачивающий момент будет состоять из трех моментов:
 , (89)
, (89)
где  - момент упора подруливающего устройства;
- момент упора подруливающего устройства;
 - позиционный момент сопротивлению движению;
- позиционный момент сопротивлению движению;
 - демпфирующий момент сопротивлению движения.
- демпфирующий момент сопротивлению движения.
Если на том же судне имеется кормовое подруливающее устройство(рис.54), то при его включении возникает дрейф кормы судна в сторону, противоположную повороту судна, поток воды начнет набегать на борт, внешний по отношению к повороту. Схема сил и моментов будет аналогично возникающей при перекладке руля. Общий поворачивающий момент:
 , (90)
, (90)
где  - момент силы упора кормового подруливающего устройства.
- момент силы упора кормового подруливающего устройства.
Сравнивая уравнения, видим, что при условии равенства поворачивающих моментов носового и кормового подруливающих устройств  , так как позиционный момент при работе кормового подруливающего устройства способствует повороту, а при работе носового – препятствует ему. Отсюда при движении передним ходом целесообразнее применять при маневрировании кормовое, а при движении на заднем ходу – носовое подруливающее устройство.
, так как позиционный момент при работе кормового подруливающего устройства способствует повороту, а при работе носового – препятствует ему. Отсюда при движении передним ходом целесообразнее применять при маневрировании кормовое, а при движении на заднем ходу – носовое подруливающее устройство.
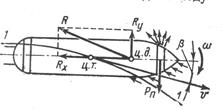
Рис. 54 Схема сил действующих на судно при повороте с помощью носового подруливающего устройства:  - упор подруливающего устройства; R – сила сопротивления воды;
- упор подруливающего устройства; R – сила сопротивления воды;  - составляющие силы R;
- составляющие силы R;  - угол дрейфа;
- угол дрейфа;  - скорость движения судна;
- скорость движения судна;  - угловая скорость судна; 1-1 – циркуляция судна
- угловая скорость судна; 1-1 – циркуляция судна
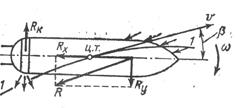
Рис. 55 Схема сил, действующих на судно при повороте с помощью кормового подруливающего устройства: - сила упора подруливающего устройства; 1- 1 - циркуляция
С увеличением скорости движения подруливающее устройства становятся мало эффективными, поэтому их следует применять, при маневрах производящихся на малых скоростях.
Если на судне носовое и кормовое подруливающее устройства, то для осуществления движения лагом достаточно включить оба подруливающих устройства на один борт, а для оборота «на месте» - на разные борта. Скорость движения лагом при этом составляет 0,3 – 0,4 м/с, угловая скорость поворота 4 – 5 град/мин.
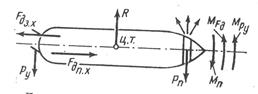
Рис. 56 Схема сил, действующих на судно при движении лагом с помощью носового подруливающего (R – сила сопротивления воды корпуса судна)
Движение судна лагом и оборот «на месте» можно производить и с одним подруливающим устройством, используя его совместно с работой движителей и руля. Например, для сообщения судну движение лагом вправо нужно включить носовое подруливающее устройство на правый борт, левой машине дать задний, а правый – передний ход и переложить руль влево на 10 – 15 градусов. Схема сил действующих на судно в этом случая показана на рис. 52. Если сумма моментов относительно центра тяжести судна от движителей  и руля
и руля  , создающая поворот влево, будет равна моменту от подруливающего устройства
, создающая поворот влево, будет равна моменту от подруливающего устройства  , создающего поворот вправо,
, создающего поворот вправо,
 (91)
(91)
то судно разворачиваться не будет и за счет сил и  будет двигаться лагом.
будет двигаться лагом.
Для разворота «на месте» носовое подруливающее устройство нужно включить в сторону поворота. Например, для поворота влево «на месте» схема сил аналогична изображенной на рис. 56, за исключением того, что сила будет направлена в противоположную сторону, и сила R = 0. Тогда
 (92)
(92)
Весьма эффективным оказывается использование носового ПУ при маневрировании на заднем ходу судна. В этом случае удается создать боковую силу в задней по ходу оконечности судна, момент которой будет действовать согласованно с моментом поперечной корпусной силы.
Указанные особенности обусловили широкое применение ПУ на судах различных типов. Потребная тяга ПУ выбирается обычно в зависимости от площадей проекции на ДП надводной части судна и его подводной части. (см. раздел 4.1)
Суда с развитой надстройкой оснащаются несколькими ПУ. На крупных морских лайнерах и автопассажирских паромах их число достигает 6 (по три в носу и корме).
Отличительной особенностью ПУ является резкое снижение силы тяги с увеличением скорости движения. Объясняется это образованием зоной разрежения позади струи выброса ПУ, взаимодействует со сносящим потоком. Распределение по борту разрежение дает в качестве результирующей вредную силу засасывания, направленную в сторону, противоположную действие тяги ПУ. Таким образом суммарная сила, действующая на судно и ее момент с увеличением скорости уменьшается.
Подруливающими устройствами оборудованы практически все суда типа Ро-Ро. В сочетании с рулем и винтом ПУ обеспечивает высокую маневренность судна: возможность разворота на месте при отсутствии хода, при этом центр вращения О располагается позади ЦТ судна на расстоянии, примерно равно 0,15 L, где L – длина судна.
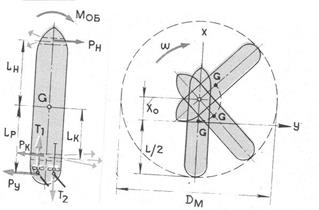
Рис. 57 Поворот судна на месте при работе носового и кормового ПУ
Вращательный эффект от работы гребного винта может быть легко преодолен НПУ. При достаточном заднем ходе и работе НПУ почти нет разницы, какого вращения винт, правостороннего или левостороннего. Удерживая нос немного левей от выбранного курса,
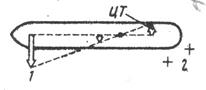
Рис. 58 Действие носового подруливающего устройства на заднем ходу:
1 – сила НПУ; 2 – боковое сопротивление.
Можно легко компенсировать вращательный эффект винта правостороннего вращения; если винт левостороннего вращения, то следует удерживать нос, несколько правее выбранного курса.
При швартовке кормой НПУ оказывает хорошую помощь давая почти полное управление носом, когда судно движется задним ходом. Поскольку легче погасить задний ход, дав машине ход вперед, чем остановить судно на переднем ходу, то постановка кормой в принципе безопаснее, чем постановка носом.
Эффективность устройства значительно снижается, если на пути струи выбрасываемой из туннеля, есть препятствие. В эксплуатационных условиях, особенно при швартовых операциях, такими препятствиями могут быть стенки причалов, каналов, борта других судов и др. Между бортом и стенкой за счет действия вытекающей струи возникает зона разрежения, в то время как с другого борта давление остается неизменным.
ОГЛАВЛЕНИЕ
Условные обозначения
Введение
1. Основные понятия и определения. Судно как управляемая система.
2. Кинематические параметры движения судна
3. Усилия ,действующие на судно при произвольном движении.
3.1 Общая математическая модель плоского произвольного движения судна
3.2 Гидродинамические усилия, действующие на корпус судна.
3.2.1. Силы, обусловленные инерционностью воды.
3.2.2. Силы, обусловленные вязкостью воды.
3.3. Усилия, индуцируемые движительно-рулевым комплексом (ДРК ).
3.3.1. Общие сведения.
3.3.2. Силы, создаваемые гребным винтом.
3.3.3. Силы, создаваемые рулевым органом.
3.4. Влияние корпуса судна на рулевую силу.
3.5. Силы, возникающие на комплексе «винт-насадка».
4 Нормирование управляемости судов.
4.1. Представление информации о маневренных качествах судна.
4.2. Полюс поворота как критерий поворотливости судов.
4.3. Элементы циркуляции .
4.3.1 . Крен судна на циркуляции.
4.4. Устойчивость судов на курсе.
4.5. Инерционные характеристики судов.
4.6. Управляемость на заднем ходу.
4.7 . Влияние различных конструктивных и эксплуатационных особенностей судна на его маневренные качества.
4.8. Определение маневренных характеристик судов в натурных условиях.
5. Особенности управления судов с различным количеством винтов.
5.1. Управление одновинтовым судном.
5.2. Управление двухвинтовым судном.
5.3. Управление трехвинтовым судном.
5.4. Управление судном, оборудованным поворотными насадками.
5.5. Применение подруливающих устройств
Библиографический список.
Библиографический список
1.Алексеев Л.Л. Практическое пособие по управлению морским судном.С-Пб. ЗАО
2.Гофман А.Д. Осеовы управляемости судна.С-Пб.1999,100с. 3.Лихачев А.В. Управление судном.С-Пб Изд-во Политех.университета,2004,503с..
4.Снопков В.И. Управление судном.С-Пб,»Профессионал»-2004,535с.
5.Соларев Н.Ф.,Белоглазов В.И.,Тронин В.А. и др. Управление судами и составами.Учебник для вузов.-М.Транспорт,1983.-296с.
6.Ходкость и управляемость судовПод редакцией Павленко В.Г.-М.Транспорт,1991.-397с.
7.Временные нормы управляемости толкаемых составов внутреннего плаания.РТМ2120126-86,Л.1987.
8.Инструкция по нормированию габаритов судов и толкаемых составов.-М.-1978.
9.Нормы управляемости грузовых и пассажирских судов внутреннего и смешанного «река-море»плавания.РТМ 212.0131-86.Л.1987.
10.Расчет маневренности и проведение натурных маневренных испытаний судов внутреннего и смешанного плавания.Руководство Р 006-2004.М.2004.
11.Резолюция ИМО 751(18),Промежуточные стандарты маневренных качеств
12.Резолюция ИМО А..601(15).Представление на судах информации об их маневренных характеристиках.
13.Руководство по определению маневренных характеристик судов.РМРС,1999.
Дата: 2019-03-05, просмотров: 429.