Какова схема замещения АД?
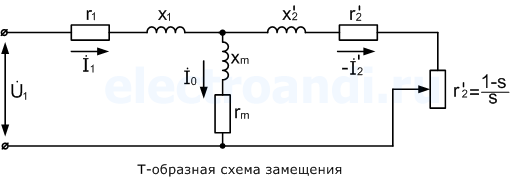
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию поэтому на схеме замещения добавляют переменное активное сопротивление r2'(1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн.
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.
Более удобной при практических расчетах является Г-образная схема замещения.
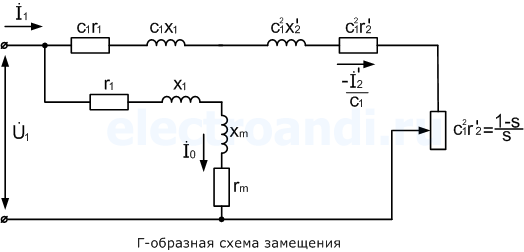
В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения, подводимого к двигателю, к ЭДС статора.

Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Чем объясняется большой ток холостого хода?
Ток холостого хода двигателя и потребляемая им реактивная мощность значительно возрастают в случае работы от сети с напряжением выше номинального. Поэтому во время эксплуатации необходимо следить за напряжением цеховых сетей и не допускать отклонения его от номинального. Величина тока холостого хода асинхронного двигателя возрастает также вследствие низкого качества ремонтных работ: неправильное соединение секций обмоток, изменение при перемотке обмоточных данных по сравнению с паспортными и увеличение величины воздушного зазора.
Регулирование частоты вращения асинхронных двигателей
n2 =n1(1 - s) = (f160/ p)(l - s). (15.2)
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой - либо из трех величин: скольжения s, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р.
Регулирование частоты вращения изменением скольжения s возможно тремя способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения и изменением активного сопротивления обмотки ротора.
Регулировка частоты вращения изменением скольжения происходит только в нагруженном двигателе. В режиме холостого хода скольжение, а следовательно, и частота вращения остаются практически неизменными.
Регулирование частоты вращения изменением подводимого напряжения. При неизменной нагрузке на валу двигателя увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя, ограниченным значением критического скольжения и недопустимостью значительного превышения номинального значения напряжения. Последнее объясняется тем, что с превышением номинального напряжения возникает опасность чрезмерного перегрева двигателя, вызванного резким увеличением электрических и магнитных потерь. В то же время с уменьшением напряжения U1двигатель утрачивает перегрузочную способность, которая, как известно, пропорциональна квадрату напряжения сети
Подводимое к двигателю напряжение изменяют либо регулировочным автотрансформатором, либо реакторами, включаемыми в разрыв линейных проводов.
Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии подводимой к двигателю трехфазной системы напряжения вращающееся поле статора становится эллиптическим. При этом поле приобретает обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр. В итоге результирующий электромагнитный момент двигателя уменьшается (М = Мпр - Мобр).
Для регулировки не симметрии подводимого напряжения можно в цепь одной из фаз включить однофазный регулировочный автотрансформатор (AT) (рис. 15.10, б). При уменьшении напряжения па выходе AT не симметрия увеличивается и частота вращения ротора уменьшается. Недостатками этого способа регулирования являются узкая зона
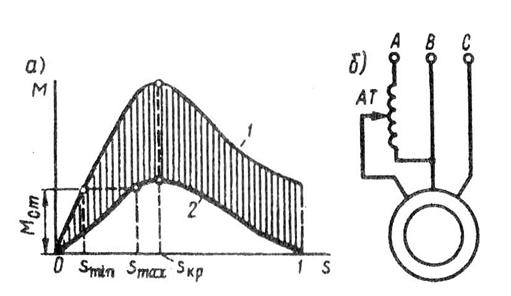
регулирования и уменьшение КПД двигателя по мере увеличения не симметрии напряжения. Обычно этот способ регулирования частоты вращения применяют лишь в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора. Этот способ регулирования частоты вращения возможен лишь в двигателях с фазным ротором. Механические характеристики асинхронного двигателя, построенные для различных значений активного сопротивления цепи ротора (см. рис. 13.6), показывают, что с увеличением активного сопротивления ротора возрастает скольжение, соответствующее заданному нагрузочному моменту. Частота вращения двигателя при этом уменьшается.
Практически изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата (РР), подобного пусковому реостату (ПР) (см. рис. 15.2), но рассчитанного на длительный режим работы.
Электрические потери в роторе пропорциональны скольжению (Рэ2 = sPэм), поэтому уменьшение частоты вращения (увеличение скольжения) сопровождается ростом электрических потерь в цепи ротора и снижением КПД двигателя. Так, если при неизменном нагрузочном моменте на валу двигателя увеличить скольжение от 0,02 до 0,5, что соответствует уменьшению частоты вращения примерно вдвое, то потери в цепи ротора составят почти половину электромагнитной мощности двигателя. Это свидетельствует о неэкономичности рассматриваемого способа регулирования. К тому же необходимо иметь в виду, что рост потерь в роторе сопровождается ухудшением условий вентиляции из-за снижения частоты вращения, что приводит к перегреву двигателя.
Но несмотря на указанные недостатки, рассмотренный способ регулирования частоты вращения широко применяется в асинхронных двигателях с фазным ротором. В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным (при плавном изменении сопротивления РР) или ступенчатым (при ступенчатом изменении сопротивления РР).
Способ обеспечивает регулирование частоты вращения в широком диапазоне, но только вниз от синхронной частоты вращения. Вместе с тем он обеспечивает двигателю улучшенные пусковые свойства
Регулирование частоты вращения изменением частоты тока в статоре. Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения n1 = f1 60/ р .
Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться электромашинные, ионные или полупроводниковые преобразователи частоты (ПЧ). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1. Но с изменением частоты f1 = ω1p/ (2π) будет изменяться и максимальный момент [см. (13.18)]. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и напряжение питания U1.
6. В каких элементах выделяются потери в стали? Работа асинхронного двигателя, как и любой другой машины, сопровождается потерями. Потери в конечном итоге, приводят к нагреву двигателя и снижению его КПД.
КПД асинхронного двигателя, представляет собой отношение полезной мощности на выходе P2 к подводимой двигателю мощности P1, выраженная в процентах
Мощность, подводимая к двигателю
где m – количество фаз, U1 – напряжение на статорной обмотке, I1 – ток в статорной обмотке, cosφ1 – коэффициент мощности двигателя
Полезная мощность на выходе P2, меньше подводимой мощности P1 на величину суммарных потерь ∑P
Потери ∑P складываются из магнитных, электрических и механических потерь
В первую очередь часть подводимой мощности P1 расходуется на покрытие магнитных Pм1 и электрических Pэ1 потерь в статоре
Электрические потери в статоре
где r1 активное сопротивление обмотки статора
Магнитные потери в статоре приблизительно определяются как
где f1 – частота тока перемагничивания, которая равна частоте тока в сети. V = 1.3-1.5. Магнитные потери в роторе малы настолько, что ими при практических расчетах пренебрегают. Это связано с малой частотой перемагничивания ротора.
Мощность, оставшаяся после восполнения потерь в статоре, называется электромагнитной и равна
Электромагнитная мощность передается ротору с помощью магнитного поля, через воздушный зазор δ. Часть электромагнитной мощности затрачивается на электрические потери в роторе, которые пропорциональны скольжению
Отсюда можно получить выражение для скольжения

Не трудно заметить, что с увеличением скольжения электрические потери в роторе также увеличиваются, а это в свою очередь вызывает уменьшение КПД.
В асинхронных двигателях с фазным ротором, присутствуют потери в щеточном узле, которые обычно добавляют к электрическим потерям в роторе
где I2 – ток ротора, Uщ – падение напряжения на пару щеток
Оставшаяся мощность называется механической
Часть механической мощности расходуется на механические и добавочные потери.
К механическим, относятся потери от трения в подшипниках, щетках и вентиляционные.
К добавочным потерям относят все остальные трудно учитываемые потери, которые, как правило, состоят из пульсационных и поверхностных потерь, которые возникают в зубцах ротора и статора. Приблизительное значение добавочных потерь рассчитывается по формуле
Оставшаяся мощность представляет собой полезную мощность на валу двигателя
7. Почему сердечник ротора АД обычно выполняют шихтованным? Для уменьшения потерь энергии на вихревые токи (и вредного нагрева магнитопроводов) и уменьшения эффекта «вытеснения» магнитного потока из ферромагнетиков магнитопроводы машин и аппаратов переменного тока делают не из сплошного куска ферромагнетика (электротехнической стали), а из отдельных пластин, изолированных друг от друга (например, специальным лаком). Такое деление на пластины, расположенные перпендикулярно направлению вихревых токов, ограничивает возможные контуры путей вихревых токов, что сильно уменьшает величину этих токов.
8. Принцип действия двигателя? Выше отмечалось, что трехфазная обмотка статора служит для намагничивания машины или создания так называемого вращающегося магнитного поля двигателя. В основе принципа действия асинхронного двигателя лежит закон электромагнитной индукции. Вращающееся магнитное поле статора пересекает проводники короткозамкнутой обмотки ротора, отчего в последних наводится электродвижущая сила, вызывающая в обмотке ротора протекание переменного тока. Ток ротора создает собственное магнитное поле, взаимодействие его с вращающимся магнитным полем статора приводит к вращению ротора вслед за полями. Наиболее наглядно идею работы асинхронного двигателя иллюстрирует простой опыт, который еще в XVIII веке демонстрировал французский академик Араго (рис. 5). Если подковообразный магнит вращать с постоянной скоростью вблизи металлического диска, свободно расположенного на оси, то диск начнет вращаться вслед за магнитом с некоторой скоростью, меньшей скорости вращения магнита.
9. К каким последствиям приводит увеличение нагрузки на валу АД? В рабочем режиме ротор двигателя вращается с числом оборотов в минуту n2, меньшим числа оборотов n1 магнитного поля статора, вращающегося в том же направлении, что и ротор. Поэтому магнитное поле, имеющее большую скорость, скользит относительно ротора с числом оборотов, равным разности чисел оборотов поля и ротора, т. е.

Относительное отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S.
Скольжение представляет собой отношение числа оборотов магнитного поля статора относительно вращающегося ротора к числу оборотов поля статора в пространстве, т. е.

Эта формула определяет скольжение в относительных единицах. Скольжение может быть также выражено в процентах:

Если ротор неподвижен (n2=0), то скольжение равно единице или 100%.
Если ротор вращается синхронно с магнитным полем, т. е. с одинаковой скоростью (n2=n1), то скольжение равно нулю.
Таким образом, чем больше скорость вращения ротора, тем меньше скольжение.
В рабочем режиме асинхронного двигателя скольжение мало. У современных асинхронных двигателей скольжение при полной нагрузке составляет 3—5%, т. е. ротор вращается с числом оборотов, незначительно отличающимся от числа оборотов магнитного поля статора.
При холостом ходе, т. е. при отсутствии нагрузки на валу, скольжение ничтожно мало и может быть принято равным нулю.
Скорость вращения ротора можно определить из следующих соотношений:

Двигатель будет работать устойчиво с постоянной скоростью вращения ротора при равновесии моментов, т. е. если вращающий момент двигателя Мвр будет равен тормозному моменту на валу двигателя Мтор, который развивает приемник механической энергии, например, резец токарного станка. Следовательно, можно записать:

Любой нагрузке машины соответствует определенное число оборотов ротора т2 и определенное скольжение S.
Магнитное поле статора вращается относительно ротора с числом оборотов n8 и индуктирует в его обмотке э. д. с. Е2, под действием которой по замкнутой обмотке ротора протекает ток силой I2.
Если нагрузка на валу машины увеличилась, т. е. возрос тормозной момент, то равновесие моментов будет нарушено, так как тормозной момент окажется больше вращающего. Это приведет к уменьшению скорости вращения ротора, а следовательно, к увеличению скольжения. С увеличением скольжения магнитное поле статора будет пересекать проводники обмотки ротора чаще, э. д. с. E2, индуктированная в обмотке ротора возрастет, а в силу этого увеличится как сила тока в роторе, так и развиваемый двигателем вращающий момент. Увеличение скольжения и силы тока в ротор; будет происходить до значений, при которых вновь наступит равновесие моментов, т. е. вращающий момент станет равным тормозному.
Так же протекает процесс изменения числа оборотов ротора и развиваемого момента при уменьшении нагрузки двигателя, С уменьшением нагрузки на валу двигателя тормозной момент становится меньше вращающего, что приводит к увеличению скорости вращения ротора или к уменьшению скольжения. В результате уменьшаются э.д. с. и сила тока в обмотке ротора, а следовательно, и вращающий момент, который вновь становится равным тормозному моменту.
Магнитное поле статора пересекает проводники обмотки статора и индуктирует в ней э.д. с. Е1 которая уравновешивает приложенное напряжение сети U1.
Если пренебречь падением напряжения в сопротивлении обмотки статора, которое мало по сравнению с э.д.с, то между абсолютными значениями приложенного напряжения и э. д. с. обмотки статора можно допустить приближенное равенство, т. е.

Таким образом, при неизменном напряжении сети будет неизменна и э.д.с. обмотки статора. Следовательно, магнитный поток в воздушном зазоре машины, так же как в трансформаторе, при любом изменении нагрузки остается постоянным.
Ток обмотки ротора создает свое магнитное поле, которое направлено навстречу магнитному полю, образуемому током обмотки статора. Чтобы результирующий магнитный поток в машине оставался неизмененным при любом изменении нагрузки двигателя, размагничивающее магнитное поле обмотки ротора должно быть уравновешено магнитным полем обмотки статора. Поэтому при увеличении силы тока в обмотке ротора увеличивается и сила тока в обмотке статора.
10) Почему АД создаёт вращающий момент только при некотором скольжении? Как и следовало ожидать, при 5 = 0 вращающий момент исчезает. При s = 00 вращающий момент также обращается в нуль. Таким образом, с увеличением скольжения от нуля вращающий момент увеличивается, достигает максимума, а с дальнейшим возрастанием sдо бесконечности снова стремится к нулю. Задаваясь различными значениями скольжения, можно построить график зависимости М (s), который представлен на рис. 9.13. На графике выделены три момента: номинальный вращающий момент Мн, максимальный момент Л/макс и пусковой момент Мп. Номинальный момент обычно соответствует скольжению s = 3—5%, максимальный момент — 10—14%, пусковой момент — 100%. Обычно асинхронный двигатель рассчитывают так, чтобы максимальный момент в 2—3 раза превышал номинальный, а пусковой момент примерно равнялся номинальному. Небольшое значение пускового момента — один из существенных недостатков асинхронного двигателя.
Максимальный вращающий момент разбивает кривую М (л) на два участка. Участок от 0 до точки А соответствует устойчивым режимам работы асинхронного двигателя; с увеличением момента нагрузки скорость вращения двигателя замедляется, скольжение увеличивается и, как очевидно из графика, возрастает вращающий момент. Новое положение равновесия достигается, когда вращающий момент становится равным тормозному. При этом двигатель устойчиво вращается с уменьшенной скоростью.
Участок за точкой А соответствует неустойчивым режимам работы двигателя: с увеличением момента нагрузки скольжение увеличивается, вращающий момент уменьшается, скольжение возрастает еще больше и т.д. Двигатель останавливается и начинает быстро нагреваться, так как при s = 1 его пусковой ток в 6—7 раз превышает номинальное значение.
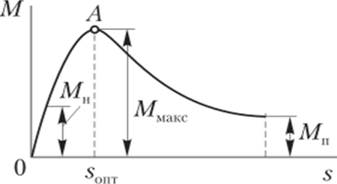
Рис. 9.13
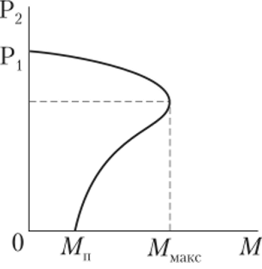
Рис. 9.14
Зависимость скорости вращения двигателя п2 от момента на валу М при постоянном напряжении питания и частоте сети называется механической характеристикой (рис. 9.14). Она может быть снята экспериментально и легко получена на основании графика М (s). С увеличением момента нагрузки скорость вращения двигателя уменьшается незначительно. Если момент нагрузки превысит максимальный момент, то скорость вращения двигателя лавинообразно уменьшится до нуля.
Скорость вращения асинхронного двигателя существенно зависит от напряжения питания. Можно показать, что вращающий момент М пропорционален квадрату напряжения питания. Поэтому даже небольшие колебания напряжения питания приводят к заметному изменению вращающего момента и скорости вращения двигателя.
11) Почему нельзя двигатель, рассчитанный на схему статорной обмотки «звезда» включать по схеме «треугольник»? То есть, напряжение в 220 В подается на «треугольник», 380 В – на «звезду», в противном случае мотор быстро перегорит. Основные технические характеристики агрегата, включая рекомендованную схему подключения и возможность ее изменения отображаются на бирке мотора и его техническом паспорте. Наличие метки вида Δ/Y указывает на возможность соединения обмоток и «звездой», и «треугольником». Чтобы минимизировать потери мощности, неизбежные при работе от однофазных бытовых сетей, мотор такого типа лучше подключать «треугольником».
Знаком Y обозначают двигатели, где возможность подключения в «треугольник» не предусмотрена. В распределительной коробке таких моделей вместо 6 контактов находятся только три, соединение трех других выполнено под корпусом.
Какова схема замещения АД?
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию поэтому на схеме замещения добавляют переменное активное сопротивление r2'(1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн.
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.
Более удобной при практических расчетах является Г-образная схема замещения.
В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения, подводимого к двигателю, к ЭДС статора.
Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Дата: 2019-02-25, просмотров: 373.