9.3.1. Основные характеристики цифровых реле
Цифровые реле обладают всеми достоинствами, достигнутыми с помощью электронных реле с аналоговыми принципами обработки информации. Это более близкий к единице коэффициент возврата измерительных органов (0,96 - 0,97 вместо 0,80 - 0,85 у электромеханических реле), малое потребление мощности от трансформаторов тока и напряжения (на уровне 0,1 - 0,5ВА вместо 10-30ВА у электромеханических реле); при этом электронным реле требуется надежный источник питания. Практически, независимо от числа реализуемых функций, цифровое устройство РЗ потребляет от сети оперативного тока мощность порядка 15 -20Вт,
Собственное время срабатывания измерительных органов цифровых реле осталось практически таким же, как у их электромеханических аналогов. Это можно объяснить тем, что для определения интегральных параметров контролируемых токов и напряжений (действующих значений, фазовых сдвигов) требуется некоторое время.
В реальных сигналах всегда наряду с интересуемой гармоникой присутствуют и другие гармоники и периодические составляющие. Выделение же из сложного сигнала интересующей гармоники требует некоторого времени.
В общем случае, сказанное не распространяется на цифровые реле, в которых не используется определение интегральных параметров сигнала. Например, в дифференциальной токовой защите теоретически можно производить сравнение мгновенных значений токов в ветвях защищаемой схемы. В дифференциальных реле приходится сталкиваться с вопросами фильтрации, которая требуется для подавления помех в рабочих токах и при формировании блокирующих воздействий, например, при бросках тока намагничивания, если речь идет о дифференциальной РЗ трансформатора. Броски тока намагничивания обычно обнаруживают по факту появления второй гармоники в дифференциальном токе.
9.3.2. Фильтрация сигналов в цифровых реле
Цифровые фильтры имеют ряд преимуществ. Основные из них надежность в работе и стабильность характеристик, недостижимые в аналоговых фильтрах. Однако, также как и аналоговые фильтры, цифровые имеют трудности в части точности выделения нужной гармоники из сложенного сигнала и времени, затрачиваемого на фильтрацию.
Качество полосового фильтра характеризуется его частотой пропускания. Сужение полосы пропускания улучшает помехозащищенность реле, так как большинство помех являются импульсными сигналами (грозовые разряды, коммутационные перенапряжения и т.д.), а, следовательно, имеют протяженные спектральные характеристики. При этом, чем уже полоса пропускания входного тракта реле, тем меньшая доля энергии помехи будет добавляться к рабочему сигналу. Однако, слишком узкополосный входной тракт цифрового реле приводит к неприемлемому снижению быстродействия реле. Для повышения быстродействия РЗ лучше применять фильтры меньшей добротности.
Цифровые принципы обработки сигналов эффективно применяются и для обеспечения правильной работы реле при насыщении измерительных ТТ. Очевидно, что вторичный ток насытившегося ТТ существенно отличается от его идеального значения. Однако, известно и то, что даже и случае глубокого насыщения ТТ в отдельные моменты времени трансформация осуществляется правильно,
9.3.3. Защита от перегрузок
Следствием токовой перегрузки установки является чрезмерный нагрев ее активных частей - обмоток, контактных соединений, магнитопровода и т.д. Казалось бы, наиболее простым решением в этом случае будет непосредственный контроль температуры. Однако, системы теплового контроля весьма инерционны из-за необходимости изолировать датчики температуры от токоведущих частей электроустановки. Имеются проблемы и с размещением датчиков, и с передачей сигналов от датчиков к выключателю. Вследствие этого практическое распространение получили РЗ на основе косвенного контроля теплового состояния электрических машин и аппаратов.
Косвенный контроль температуры проводника путем измерения протекающего по нему тока лежит и в основе теплового расцепителя с биметаллической пластиной, и в основе индукционного реле. Однако, механические устройства нестабильны, сложны в производстве и работают с большой погрешностью. Существенный прогресс в этом направлении был достигнут с переходом на электронную элементную базу построения тепловых реле. Впервые в отечественной практике тепловая защита в аналоговом варианте появилась в начале 80-х годов в составе комплектного устройства ЯРЭ2201 (модуль ТО210), Теперь при построении РЗ от перегрузок используют микропроцессоры (МП).
Процесс царева проводника протекающим но нему током хорошо изучен и описан в литературе. Тепло, выделяющееся в единичном проводнике или во всей обмотке, частично отводится в охлаждающую среду, а частично идет на разогрев самого проводника. С достаточной для целей РЗ точностью процесс нагрева может быть описан линейным дифуравнением первого порядка.
Постоянная времени нагрева определяется конструкцией и условиями охлаждения. Например, в электрических машинах условия охлаждения существенно зависят от того, вращается или стоит машина. Так, у остановленного электродвигателя, вследствие ухудшения вентиляции, постоянная времени охлаждения обмотки увеличивается в 1,5 - 2 раза.
Ток перегрузки в общем случае изменяется во времени, а начальная температура существенно зависит от предыдущего режима. Правильным решением будет отслеживание текущего значения температуры обмотки путем непрерывного вычисления интеграла, получаемого из решения дифуравнения первого порядка [5]. Предельная температура, при достижении которой происходит отключение, принимается за 100 %.
Устройство РЗ электродвигателя от перегрузки должно учитывать различные условия пуска. Кроме того, в отключенном состоянии электродвигателя постоянная времени должна автоматически увеличиваться в несколько раз, чтобы учесть ухудшение условий охлаждения обмотки. Па рис. 9.9 приведена функциональная схема защиты от перегрузки.
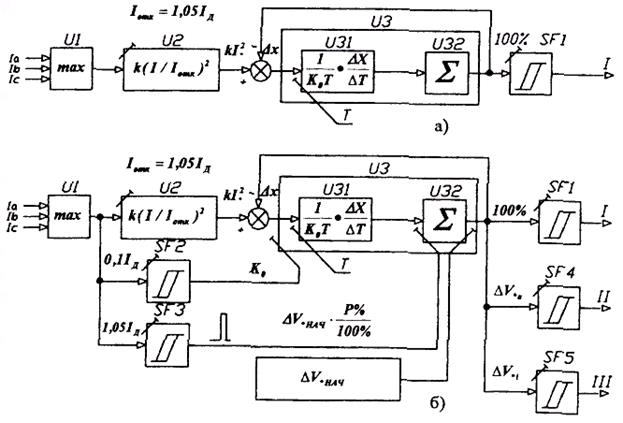
Рис. 9.9. Функциональная схема зашиты от перегрузок: I — отключение, II — предупредительный сигнал; Ш — запрет повторного пуска
При расчете уставок и параметров настройки защиты на основе моделирования процесса нагрева возникают определенные затруднения, Так как моделирование процесса нагрева по дифференциальному уравнению первого порядка дает приближенную картину, то, в общем случае, перегрузочная характеристика объекта защиты и времятоковая характеристика устройства защиты не совпадают.
В рекомендациях по выбору уставок для подобной защиты фирмы АВВ
(реле SРАМ1500) в качестве базисной расчетной точки принимается точка, соответствующая времени нахождения двигателя при шестикратном токе. При любом подходе защита должна быть настроена так, чтобы ее времятоковая характеристика с некоторым запасом проходила ниже перегрузочной характеристики.
9.3.4. Отстройка токовой отсечки от пусковых режимов
Быстродействующие токовые отсечки электродвигателя (или линий с двигательной нагрузкой) приходится существенно загрублять для того, чтобы отстроиться от пусковых токов. При этом режим пуска занимает незначительное время по сравнению с рабочим режимом. Более разумным было бы загрублять защиту на время пуска. Однако, схема выявления режима пуска достаточно сложна, чтобы реализовать ее из отдельных реле, и поэтому этот способ не имел должного распространения. Для цифровых реле это сводится к реализации довольно простых алгоритмов. На рис.9.10 представлено решение, близкое к принятому во многих измерительных модулях цифровых реле фирмы АВВ.
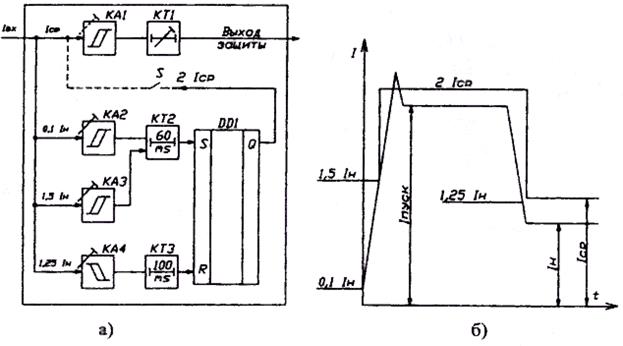
Рис. 9.10. Отстройка отсечки от пусковых токов
В данной схеме токовая отсечка выполнена на измерительных органах КА1 и КТ1.
Наряду с основным токовым органом КА1 в реле дополнительно имеются еще три реле (КА2-КА4) с током срабатывания, близким к 0,1Iн, 1,5 Iн, 1,25 Iн, Здесь Iн - ток нагрузки защищаемой линии в установившемся режиме. Режим пуска обнаруживается по факту нарастания тока от нулевого значения до значения, соответствующего пусковому режиму. Это фиксируется по последовательному срабатыванию токовых органов с уставками 0,1 Iн и 1,5Iн. Если нарастание тока между отмеченными пределами происходит за время не более 60 мс, то элемент времени КТ2 успевает сформировать выходной сигнал до того как он будет заблокирован сигналом от токового органа КАЗ, Выходным сигналом элемента времени КТ2 триггер ОВ1 переводится в состояние, обеспечивающее загрубление уставки основного токового органа КА1 в два раза. По окончании режима пуска ток линии снижается, что приводит к появлению сигнала высокого уровня на выходе токового органа КА4, имеющего уставку 1,25 Iн. В случае формирования им устойчивого сигнала в течение заданного времени (например, 100 мс), на R-входе триггера DD1 появляется си! нал и триггер возвращается в исходное состояние.
В реальных устройствах защиты обычно предоставляется свобода в яыборе данной функции, что достаточно просто сделать, введя в схему программный ключ S.
Дата: 2019-02-25, просмотров: 417.