1. Цель работы
Ознакомление с устройством двигателя постоянного тока (ДПТ), принципом действия и экспериментальное исследование характеристик, а также методами испытания его.
2. Теоретические сведения
Машины (двигатель, генератор) постоянного тока делятся по способу возбуждения на параллельное, последовательное, смешанное и независимое.
Принцип действия ДПТ основан на взаимодействии тока, протекающего в обмотке якоря, и магнитного поля, создаваемого главными полюсами. Это приводит к возникновению электромагнитного момента, который можно определить из выражения:
МЭМ = k М ∙ I Я ∙ Ф
I Я – ток в якоре двигателя; Ф – полезный магнитный поток;
K М – постоянная, зависящая от конструкции двигателя.
При вращении обмотки якоря в магнитном поле в ней индуцируется э.д.с., по величине равная
Е = СЕ ∙ n ∙ Ф,
где СЕ – постоянный коэффициент, n – скорость вращения якоря двигателя.
Эта э.д.с действует против приложенного к якорю напряжения и называется противо-э.д.с.; таким образом, приложенное напряжение уравновешивается противо-э.д.с., а также падением напряжения на якоре
U = E + I Я r Я
Для проверки эксплуатационных свойств ДПТ параллельного возбуждения производят его пуск и опытное исследование характеристик (холостого хода, рабочих и регулировочной характеристик).
3. Методика измерений
3.1. Пуск ДПТ параллельного возбуждения
Поскольку в момент пуска ДПТ скорость вращения якоря равна нулю ( n =0), то и индуцируемая в обмотке якоря э.д.с. Е = 0. Если включить двигатель непосредственно в сеть без добавочного сопротивления, то возникает очень большой пусковой ток в якоре, определяемый как

Поскольку обычно r я мало, то пусковой ток I яп может достичь значений I яп =(10 ÷ 20)∙ I Н, что недопустимо с точки зрения возникновения ударных нагрузок на валу и явления искрений в щеточном механизме. Для уменьшения пускового тока последовательно с якорем включают пусковой реостат, сопротивление которого должно ограничить ток в якоре в момент пуска до значений I яп =(1,3 ÷ 1,7)∙ I Н .
С возрастанием скорости ДПТ пусковой реостат в цепи якоря постепенно выводится, так как возрастает противо-э.д.с., а следовательно, уменьшается ток якоря.
При пуске ДПТ регулировочный реостат в цепи возбуждения должен быть выведен (установить в максимальное значение), чтобы в обмотке возбуждения был максимальный ток, а, следовательно, магнитный поток и пусковой момент.
3.2. Характеристика холостого хода ДПТ параллельного возбуждения
Характеристика холостого хода представляет собой зависимость n = f ( IB ) при U = const (задается преподавателем). Снятие характеристики холостого хода производится при отключенном нагрузочном генераторе, т.е. I НГ = 0. Изменяя ток возбуждения двигателя при помощи реостата RВ, поддерживают U=const при помощи реостата RП и получают интересующую характеристику.
3.3. Рабочие характеристики
Исследование рабочих характеристик М = f ( I я ), n = f ( I я ), η = f ( I я ), Р2= f ( I я ) осуществляется при условиях IB = const и U = const. Для создания нагрузки используют генератор независимого возбуждения. Для вычисления указанных зависимостей рекомендуются следующие выражения:
- мощность, подводимая к двигателю  [Вт]
[Вт]
- полезная мощность на валу двигателя  [Вт]
[Вт]
где Р1Г – полезная мощность генератора, полученная от двигателя;
Р2Г – полезная мощность, отдаваемая генератором;
ηГ – к.п.д. генератора;
U Г – напряжение на зажимах генератора;
I НГ – ток нагрузочного генератора.
Исходя из энергетического баланса следует, что
 2Д = Р1Д ∙ ηД , Р1Д ∙ ηД =
2Д = Р1Д ∙ ηД , Р1Д ∙ ηД =  ,
,
где ηД – к.п.д. исследуемого двигателя.
Поскольку агрегат двигатель-генератор собран из электрических машин одного типа, то можно считать, ηГ = ηД = η . В силу этого для коэффициента полезного действия имеем
η =  .
.
Полезный момент на валу двигателя определяется как
М =  [Нм]
[Нм]
3.4. Регулировочная характеристика
Регулировочная характеристика ДПТ представляет собой зависимость IB = f ( I Я ) при n = const , U = const .
Изменяя нагрузку генератора с помощью нагрузочного реостата RH, реостатом возбуждения RB в цепи двигателя поддерживают постоянной скорость вращения якоря.
4. Программа выполнения работы
4.1. Ознакомиться с конструкцией и паспортными данными двигателя постоянного тока параллельного возбуждения, записать паспортные данные оборудования и приборов.
4.2. Изучить схему лабораторной установки
4.3. Осуществить пуск двигателя
4.4. Снять характеристики холостого хода n = f ( IB ) при U = const. Данные эксперимента занести в таблицу по форме 10.
4.5. Снять рабочие характеристики М = f ( I я ), n = f ( I я ), η = f ( I я ), Р2= f ( I я ) , при и U = const IB = const. Данные эксперимента занести в таблицу по форме 11.
4.6. Снять регулировочные характеристики IB = f ( I Я ) при n = const , U = const Данные эксперимента занести в таблицу по форме 12.
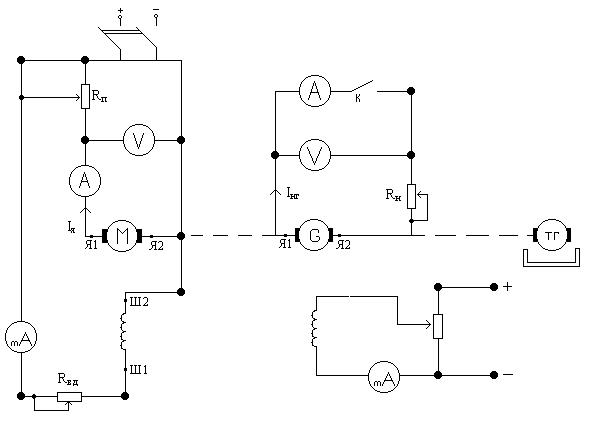
рис.10
28
форма 10
| № п/п | U | n | Iв | Iя |
| В | Об/мин | А | А | |
Форма 11
| № п/п | Измерено | Вычислено | |||||||||
| Iяд | Iвд | Uд | n | Iнг | Iвг | Uг | M2 | P1д | P2д | η | |
| А | А | В | об/мин | А | А | В | Нм | Вт | Вт | % | |
Форма 12
| № п/п | U | Iв | Iя | n |
| В | А | А | об/мин | |
5. Содержание отчета
5.1. Цель и содержание работы
5.2. Перечень приборов и оборудования
5.3. Принципиальная схема установки
5.4. Таблицы экспериментальных данных
5.5. Основные расчетные формулы с числовым примером
5.6. Экспериментальные зависимости рабочих, регулировочных и холостого хода характеристик.
5.7. Выводы по работе
5.8. Дата выполнения. Подпись.
6. Контрольные вопросы
6.1. Пояснить конструктивные особенности ДПТ.
6.2. В чем заключается принцип действия ДПТ?
6.3. Почему при пуске ДПТ возникает большой пусковой ток?
6.4. Как изменить направление вращения ДПТ?
6.5. Для чего реостат в цепи возбуждения ДПТ во время пуска должен быть выведен?
6.6. Каковы способы регулирования скорости ДПТ, их оценка и вид механических характеристик при регулировании?
Литература
1. Герасимов,В.Г. Электротехника: Учебник для неэлектрических спец.вузов.- 3-е изд., перераб. и доп./В.Г.Герасимов. – М.: Высш.шк., 1985. – 480 с., ил.
2. Касаткин, А.С., Электротехника: Учебник для неэлектротехнических спец.вузов. – 8-е изд., /А.С.Касаткин, М.В.Немцов. – М.:Энергоатомиздат, 2003. – 539 с., ил.
3. Вотльдек, А.И. Электрические машины/А.И.Вольдек. – Л.: Энергия, 1978. – 840 с., ил.
4. Робототехника и гибкие автоматизированные производства. В 9-ти кн. Кн.9. Лабораторный практикум по робототехнике: Учебн.пособие для вузов/Под ред.И.М.Макарова. – М.:Высш.шк., 1986. – 176 с., ил.
Содержание
Стр.
Введение……………………………………………………………………… 3
Указания по технике безопасности…………………………………………. 3
Погрешности измерений и обработка результатов измерений…………… 4
Лабораторная работа №5
Исследование режимов однофазного трансформатора…………………………. 8
Лабораторная работа №6
Испытание трехфазного асинхронного двигателя с короткозамкнутым
ротором……………………………………………………………………………..15
Лабораторная работа №7
Исследование генератора постоянного тока независимого и параллель-
ного возбуждения………………………………………………………………….22
Лабораторная работа №8
Исследование двигателя постоянного тока параллельного возбуждения……..27
Литература……………………………………………………………………32
Дата: 2019-02-02, просмотров: 720.