Энергетическая диаграмма двигателя постоянного тока приведена на рис. 3.11.
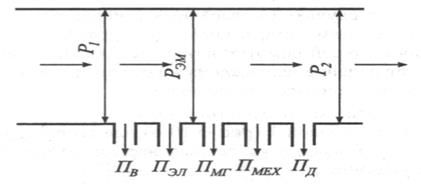
Рис. 3.11. Энергетическая диаграмма двигателя постоянного тока
Входная мощность Р1, передаваемая двигателю из электрической сети, определяется выражением:
 . (3.11)
. (3.11)
Часть этой мощности расходуется на покрытие потерь в обмотке возбуждения Пв = I 2 R в и в цепи якоря Пэл = I 2 R яΣ. Оставшаяся часть, равная электромагнитной мощности за вычетом магнитных потерь Пмг, потерь на трение в подшипниках и вентиляцию Пмех и дополнительных потерь, обеспечивает на валу машины постоянного тока выходную мощность Р2.
Механические характеристики двигателя с независимым
Возбуждением
На основании II закона Кирхгофа для цепей возбуждения и якоря (рис. 3.1), а также учитывая связи, выраженные зависимостями (3.1, 3.2), для установившегося режима можно записать:
 (3.12)
(3.12)
Здесь RяΣ, Rв – суммарное сопротивление якорной цепи и сопротивление обмотки возбуждения.
Под механической характеристикой двигателя принято понимать зависимость его скорости вращения от момента нагрузки ω = f(Μ). Статическую механическую характеристику легко получить из второго и третьего уравнений системы (3.12):
 . (3.13)
. (3.13)
Из уравнения (3.13) следует, что при постоянных напряжении на якоре и потоке скорость машины падает с ростом момента.
Включение в цепь якоря добавочного сопротивления, изменение потока и изменение напряжения изменяют вид механических характеристик. Механические характеристики машины с независимым (параллельным) возбуждением при различных сопротивлениях в якорной цепи показаны на рис. 3.12, а механические характеристики при различных потоках представлены на рис. 3.13, а, а при различных напряжениях на якоре – на рис. 3.13, б.

Рис. 3.12. Виды естественных механических характеристик
(а) и реостатные характеристики (б) двигателя параллельного возбуждения
Вид этих характеристик определяет и область их использования при регулировании скорости вращения двигателя постоянного тока: в области скоростей, меньших номинальной, используется регулирование напряжения на якоре, а в области больших – уменьшение магнитного потока машины.
Увеличение напряжения на якоре для регулирования скорости выше номинальной обычно не используется (исключением являются некоторые типы двигателей краново-металлургических серий, в которых допускается двукратное увеличение якорного напряжения), т.к. оно приводит к значительным коммутационным осложнениям в работе механического коллектора. Увеличение магнитного потока также нецелесообразно, т.к. рабочая точка машины находится на колене кривой намагничивания машины, вблизи участка насыщения.
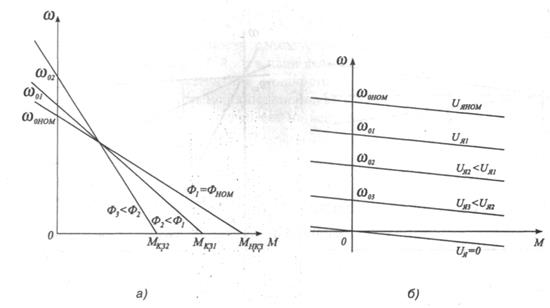
Рис. 3.13. Механические характеристики при различных потоках
(а) и при различных напряжениях на якоре (б)
Регулирование скорости вращения (в сторону ее уменьшения по отношению к номинальной) увеличением сопротивления в цепи якоря в настоящее время используется крайне редко, т.к. резко ухудшает энергетические характеристики электропривода.
Дата: 2019-02-02, просмотров: 420.