Среди задач, связанных с автоматизацией судовых ЭЭУ, особое место занимает задача обеспечения оптимальных режимов загрузки и выбор наиболее эффективных условий работы судовой электростанции. Проведенный анализ состава электростанций и характера нагрузки в различных эксплуатационных режимах, исходя из энергетической эффективности установки, показывает, что наиболее целесообразным является такое решение, когда режим генерирования и распределения электроэнергии неразрывно связан с меняющимся графиком нагрузки, т.е. с режимом потребления электроэнергии. Эти условия диктуют соответствующие требования к судовым ЭЭУ современных крупнотоннажных судов - они должны обеспечивать необходимые эксплуатационные режимы с возможно большей степенью экономичности и бесперебойности питания потребителей электроэнергии.
Указанные требования могут быть выполнены путем сочетания автоматизации управления с наиболее выгодными режимами работы судовой электростанции при изменениях ее нагрузки. Устройство автоматического управления резервом (УВР) предназначено для подачи импульса: на запуск резервного генераторного агрегата. При повышении нагрузки сверх заданной; остановку резервного генераторного агрегата (или сигнала при уменьшении нагрузки ниже заданной); отключение генераторного автомата работающего агрегата и запуск резервного агрегата при длительном снижении или исчезновении напряжения.
Рассматриваемое устройство подключается к генератору трехфазного переменного тока через типовые измерительные трансформаторы напряжения с вторичным напряжением 127 В, частотой 50 Гц и через трансформатор тока на 5 А. Питание устройства УВР (рисунок 5) осуществляется от постороннего источника переменного тока напряжением 127 В, частотой 50 Гц или постоянного тока напряжением 24В. Мощность потребляемая устройством, составляет не более 10 и 15 В•А соответственно от трансформаторов напряжения и тока со стороны генератора и не более 25 В•А со стороны постороннего источника. Для включения резервного генераторного агрегата устройство выполняется для работы по полному или активному току нагрузки и настраивается на полный ток срабатывания в пределах 2.3…5.0 А или на активный ток срабатывания в пределах 1.8…4.0 А. Отключение резервного генераторного агрегата возможно по полному току срабатывания в пределах 1…2.8 А. Точность срабатывания устройства находится в пределах ±5 % от тока у ставки (для устройств, работающих по активному току, при изменении cos ц от 0.6 до 1.0). Срабатывание происходит также при снижении напряжения генератора до 80 ± 5% от номинального и ниже с выдержкой времени 5…8 сек. Коэффициент возврата находится в пределах 0.95…1.0. Допускаются следующие перегрузки устройства по току генератора: 10% в течение 2 ч., 25% в течение 30 мин. и 50% в течение 5 мин. В качестве выходных реле устройства использованы реле типа РМ-4.Конструктивно устройство типа УВР выполнено в корпусе брызгозащищенного исполнения. Все элементы его схемы смонтированы в выдвигающемся блоке, причем расположение элементов обеспечивает открытый доступ к ним и облегчает условия монтажа, а также обслуживание устройства.
Диагностика систем автоматического управления судна.
Одним из основных путей повышения надежности технических систем, широко используемых на практике, является увеличение уровня их безотказности. Это достигается за счет применения более надежных элементов и использования различного вида избыточности. Однако лежащие в основе такого подхода конструктивные, схемные и технологические возможности ограничены, особенно для сложных систем. Хорошие перспективы повышения, как надежности, так и общей эффективности использования объектов различного назначения и любой сложности открываются в направлении совершенствования их технического обслуживания в процессе эксплуатации.
При этом решаются следующие задачи:
1) повышение безотказности за счет своевременного проведения профилактических мероприятий;
2) сокращение эксплуатационных расходов за счет установления оптимального объема и сроков проведения поддерживающих и восстановительных операций;
3) повышение уровня безопасности за счет предотвращения непредвиденных отказов и связанных с ними аварийных ситуаций;
4) постоянное поддержание на оптимальном уровне качества функционирования объекта за счет оперативного устранения дефектов, вызывающих снижение степени его работоспособности.
Для решения этих задач требуется разработка рациональных методов и средств, обеспечивающих достоверную оценку фактического состояния объекта, прогнозирование его изменения и оперативный поиск возможных дефектов, что составляет предмет исследования технической диагностики.
Техническая диагностика представляет собой научную дисциплину, исследующую состояния технических объектов, причины и закономерности их изменения, а также разрабатывающую методы и средства определения технических состояний.
Процесс определения технического состояния называется диагностированием. В общем случае он заключается в проверке объекта на соответствие всем установленным для него техническим требованиям. В период эксплуатации объекта диагностирование проводится с целью установления факта нахождения его в одном из двух возможных состояний - работоспособном или неработоспособном и оценки степени его работоспособности. В этом случае на соответствие техническим требованиям проверяют не все признаки, характеризующие свойства объекта, а лишь некоторое их подмножество - диагностические признаки. Такая проверка обычно базируется на анализе характера реакции объекта на управляющие и возмущающие воздействия во всех возможных режимах его функционирования.
ЗАКЛЮЧЕНИЕ
Помимо технико-экономических выгод, выражающихся в конкретных цифрах. Автоматизация энергетических установок дает значительное число важных косвенных выгод, не поддающихся расчету, например: сосредоточение в рулевой рубке в руках судоводителя всех операций по управлению режимами работы главного двигателя обеспечивает возможность более быстрой и точной отработки принятых решений, что очень важно при маневрировании в сложных навигационных условиях; автоматизация управления и контроля за работой оборудования в значительной степени позволяет исключить ошибки обслуживающего персонала с их возможными последствиями и дает возможность выявить нарушения в работе механизмов и систем в начальной стадии их возникновения, что также существенно повышает надежность и безопасность эксплуатации энергетических установок.
Автоматизация СЭЭС также имеет преимущества. Например, автоматизация электростанции в случае обесточивания сети обеспечивает автоматическое восстановление ее нормальной работы примерно за 25-40 сек., без остановки энергетической установки и потери судном хода. В то время как для выполнения вручную всех операций по пуску ранее работавших механизмов может потребоваться до 30 мин с потерей хода, что в определенных условиях может привести к аварийной обстановке, что особенно не желательно для военных кораблей.
Эксплуатационные преимущества, даваемые автоматизацией, включающие уменьшение износов и нарушений в работе механизмов, в том числе из-за ошибок обслуживающего персонала, по мнению отдельных специалистов, повышают межремонтный период эксплуатации судна на 6-10%.
Список литературы
1. Г. В. Захаров Техническая эксплуатация судовых дизельных установок. – 2015 г.
2. В. В. Медведев. Применение имитационного моделирования для обеспечения надежности и безопасности судовых энергетических установок. 2013 г.-352 с.
3. Александр Прохоренков «Системы управления судовыми энергетическими процессами». Учебник. 2018 г. – 444 с.
4. А. Н. Пипченко, В. В. Пономаренко, А. Е. Савельев, В. А. Шевченко «Судовые автоматизированные тепло- и электроэнергетические установки», - учебное пособие, Одесса: ТЭС, 2011 г. - 394 с.
5. И. В. Возницкий, А. С. Пунда. Судовые двигатели внутреннего сгорания. 2014 г.
Токарев Л.И. Судовые электрические приборы управления
6. Баёв А.С. Судовые энергетические установки и техническая эксплуатация. Монография. С-Пб.: СПбГМТУ, 2015. 397 с
7. О. Белов Судовые электроприводы. Основы теории и динамики переходных процессов. Учебник, 2016 г. 188 с.
8. А.Н. Соболенко, Р.Р. Симашов Судовые энергетические установки: дипломное проектирование. 2015 г.
Приложения
Рисунок. 1. Функциональная схема электропривода
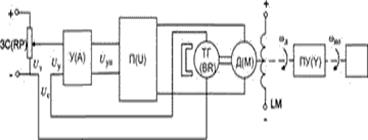
Рисунок 2 - Схема автоматизации СЭС
Рисунок 3 - Функциональная схема синхронизатора УСГ - 1П
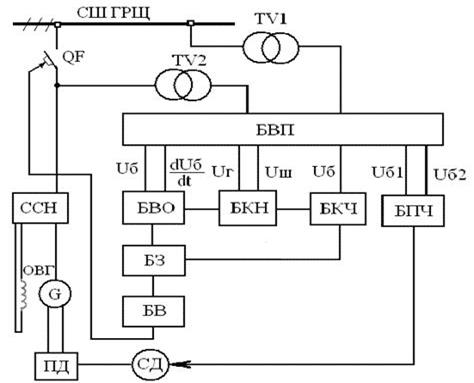
Обозначения принятые в схеме:
БКН - блок контроля напряжения;
БКЧ - блок контроля частоты;
БПЧ - блок подгонки частоты;
БВО - блок времени опережения;
БЗ - блок запрета;
ВБ - выходной блок;
СД - серводвигатель;
БВП - блок входной преобразовательный;
ПД - приводной двигатель.
Рисунок 4 - Схема устройства “Электрон-1” для непрерывного контроля сопротивления изоляции
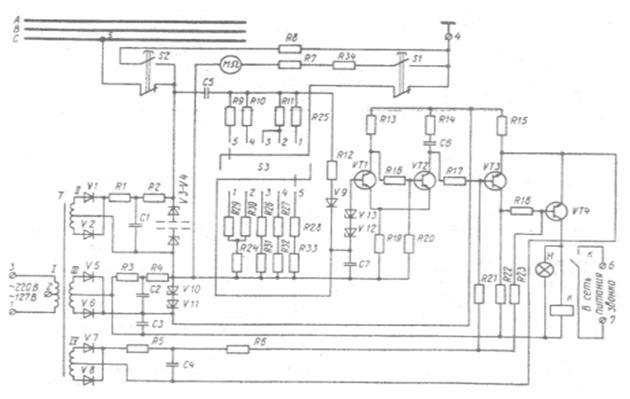
где:
ТV- четырёхобмоточный трансформатор;
К- реле;
S3- переключатель;
S2 - кнопка контроля сигнализации;
S1 -кнопка включения прибора;
VT1 - VT4 - транзисторы;
C1 - C7 - конденсаторы;
R1 - R34 - резисторы;
V1, V2, V5 - V9 - диоды;
V3, V4, V10 - V13 - стабилитроны;
H - сигнальная лампа.
На рисунке 5 - Структурная схема устройства УВР.
ИТ - измеритель активного или полного тока;
РПН - электронное реле повышения нагрузки;
РСН - электронное реле снижение нагрузки; эквивалентная схема замещения
Дата: 2018-12-28, просмотров: 980.