Нефотографические съемочные системы отличаются от фотографических систем тем, что в них для регистрации ЭМИ применяют иные сенсоры и другие способы передачи изображения. Нефотографические системы разработаны с целью расширения технических возможностей аэро- и космических методов изучения земной поверхности.
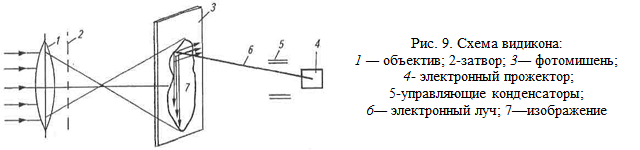 |
В кадровых телевизионных (ТВ) системах по аналогии с кадровыми фотографическими системами изображение строится по закону центральной проекции. Существуют оптическая система, затвор, компенсатор сдвига изображения. Изображение формируется на фотоэлектрической поверхности (фотомишени), являющейся частью приемопередающего устройства — видикона (рис.9).
Фотомишень выполняет функции фотопленки, но в отличие от нее используется многократно.
Полученное изображение транслируется на Землю по радиотелевизионным каналам в режиме реального времени, либо предварительно записывается на магнитный носитель. Если телевизионное изображение вначале строится в фокальной плоскости приемной оптики, то оно соответствует законам центрального проектирования. Если же оно формируется путем линейно-однострочного сканирования, то его геометрия аналогична геометрии сканерных снимков.
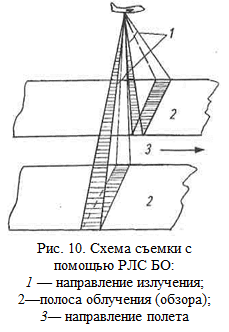 Радиолокационные съемочные системы бокового обзора ( P Л C БО ) формируют изображение путем облучения полос местности (рис. 10), размещенных по обе стороны от оси полета перпендикулярно его направлению, последующего приема отраженных сигналов и их регистрации. Генератор, установленный на борту летательного аппарата, вырабатывает радиоволны определенной длины, амплитуды, поляризации. С помощью антенны радиоизлучение направляется на земную поверхность.
Радиолокационные съемочные системы бокового обзора ( P Л C БО ) формируют изображение путем облучения полос местности (рис. 10), размещенных по обе стороны от оси полета перпендикулярно его направлению, последующего приема отраженных сигналов и их регистрации. Генератор, установленный на борту летательного аппарата, вырабатывает радиоволны определенной длины, амплитуды, поляризации. С помощью антенны радиоизлучение направляется на земную поверхность.
Интенсивность отраженных сигналов соответствует радиояркости соответствующих элементов местности, а фаза определяет наклонную дальность. Развертка изображения в панораму выполняется за счет поступательного движения носителя. Важнейшее преимущество снимков этого класса - их всепогодность. Поскольку радар регистрирует собственное, отраженное земной поверхностью, излучение, для его работы не требуется солнечный свет.
Для облучения местности используются радиоволны 72, 22, 5,6 и 3 см (соответственно Р-, L-, С- и Х-диапазоны). Радиоволны сантиметрового диапазона свободно проходят через сплошную облачность и даже способны проникать на некоторую глубину в почву. Пространственное разрешение сопоставимо с разрешением оптических систем (1 – 100 м).
Лазерные сканирующие системы (лидары ) основаны на использовании полупроводникового лазера БИК диапазона, работающего в импульсном режиме. Одна из возможных схем такой системы предполагает лазерное облучение полосы местности и последующий прием отраженных сигналов, интенсивность которых определяется отражательной способностью объектов местности. Положение локатора в геодезической системе координат (Х, У, Z) определяется бортовым GPS-приемником. В каждом элементарном измерении регистрируется наклонная дальность и значения углов, определяющих направление распространения зондирующего луча в системе координат локатора. Результат съемки – трехмерное цифровое изображение. Точность определения координат зависит от высоты съемки. Например, при использовании системы ALMT-1020 с высоты полета носителя Н = 300 м точность определения плановых координат равна 0,7 м, а высот точек местности — 10...12 см. В настоящее время применение лидаров ограничивается наземным сканированием и сканированием с самолета (Н = 80 – 2000 м).
| Рис. 11 Схема оптико-механического сканера |
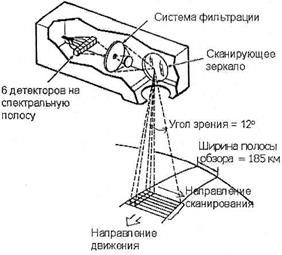 Сканирующие съемочные системы (сканеры) основаны на использовании оптико-механических устройств, представляющих собой быстро качающееся зеркало (около 1000 колебаний в секунду). Попадающие на его поверхность фрагменты изображения местности направляются через зеркальный объектив на точечный приемник, который преобразует лучистую энергию в электрический сигнал. Этот сигнал заносится на магнитный носитель в виде цифрового кода, зависящего от амплитуды сигнала, и в последующем передается на Землю. В многозональных системах поступающий сигнал с помощью системы фильтров разделяется на спектральные каналы с очень узкой полосой (10-30 нм).
Сканирующие съемочные системы (сканеры) основаны на использовании оптико-механических устройств, представляющих собой быстро качающееся зеркало (около 1000 колебаний в секунду). Попадающие на его поверхность фрагменты изображения местности направляются через зеркальный объектив на точечный приемник, который преобразует лучистую энергию в электрический сигнал. Этот сигнал заносится на магнитный носитель в виде цифрового кода, зависящего от амплитуды сигнала, и в последующем передается на Землю. В многозональных системах поступающий сигнал с помощью системы фильтров разделяется на спектральные каналы с очень узкой полосой (10-30 нм).
Сканирующее устройство воспринимает отраженный (излученный) электромагнитный поток от элементарных площадок снимаемого объекта, расположенных вдоль строки. Размер площадки зависит от высоты съемки, мгновенного угла изображения оптической системы сканера и положения относительно оси сканирования. В качестве сканирующих устройств используют вращающиеся оптические элементы: плоские зеркала, зеркальные призмы, пирамиды и т. п.
| Рис. 12 Геометрия сканера с ПЗС-приемниками |
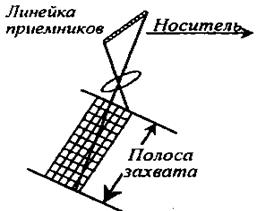 Оптико-электронные съемочные системы получили наибольшее применение, что объясняется простотой их конструкции, отсутствием подвижных элементов и стабильностью, высокой точностью обработки и пр. Приемниками в них служат линейки ПЗС или ПЗС-матрицы. Строка изображения в таких системах формируется одномоментно, с помощью линеек ПЗС, располагающихся в фокальной плоскости приемной оптики перпендикулярно к направлению движения носителя. Сформированная в приемнике строка изображения преобразуется в цифровые сигналы, характеризующие отражательную способность элементов объекта в том или ином диапазоне волн, и запоминается на магнитных устройствах. Несколько тысяч фотоприемников (детекторов) размером в несколько мкм каждый создают строку первичного изображения. Развертка в панораму осуществляется за счет движения носителя съемочной аппаратуры.
Оптико-электронные съемочные системы получили наибольшее применение, что объясняется простотой их конструкции, отсутствием подвижных элементов и стабильностью, высокой точностью обработки и пр. Приемниками в них служат линейки ПЗС или ПЗС-матрицы. Строка изображения в таких системах формируется одномоментно, с помощью линеек ПЗС, располагающихся в фокальной плоскости приемной оптики перпендикулярно к направлению движения носителя. Сформированная в приемнике строка изображения преобразуется в цифровые сигналы, характеризующие отражательную способность элементов объекта в том или ином диапазоне волн, и запоминается на магнитных устройствах. Несколько тысяч фотоприемников (детекторов) размером в несколько мкм каждый создают строку первичного изображения. Развертка в панораму осуществляется за счет движения носителя съемочной аппаратуры.
Линейное разрешение зависит от размеров элементов ПЗС-линейки или ПЗС-матрицы. Их число в современных цифровых съемочных системах достигает 5000 х 5000 элементов и более, что обеспечивает разрешающую способность, близкую к фотопленкам. Различные типы сенсоров имеют различную спектральную чувствительность и охватывают спектральный интервал от видимой до дальней инфракрасной зоны (0,4... 16 мкм). Выбор приемника излучения и его спектральной чувствительности определяется необходимым спектральным интервалом съемки.
В сканерах, как правило, устанавливают несколько сенсоров, позволяющих получать изображение одновременно в различных спектральных каналах.
Тепловые съемочные системы. Принцип получения изображения основан на измерении температур объектов местности. В зависимости от физических и химических свойств снимаемые объекты могут быть «теплее» или «холоднее». Визуализированные результаты измерений температур имеют вид, аналогичный фотографическому изображению местности. Точность регистрации температуры различными системами составляет 0,1...0,005°. Съемку можно выполнять как в дневное время, так и в ночное. Разрешение на местности достигает, при малых высотах съемки Н= 200...300 м, 0,01.-0,12 м.
Изображения, получаемые с помощью тепловых съемочных систем, используют в целях картографирования подземных коммуникаций, выявления техногенных нарушений сооружений (нефте- и газопроводов, теплосетей, зданий и т. п.) и изучении негативных экологических процессов (определение загрязнения почв и водных объектов нефтепродуктами, засоления почв, зон подтопления и т. п.).
Контрольные вопросы:
1. Электромагнитное излучение, используемое при съемках.
2. Что называется рефракцией атмосферы?
3. Какое влияние оказывает атмосфера на результаты съемки.
4. Критерии отражательной способности объектов местности.
5. Формы кривых КСЯ для различных классов объектов.
6. Задачи решаемые с помощью КСЯ и индикатрис рассеяния.
7. Различия активных и пассивных съемочных систем.
8. Основные критерии информационных возможностей съемочных систем.
9. В чем суть понятия линейная разрешающая способность съемочной системы и понятие пространственное разрешение?
10. Сущность понятий спектральная разрешающая способность, фотограмметрическая точность, фотометрическая точность.
11. Назовите основные элементы АФА.
12. Основные характеристики объектива АФА.
13. Перечислите типы нефотографических съемочных систем и их преимущества по сравнению с аэрофотоаппаратами.
14. Какие задачи решают по материалам съемки в тепловом ИК диапазоне?
15. Применение лазерных съемочных систем в интересах лесного хозяйства.
16. В чем преимущества РЛС БО перед оптическими съемочными системами?
Литература:
1. Лабутина, И.А. Дешифрирование аэрокосмических снимков : Учебное пособие [Текст] / И.А. Лабутина. – М.: Аспект Пресс, 2004. – 184 с.
2. Медведев, Е.М. Лазерная локация земли и леса : Учебное пособие [Текст] / Е.М. Медведев, И.М Данилин, С.Р. Мельников. − М.: Геолидар, Геоскосмос; Красноярск: Институт леса им. В.Н. Сукачева СО РАН, 2007. − 230 с.
3. Обиралов, А.И. Фотограмметрия и дистанционное зондирование: Учебник [Текст] / А.И Обиралов, А.Н. Лимонов, Л.А. Гаврилова. – М.: КолосС, 2006. – 334с.
4. Сухих, В.И. Аэрокосмические методы в лесном хозяйстве и ландшафтном строительстве: Учебник [Текст] / В.И. Сухих. – Йошкар-Ола: МарГТУ, 2005. – 392 с.
5. Гарбук, С.В. Космические системы дистанционного зондирования Земли [Текст] / С.В. Гарбук, В.Е. Гершензон. – М.: Издательство А и Б, 1997. – 296 с.
Дата: 2018-12-21, просмотров: 1673.