А.Е. Герман, Г.А. Гачко
Основы автоматизации
Эксперимента
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
Учебно-методическое пособие по курсу
“Основы автоматизации эксперимента”
для студентов физических специальностей
Гродно 2004
УДК 681.58:681.32
ББК 32.842-5
Г38
Рецензенты: ученый секретарь Научно-исследовательского
Центра Проблем ресурсосбережения НАНБ,
кандидат физико-математических наук И.Ф. Свекло;
начальник отдела международных отношений ГрГУ,
кандидат физико-математических наук,
доцент Ю.А. Войтукевич
Рекомендовано Советом физико-технического факультета ГрГУ им. Я. Купалы
Герман А.Е., Гачко Г.А.
| Г38 | Основы автоматизации эксперимента. Лабораторный практикум: Учебно-методическое пособие / А.Е. Герман. – Гродно: ГрГУ, 2004. – 150 с. |
ISBN 985-417-
Пособие предназначено для студентов физических специальностей, изучающих курсы "Основы автоматизации эксперимента" и "Автоматизация физического эксперимента". Приводятся описания пяти лабораторных работ по указанным курсам, включая подробный теоретический материал, задания и методические рекомендации к их выполнению
УДК 681.58:681.32
ББК 32.842-5
ISBN 985-417- © Герман А.Е., Гачко Г.А. , 2004
Учебное издание
Герман Андрей Евгеньевич
Гачко Геннадий Алексеевич
Основы автоматизации эксперимента Лабораторный практикум
Учебно-методическое пособие
Редактор Е.А. Смирнова
Компьютерная верстка: А.Е. Герман
Сдано в набор 28.08.2004. Подписано в печать 29.09.2004.
Формат 60х84/16. Бумага офсетная №1.
Печать RISO. Гарнитура Таймс.
Усл. печ. л. 8,83. Уч.-изд. л.ХХ.
Тираж 120 экз. Заказ ХХ
Отпечатано на технике издательского отдела
Учреждения образования "Гродненский государственный
университет имени Янки Купалы".
 ЛП №111 от 29.12.02. Ул. Пушкина, 39, 230012, Гродно.
ЛП №111 от 29.12.02. Ул. Пушкина, 39, 230012, Гродно.
Одной из наиболее увлекательных и полезных областей применения электроники является сбор и обработка информации об эксперименте. Существует ряд наук, основанных на опыте и неспособных обойтись без него. Одна из таких наук – физика. Экспериментальные методы и измерительная техника в физике в настоящее время весьма разнообразны.
Стремительное развитие электроники оказалось предпосылкой для широкой автоматизации самых различных процессов в научных исследованиях. При этом сигналы от датчиков, в большинстве случаев аналоговые по своей природе, для обработки с помощью микропроцессорных средств должны быть представлены в цифровом виде. Преобразование сигнала из аналоговой в цифровую форму осуществляется с помощью аналого-цифровых преобразователей (АЦП). Получаемый цифровой сигнал вводится в управляющую ЭВМ или микроконтроллер с помощью портов ввода, обрабатывается, и выводится с использованием портов вывода. Обратное преобразование цифрового сигнала в аналоговый осуществляется с помощью цифро-аналоговых преобразователей (ЦАП).
В ряде случаев входные и выходные сигналы управляющей ЭВМ являются цифровыми. Это входные сигналы от дискретных датчиков, работающих по принципу “есть сигнал – нет сигнала”. Выходные цифровые сигналы могут быть использованы для управления включением исполнительных устройств и коммутации различных элементов экспериментальной системы.
Совокупность перечисленных элементов (датчик – АЦП – ЭВМ – ЦАП – исполнительное устройство) в различных комбинациях позволяет создавать системы управления широкого применения, использующиеся и для автоматизации научных исследований.
Предлагаемое читателю учебное пособие содержит описания пяти лабораторных работ по курсу “Основы автоматизации эксперимента” и предназначено для студентов физических специальностей. Первая лабораторная работа посвящена способам цифро-аналогового преобразования. Во второй работе изучаются аналого-цифровые преобразователи, подробно останавливаясь на принципах работы АЦП последовательных приближений. В третьей работе рассмотрены аналоговые ключи на полевых транзисторах, являющиеся неотъемлимым элементом современных систем сбора и обработки аналого-цифровой информации, а также выполненное на их основе устройство выборки-хранения (УВХ) аналоговых сигналов. Шаговые двигатели (ШД) нашли широчайшее применение для управления положением элементов установки в физическом эксперименте и системах автоматизированного управления. Четвертая работа посвящена шаговым двигателям и способам управления ими.
Пятая работа является итоговой, сочетающей в себе основные умения и навыки, полученные при выполнении первых работ. В ходе выполнения пятой работы необходимо из стандартных элементов (таких как монохроматор с ШД, источники света, датчики оптического излучения, АЦП) построить автоматизированный оптический спектрометр, измеряющий спектры поглощения в видимом диапазоне, выполнить его настройку и калибровку, а также получить спектры поглощения неизвестных образцов.
В пособие включено описание принципов организации параллельного интерфейса Centronics (LPT-порта), что позволяет изучить программные методы обмена информацией на низком уровне. Данный интерфейс используется для сопряжения большинства описываемых лабораторных установок с персональным компьютером и выбран исходя из его многофункциональности и простоты программирования. В качестве базового языка программирования при выполнении практикума применяется Паскаль, изучаемый всеми студентами в обязательном порядке.
Каждое описание лабораторной работы начинается с подробного изложения теоретического материала, необходимого для выполнения работы. Далее следует описание и схема лабораторной установки, а также перечень заданий, контрольных вопросов и список литературы, использованной авторами для подготовки работы, также рекомендуемый студентам в качестве дополнительной литературы.
Особенностью изложения заданий практикума является отсутствие подробных “пошаговых” инструкций к их выполнению. Это позволяет развивать творческий подход студентов к выполнению работы, заставляет более глубоко изучать теоретический материал и, в дальнейшем, принимать участие в решении более сложных задач курсового и дипломного проектирования.
Авторы благодарят инженера кафедры общей физики ГрГУ Савицкого В.Б. за помощь в реализации макетов лабораторных работ.

СПОСОБЫ
ЦИФРО-АНАЛОГОВОГО ПРЕОБРАЗОВАНИЯ
| Описание лабораторной установки | |
| Задания к работе | |
| Список контрольных вопросов | |
| Список использованных источников |
Цель Работы:
Изучить основные способы цифро-аналогового преобразования, способы построения цифро-аналоговых преобразователей (ЦАП) и их основные параметры. Освоить принципы программно-управляемого обмена информацией через параллельный порт и реализовать генератор сигналов специальной формы на основе ЦАП.
ОБОРУДОВАНИЕ:
Макет ЦАП, два регулируемых источника питания 0-15В, мультиметр, осциллограф, персональный компьютер, соединительные провода.
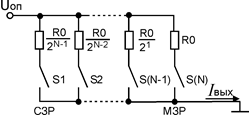
Рис. 1. Простейший ЦАП с суммированием весовых токов
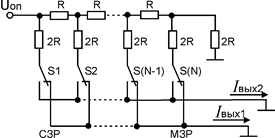
Рис. 2. Схема ЦАП с R-2R матрицей постоянного импеданса
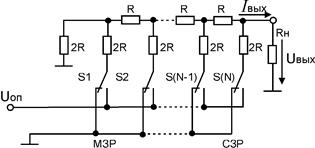
Рис. 3. Схема инверсного включения ЦАП с R-2R матрицей
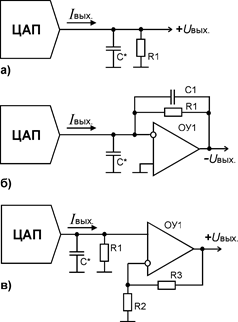
Рис. 1. Формирование напряжения по токовому выходу ЦАП
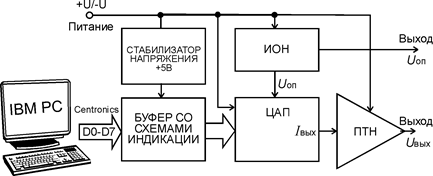
Рис. 9. Структурная схема лабораторной установки по изучению ЦАП
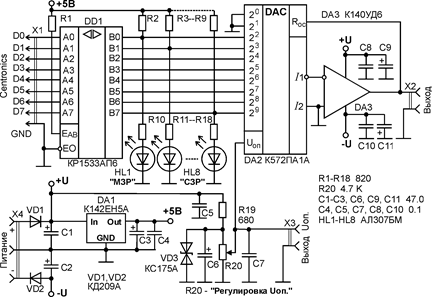
Рис. 10. Принципиальная схема лабораторной
установки по изучению ЦАП

СПОСОБЫ
АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ
| Описание лабораторной установки | |
| Задания к работе | |
| Список контрольных вопросов | |
| Список использованных источников |
Цель Работы:
Изучить основные способы аналого-цифрового преобразования, виды аналого-цифровых преобразователей (АЦП) и их основные параметры. Освоить построение программно управляемых АЦП, работающих по методу последовательных приближений.
ОБОРУДОВАНИЕ:
Макет АЦП последовательных приближений, два регулируемых источника питания 0-15В, мультиметр, осциллограф, персональный компьютер, соединительные провода.
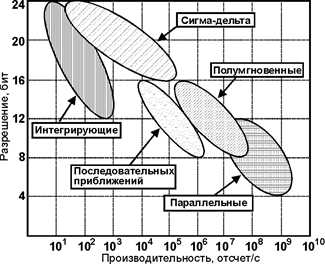
Рис. 1. Сравнение различных видов АЦП по
разрешению и производительности
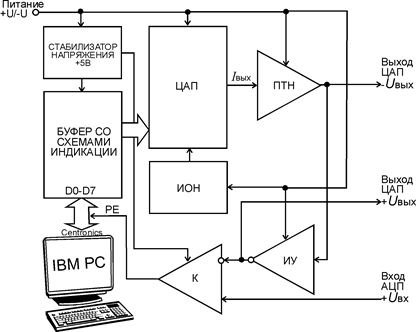
Рис. 9. Структурная схема макета лабораторной установки
по изучению АЦП последовательных приближений
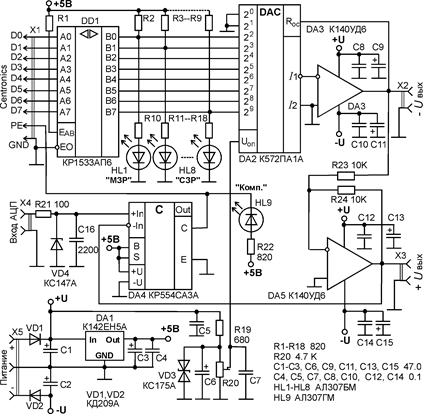
Рис. 10. Принципиальная схема макета лабораторной установки
по изучению АЦП последовательных приближений

АНАЛОГОВЫЕ КЛЮЧИ
УСТРОЙСТВО
ВЫБОРКИ-ХРАНЕНИЯ
| Ключи на полевых транзисторах | 31 |
| Параметры аналоговых ключей | 32 |
| Примеры использования аналоговых ключей | 33 |
| Устройство выборки-хранения | 34 |
| Описание лабораторной установки | 35 |
| Задания к работе | 36 |
| Список контрольных вопросов | 37 |
| Список использованных источников | 38 |
Цель Работы:
Изучить устройство, принцип действия, основные параметры и область применения аналоговых ключей на полевых транзисторах, а также устройство выборки-хранения, построенное на их основе.
ОБОРУДОВАНИЕ:
Макет устройства выборки-хранения, три регулируемых источника питания 0-15В, мультиметр, двухлучевой осциллограф, генератор низкочастотных импульсов, часы-секундомер, набор конденсаторов, соединительные провода.
Параметры АНАЛОГОВЫХ КЛЮЧЕЙ
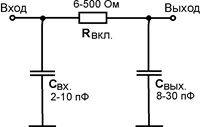
Аналоговые ключи на ПТ имеют сопротивление во включенном состоянии от 6 до 500 Ом, а иногда даже больше. В комбинации с емкостью подложки и паразитными емкостями это сопротивление образует фильтр нижних частот (рис. 6), ограничивающий рабочие частоты значениями порядка 10 МГц и даже ниже. Полевые транзисторы с меньшим Rвкл обычно имеют большую емкость (у некоторых ключей до 50 пФ и более), так что выигрыша в скорости нарастания сигнала они не дают.
|
Рис. 6. Эквивалентная схема аналогового КМОП-ключа в замкнутом состоянии |
Значительная доля ограничения частотной характеристики вызвана элементами защиты – последовательными токоограничивающими резисторами и шунтирующими диодами, присутствующими в структуре КМОП-микросхем. Существуют варианты аналоговых ключей, обеспечивающих пропускание сигналов более высокой частоты, что достигается за счет отказа от некоторых видов защиты. Например, избранные КМОП-ключи оперируют аналоговыми сигналами в обычном диапазоне ±15 В и имеют полосу пропускания 400 МГц.
Сопротивление в открытом (включенном) состоянии. Ключи КМОП, работающие от относительно высокого напряжения питания (скажем, 15 В), будут иметь относительно малые значения Rвкл во всем диапазоне значений сигнала, так как всегда тот или другой проводящий транзистор будет иметь прямое смещение затвора, равное по крайней мере половине напряжения питания (рис. 5). Но при меньшем напряжении питания сопротивление ключа будет расти, и максимум его имеет место при уровне сигнала, среднем между напряжением питания и землей (или между двумя напряжениями питания при двуполярном питании).
При уменьшении напряжения питания сопротивление ПТ во включенном состоянии становится значительно выше, так как для достижения малых значений Rвкл требуется напряжение затвор-исток не меньше чем 5-10 В. Параллельное сопротивление двух ПТ растет при уровне сигнала, среднем между напряжением питания и землей. Пик сопротивления при напряжении входного сигнала, равном половине напряжения источника питания, будет увеличиваться по мере уменьшения напряжения питания. Поэтому при достаточно низком напряжении питания ключ для сигналов с уровнем около половины напряжения питания будет представлять разомкнутую цепь.
Имеются различные приемы, которые разработчики интегральных аналоговых ключей применяют, чтобы сохранить значение Rвкл малым и примерно постоянным во всем диапазоне измерения сигналов. На рис. 7 и 8 представлены типовые зависимости сопротивления во включенном состоянии аналогового ключа от напряжения его источника питания при одно- и двуполярном питании соответственно.
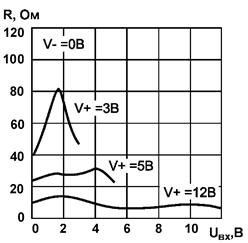
Рис. 7. Зависимость Rвкл типичного серийно выпускаемого ключа от входного напряжения Uвх при однополярном напряжении питания V
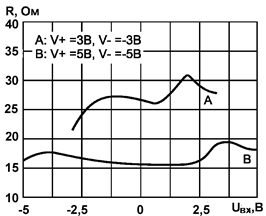
Рис. 8. Зависимость Rвкл типичного серийно выпускаемого ключа от входного напряжения Uвх при двуполярном напряжении питания V
Паразитные ёмкости. Ключи на ПТ обладают следующими паразитными емкостями: между входом и выходом (Сси), между каналом и землей (Сс, Си), между затвором и каналом Cз , между двумя ПТ в пределах одного кристалла (Ссс, Сии); см. рис. 9. Рассмотрим, какие эффекты они вызывают.
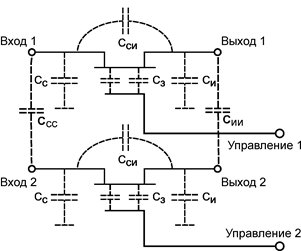
Рис.9. Паразитные ёмкости аналоговых ключей
Сси (емкость сток-исток/вход-выход). Наличие этой емкости приводит к прохождению входного сигнала переменного тока через разомкнутый ключ. В большинстве низкочастотных применений сквозное емкостное прохождение не создает проблем. Если они все-же возникают, наилучшим решением является использование пары каскадно-включенных ключей (рис. 10, а) или, что еще лучше, комбинации из последовательного и шунтирующего ключей, включаемых попеременно (рис. 10, б).
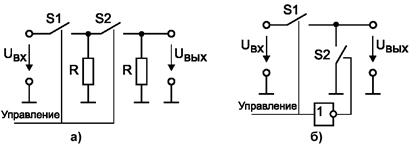
Рис. 10. Использование пары каскадно-включенных ключей (а) и
шунтирующего ключа (б)
Последовательный каскад удваивает ослабление (в децибеллах) ценой дополнительного Rвкл, в то время как последовательно-параллельная схема с шунтирующим ключом уменьшает прямое прохождение, снижая эффективное сопротивление нагрузки до Rвкл, когда последовательный ключ разомкнут.
Однополярные двусторонние КМОП-ключи с управлением, гарантирующим размыкание перед замыканием, выпускаются отдельными модулями. На практике можно встретить несколько таких ключей в одном корпусе. Высокочастотные ключи всегда имеют такую схему.
Сс, Си (емкость стока и истока относительно земли) приводит к спаду частотной характеристики. Ситуация усугубляется при высокоомном источнике сигналов, однако даже при фиксированном сопротивлении источника сопротивление ключа в сочетании с шунтирующей емкостью образует уже упоминавшийся нами фильтр нижних частот (рис. 6).
Емкость затвор-канал (Сз). Емкость между управляющим затвором и каналом вызывает еще один эффект – наводку переходных помех на цепь сигнала при замыкании или размыкании ключа. Скачок управляющего сигнала, поданный на затвор, может создавать емкостную наводку в канале и исказить коммутируемый сигнал до неузнаваемости. Это наиболее серьезно при уровнях входного сигнала, соответствующих высокому сопротивлению ключа. Подобные эффекты возникают и в мультиплексорах во время изменения адреса канала. Кроме этого, в мультиплексоре возможно кратковременное соединение входов через открытые ключи, если задержка выключения канала превосходит задержку включения.
Ссс, Сии (емкость между ключами). Если разместить несколько ключей на одном кристалле размером несколько квадратных миллиметров, то не следует удивляться, заметив наводки между каналами (так называемые перекрестные помехи). Виновницей является емкость между каналами ключей. Эффект усиливается по мере роста частоты и увеличения полного сопротивления источника сигнала, к которому подключен канал. Именно поэтому для большинства широкополосных радиочастотных схем применяются низкоомные источники сигналов, обычно сопротивлением 50 или 75 Ом.
Другие параметры ключей. Вот некоторые дополнительные параметры аналоговых ключей, которые могут быть важными в том или ином применении: время переключения, время установления, задержка размыкания перед замыканием, максимальный ток через канал, ток утечки канала (как в замкнутом, так и в разомкнутом состоянии), согласованность Rвкл между каналами, температурный коэффициент Rвкл, допустимые диапазоны изменения сигнала, напряжение питания и др.
Защита входов. Большинство интегральных КМОП-схем имеют ту или иную схему защиты входа от действия статического электричества, так как в противном случае изоляция затвора легко разрушается при превышении допустимых значений напряжения. Однако необходимо быть осторожными и не подавать на аналоговые входы напряжение, превышающее напряжение питания. Это означает, что мы всегда должны обеспечить подачу напряжения питания прежде, чем поступит какой бы то ни было сигнал, способный вызвать ток значительной величины. Неприятности, связанные с цепями защиты входов и выходов КМОП-схем, состоят в том, что они ухудшают параметры ключа, увеличивая Rвкл, паразитные емкости и приводят к дополнительным утечкам.
ПРИМЕРЫ использования
аналоговых ключеЙ
Аналоговые мультиплексоры. Хорошим применением ключей на ПТ являются мультиплексоры - схемы, которые позволяют выбрать один из нескольких входов по указанию управляющего цифрового сигнала. Аналоговый сигнал с этого выбранного входа будет проходить на единственный выход. На рис. 11 показана функциональная схема такого устройства и его обозначение на принципиальных схемах. Каждый из четырех ключей представляет аналоговый КМОП-ключ. Дешифратор адреса декодирует двоичный адрес и включает только адресованный ключ, блокируя остальные. Вход разрешения Е (рис. 11, б) необходим для наращивания числа коммутируемых сигналов путем объединения выходов нескольких мультиплексоров. Такой мультиплексор обычно используется в сочетании с цифровыми схемами, вырабатывающими адрес.
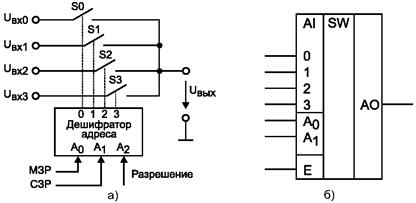
Рис. 11. Устройство мультиплексора на аналоговых ключах (а) и его обозначение на принципиальных схемах (б)
Так как аналоговые ключи являются двунаправленными устройствами, аналоговый мультиплексор является одновременно и демультиплексором, т. е. сигнал может быть подан на выход и снят с избранного входа. Аналоговый мультиплексор может применяться в качестве цифрового мультиплексора-демультиплексора, поскольку цифровые логические уровни – это значения напряжения, воспринимаемые как двоичные единицы и нули.
Типичные отечественные аналоговые мультиплексоры – схемы серий К590КН1-К590КН9, воспринимающие в качестве кода адреса логические уровни ТТЛ и КМОП и работающие с аналоговыми сигналами до 15В. Приборы К561КП1 (КП2), которые входят в семейство цифровых КМОП-схем, являются аналоговыми мультиплексорами-демультиплексорами, имеющими до 8 входов. Предельный уровень коммутируемого сигнала ограничен
15 В. Однако у них есть вывод -U (внутренний уровень смещения), так что их можно использовать для работы с биполярными аналоговыми сигналами и однополярными управляющими сигналами с уровнями цифровых логических схем.
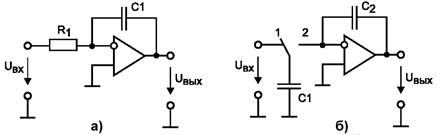
Рис. 12. Схемы интеграторов: а) на RC-цепи,
б) c переключаемыми конденсаторами
В качестве еще одного примера рассмотрим конструкцию интегратора с применением переключаемого конденсатора. На рис. 12, а приведена схема обычного интегратора, а на
рис. 12, б – схема с переключаемым конденсатором. Ключ периодически переключается из положения 1 в положение 2 и обратно с периодом Т. Накопленный конденсатором С1 заряд, пропорциональный входному напряжению и периоду Т, передается на инвертирующий вход операционного усилителя с конденсатором С2 в цепи обратной связи. Поскольку входное дифференциальное напряжение и входные токи идеального операционного усилителя равны нулю, С1 разрядится полностью, и его заряд суммируется с зарядом, накопленным С2. Коммутируемый конденсатор как бы имитирует входной резистор схемы, показанной на
рис. 12, а. Уменьшая период переключения Т, мы уменьшаем эквивалентную постоянную времени интегрирования.
Интегратор на переключаемом конденсаторе имеет ряд преимуществ перед стандартным RC-интегратором. Во-первых, его коэффициент передачи зависит только от соотношения емкостей двух конденсаторов. Это свойство широко используется в микросхемах, содержащих интеграторы: на подложке достаточно просто получить пару однотипных согласованных конденсаторов, в то время как получение разнотипных элементов (резистора и конденсатора) с точными значениями обходится намного дороже, а иногда и вовсе невозможно (например, из-за различных значений температурных коэффициентов емкости и сопротивления). Во-вторых, подстройка интегратора с переключаемым конденсатором осуществляется с помощью изменения тактовой частоты сигнала, управляющего ключом.
Рассматриваемый интегратор не лишен недостатков. При его работе наблюдается сквозное прохождение сигнала тактовой частоты на выход. Однако это редко имеет значение, так как частота тактового сигнала обычно на один-два порядка превышает частоту входных сигналов. Еще одна проблема связана с наложением спектров. Любые компоненты входного сигнала, которые отстоят по частоте от частоты тактового сигнала на величину, соответствующую частотам полосы пропускания интегратора, не будут подавлены. Эта проблема имеет место в случае, когда в спектре входного сигнала есть заметные компоненты частот, близких к тактовой частоте.
Инвертор напряжения с "плавающим" конденсатором. Существует интересный способ (рис. 13) создавать нужное нам напряжение питания отрицательной полярности в схеме, запитанной от однополярного положительного источника питания. Пара левых по схеме ключей подключает С1 к положительному источнику питания, заряжая его до Uвх, в то время как правые ключи разомкнуты. Вслед за тем входные ключи размыкаются, а правая пара ключей замыкается, подключая заряженный C1 к выходу, при этом часть его заряда передается на С2. Схема организована так, что C1 как-бы "переворачивается", выдавая на выход напряжение отрицательной полярности. Данная схема выпускается в виде готовых микросхем конвертера напряжения. Это устройство также называют инвертором напряжения, поскольку оно превращает положительное напряжение в напряжение отрицательное, и наоборот.
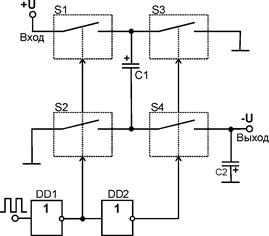
Рис. 13. Инвертор напряжения с "плавающим" конденсатором
Приведенные примеры составляют ничтожно малую часть схем, использующих аналоговые ключи. Одной из наиболее значимых областей применения ключей являются рассматриваемые нами далее устройства выборки-хранения (УВХ).
Устройство выборки-хранения
При сборе аналоговой информации и ее последующем преобразовании бывает необходимо зафиксировать значение аналогового сигнала в определенный момент времени. Некоторые типы аналого-цифровых преобразователей (АЦП) могут давать непредсказуемые ошибки, если их входной сигнал изменяется за время преобразования. При смене входного кода цифро-аналоговых преобразователей (ЦАП) некоторых типов из-за неодновременности установления разрядов наблюдаются флуктуации выходного напряжения. Для устранения этих явлений необходимо зафиксировать значение входного сигнала АЦП и выходного сигнала ЦАП на время преобразования.
Устройства выборки-хранения, выполняющие эту функцию, должны на интервале времени выборки повторять на выходе входной аналоговый сигнал, а при переключении в режим хранения – сохранять последнее значение выходного напряжения до поступления сигнала выборки.
|
Рис. 14. Схема простейшего УВХ (а) и сигналы на его входах и выходах (б) |
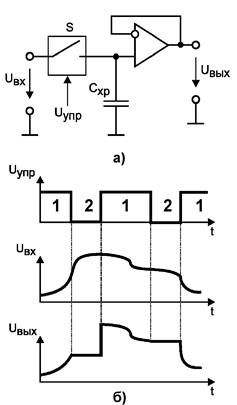
Рис. 14, а демонстрирует, как можно сделать простейшую схему выборки-хранения. Когда ключ S замкнут, выходное напряжение повторяет входное (состояние 1, рис. 14, б). Чтобы запомнить уровень аналогового сигнала в любой заданный момент, вы просто размыкаете ключ (состояние 2). Высокое полное входное сопротивление буфера на основе операционного усилителя (ОУ, у которого на входе должны быть полевые транзисторы, чтобы входной ток не слишком отличался от нуля) предотвращает нагрузку конденсатора Cхр, так что напряжение на нем "хранится" до тех пор, пока ключ не замкнется снова.
Рассмотренная нами схема УВХ имеет ряд принципиальных недостатков. Во-первых, при замкнутом ключе источник сигнала имеет значительную емкостную нагрузку. Во-вторых, операционные усилители с полевыми транзисторами на входе, применяемые в качестве выходных повторителей, имеют значительное смещение нуля.
Рассмотрим подробнее схемотехнику устройства выборки-хранения на примере выполненного в виде интегральной микросхемы УВХ типа К1100СК2, выпускаемой отечественной промышленностью (рис. 15). ОУ1 - это повторитель, предназначенный для формирования низкоомного аналога входного сигнала. Ключ S пропускает сигнал во время выборки и блокирует его прохождение в момент хранения. Конденсатор Схр запоминает сигнал таким, каким он был в момент выключения ключа. ОУ2 - это повторитель с большим входным сопротивлением, благодаря чему минимизируется ток через конденсатор во время хранения. Величина Схр выбирается, исходя из компромисса: ток утечки в ключе, и повторителе вызывает спад напряжения на конденсаторе С во время запоминания в соответствии с выражением dU/dt=I утечки/С.
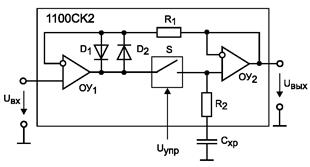
Рис. 15. Функциональная схема промышленно выпускаемой интегральной схемы УВХ К1100СК2
В связи с этим для минимизации спада напряжения конденсатор С должен быть большой емкости. Однако, сопротивление ключа во включенном состоянии образует в сочетании с этим конденсатором фильтр низких частот. В связи с этим Cхр должен быть небольшой емкости, тогда высокочастотные сигналы, проходящие на выход схемы при замкнутом ключе, не будут искажаться.
ОУ1 должен обеспечивать ток заряда конденсатора равный I=C(dU/dt) и должен обладать достаточной скоростью нарастания для повторения входного сигнала. На практике скорость нарастания всей схемы обычно ограничивается выходным током первого ОУ и сопротивлением ключа во включенном состоянии.
ОУ1 управляет емкостной нагрузкой. Поэтому используются операционные усилители, обладающие стабильностью при единичном коэффициенте усиления и большой емкостной нагрузке (до 0,1 мкФ).
Заметьте, что схема на рис. 15 имеет общую отрицательную обратную связь (ООС): с выхода ОУ2 на инвертирующий вход ОУ1. Когда ключ замкнут, потенциал выхода ОУ1, вследствие действия ООС, устанавливается таким, что Uвых отличается от Uвх на величину напряжения смещения ОУ2. При этом смещение, возникающее из-за наличия ключа и ОУ2 компенсируется. Диоды D1 и D2 в этом состоянии заперты, так как напряжение на них, равное указанному смещению, достаточно мало (1-20 мВ).
При размыкании ключа управляющим сигналом выходное напряжение остается неизменным. Резистор R1 и диоды предотвращают насыщение ОУ1, которое могло бы возникнуть из-за разрыва петли ООС в этом режиме. Резистор R2 ограничивает ток заряда конденсатора хранения.
К точностным характеристикам УВХ относится напряжение смещения нуля, определяемое смещением ОУ1 (обычно не очень велико, в пределах 5 мВ, если применяется ОУ с биполярными транзисторами на входе) и дрейф фиксируемого напряжения при заданной емкости конденсатора хранения (для различных УВХ от 10-3 до 10-1 В/c при емкости Cхр=1000 пФ). Величину дрейфа можно уменьшить путем увеличения емкости Cхр. Однако это ухудшает динамические характеристики схемы.
К динамическим характеристикам УВХ относят: время выборки, показывающее как долго при самых неблагоприятных условиях длится процесс заряда конденсатора хранения с заданным уровнем допуска; и апертурную задержку – период между моментом снятия управляющего напряжения и фактическим запиранием ключа.
Существует множество интегральных схем выборки-хранения, обладающих хорошими характеристиками. Ряд схем включает в себя внутренний конденсатор хранения и гарантирует максимальное время выборки в десятки или сотни наносекунд при точности 0,01% для сигнала величиной 10 В. Величина апертурной задержки для популярных УВХ не превышает 100 нс.
Проблемы выбора конденсаторов для построения схем выборки-хранения. Конденсаторам присущи недостатки. Прежде всего это утечка (отличное от бесконечного параллельное сопротивление), последовательное сопротивление и индуктивность, ненулевой температурный коэффициент емкости. Реже вспоминают про диэлектрическое поглощение (ДП) – явление, которое очень сильно проявляет себя в следующей ситуации: возьмем конденсатор большой емкости, заряженный до напряжения в несколько вольт и быстро его разрядим, подключив к выводам резистор сопротивлением в несколько десятков Ом. Удалим резистор и понаблюдаем за напряжением на конденсаторе с помощью вольтметра с большим входным сопротивлением. Напряжение на конденсаторе будет восстанавливаться, и за несколько секунд достигнет примерно 5-10% от величины начального напряжения.
Данное явление недостаточно изучено. Полагают, что оно связано с остаточной поляризацией диэлектрического вещества между обкладками конденсатора. Особенно плохим в этом отношении является такой диэлектрик, как слюда с присущей ей слоистой структурой. С точки зрения схемы добавочная поляризация проявляет себя так, как если бы к выводам конденсатора подключили ряд последовательных RC-цепочек с постоянными времени в диапазоне от микросекунд до нескольких секунд. Этот неприятный эффект может порождать серьезные ошибки в УВХ, интеграторах и других аналоговых схемах, которые рассчитаны на идеальные характеристики конденсаторов.
По свойству ДП диэлектрики конденсаторов существенно отличаются друг от друга. Поэтому конденсаторы нужно выбирать как можно тщательней (с этой точки зрения наилучшим диэлектриком является фторопласт). В особых случаях можно прибегнуть к компенсационным схемам, в которых влияние диэлектрического поглощения электрически устраняют с помощью тщательно настроенных RС-цепочек, включенных в комплекс с запоминающим конденсатором. Этот метод очень сложен в расчете и иногда используется в высококачественных модулях УВХ.
ЗАДАНИЯ К РАБОТЕ
1. Изучите теоретический материал, посвященный аналоговым ключам и областям их использования. Ответьте на контрольные вопросы, приведенные в конце работы.
2. Используя справочную литературу [3, 4], рассмотрите внутреннее устройство и параметры промышленно выпускаемых аналоговых ключей К176КТ1 и К561КТ3, а также мультиплексоров К561КП1 и К561КП2.
3. Изучите электрическую схему макета лабораторной установки и принципы ее работы.
4. Используя справочную литературу [5], проведите анализ типов конденсаторов, выданных преподавателем (в данной работе будут использованы конденсаторы КМ5, КМ6, К10-7В, КСО, МБМ, К73-11, К73-9, К73-17, емкостью 1-68 нФ), и выберите 3 конденсатора, наиболее пригодных по своим характеристикам для использования в качестве запоминающих в схемах УВХ.
5. Подключите макет установки к источнику питания ±15 В. Подайте на вход УВХ постоянное напряжение в несколько вольт. К выходу схемы подключите вольтметр. Экспериментально определите величину входного сопротивления ОУ DA2 на основании измеренного с помощью секундомера времени полного разряда конденсатора хранения C7*. Для управления УВХ используйте ручную подачу управляющего напряжения положительной полярности от источника питания. Эксперимент повторить 3 раза. Результат усреднить.
6. Подключив вместо конденсатора хранения C7* резистор известного сопротивления (1-6,8 кОм), измерьте напряжение на выходе схемы при замкнутом ключе. На основании измеренного напряжения, сопротивления резистора, и напряжения, поданного на вход схемы, определите сопротивление ключа. Повторите эксперимент 3 раза для резисторов разного сопротивления. Усредните полученный результат.
7. Подключите ко входу управления УВХ регулируемый генератор прямоугольных импульсов низкой частоты. Один из входов двухканального осциллографа подключите к выходу генератора, а другой – к выходу УВХ. Определите максимальное время хранения напряжения с точностью 10%, 5%, 1%, 0,5%. Для проведения этого эксперимента на вход УВХ подается постоянное напряжение в несколько вольт. Частота импульсов генератора выбирается таким образом, чтобы спад выходного напряжения, наблюдаемый на экране осциллографа в период хранения, не превысил заданной точности. Период следования импульсов генератора будет являться неизвестным временем. Эксперимент проводится 3 раза для всех отобранных конденсаторов, результаты усредняются.
СПИСОК КОНТРОЛЬНЫХ ВОПРОСОВ
1. Что такое аналоговый ключ?
2. Какие свойства полевых транзисторов делают их пригодными для использования в аналоговых ключах?
3. Объясните принцип работы ключа на ПТ с p-n переходом.
4. Как устроен ключ на одном МОП-транзисторе? Каковы его недостатки?
5. Как формируется итоговое сопротивление КМОП-ключа?
6. От чего зависит максимальная частота сигналов,
коммутируемых аналоговым ключом?
7. Перечислите известные Вам параметры аналоговых ключей.
8. Как влияют на работу ключа паразитные емкости?
9. Какие способы используются для борьбы со сквозным прохождением сигнала через разомкнутый ключ?
10. Где используются аналоговые ключи?
11. Как устроен аналоговый мультиплексор?
12. Объясните принцип работы интегратора с переключаемым конденсатором.
13. Предложите вариант схемы преобразователя с плавающими конденсаторами для положительного входного напряжения,
с выходным положительным напряжением, равным
удвоенному входному.
14. Где применяется устройство выборки-хранения?
15. Как устроено УВХ?
16. Каким образом устраняется влияние напряжения смещения ОУ выходного повторителя УВХ?
17. Какие параметры УВХ Вы знаете?
18. Какие методы могут быть использованы для улучшения этих параметров?
19. Как влияют параметры конденсатора хранения на точностные и динамические параметры УВХ?
УПРАВЛЕНИЕ
ШАГОВЫМИ ДВИГАТЕЛЯМИ
| Шаговые двигатели | 11 |
| Типы шаговых двигателей | 12 |
| Управление фазами | 13 |
| Зависимость момента от скорости. Влияние нагрузки | 14 |
| Питание обмоток шагового двигателя | 15 |
| Описание лабораторной установки | 16 |
| Задания к работе | 17 |
| Список контрольных вопросов | 18 |
| Список использованных источников | 19 |
Цель Работы:
Изучить устройство, принцип действия, основные параметры шаговых двигателей и способы управления их обмотками. Освоить методы программной реализации различных способов управления обмотками шагового двигателя.
ОБОРУДОВАНИЕ:
Устройство управления шаговыми двигателями (контроллер), шаговый двигатель, регулируемый источник питания 0-30В, мультиметр, двухлучевой осциллограф, персональный компьютер, соединительные провода.
шаговыЕ двигателИ
Шаговый двигатель (ШД) – это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Внешне он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов. Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает их исключительно удобными для применения или даже незаменимыми в некоторых областях.
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных к надежности применениях. По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует калибровки с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между обычным и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами выпускаются промышленностью в малых объемах. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт.
Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании, коллекторные двигатели распространены достаточно широко. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
ШД обладают следующими особенностями:
1. Угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
2. Двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны);
3. Прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу;
4. Возможность быстрого старта/остановки/реверсирования;
5. Высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
6. Однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
7. Возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
8. Может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Шаговые двигатели также имеют недостатки:
1. Им присуще явление резонанса;
2. Возможна потеря контроля положения ввиду работы без обратной связи;
3. Потребление энергии не уменьшается даже без нагрузки;
4. Затруднена работа на высоких скоростях;
5. Невысокая удельная мощность;
6. Относительно сложная схема управления.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
1. Двигатели с переменным магнитным сопротивлением;
2. Двигатели с постоянными магнитами;
3. Гибридные двигатели.
Определить тип двигателя можно “на ощупь”: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы со щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Двигатели с переменным магнитным сопротивлением. Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 1). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 градусов.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель нечувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
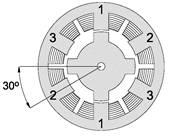
Рис. 1. Двигатель с переменным магнитным сопротивлением
Двигатели с постоянными магнитами. Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 2). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
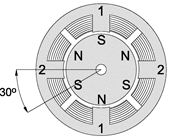
Рис. 2. Двигатель с постоянными магнитами
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 градусов. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 градусов).
Разрез реального шагового двигателя с постоянными магнитами показан на рис. 3.
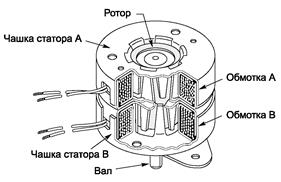
Рис. 3. Разрез шагового двигателя с постоянными магнитами
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость.
Гибридные двигатели. Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 градуса). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 4).
Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок.
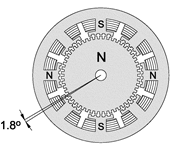
Рис. 4. Гибридный шаговый двигатель
Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 и 8 основных полюсов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага двигателя.
Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1,8 градуса.
Продольное сечение гибридного шагового двигателя показано на рис. 5. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана сплошной черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой черной линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку и поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
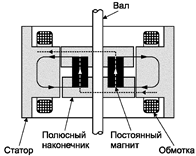
Рис. 5. Продольный разрез гибридного шагового двигателя
Величина зазора между зубцами ротора и статора очень небольшая – обычно около 100 мкм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться. Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Существуют и другие конструкции шаговых двигателей. Например, двигатели с дисковым намагниченным ротором. Такие двигатели имеют малый момент инерции ротора, что в ряде случаев важно.
Большинство современных шаговых двигателей являются гибридными. По сути, такой двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3,6 или 1,8 градуса. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим (см. следующую часть работы).
|
Рис. 6. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в) |
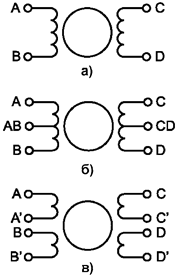
Биполярные и униполярные шаговые двигатели. В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться коммутатором, называемым также драйвером ШД. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двуполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 6, а).
Униполярный двигатель (рис. 6, б) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема коммутатора, который должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 6, в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности ШД.
Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствие потерь в обмотках. Этот факт демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а их сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте около 40%. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками.
УПРАВЛЕНИЕ ФАЗАМИ
Существует несколько способов управления фазами шагового двигателя.
Первый способ обеспечивается попеременной коммутацией фаз, при этом они не перекрываются, а в один момент времени включена только одна фаза (рис 7, а). Этот способ называют “one phase on” full step или wave drive mode (полношаговый режим, включена одна фаза). Точки равновесия ротора для каждого шага совпадают с “естественными” точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.
Второй способ - управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step или просто full step mode (полношаговый режим, включены две фазы или просто – полношаговый режим). При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 7, б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол-шага.
Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 7, в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные коммутаторы реализуют модифицированный полушаговый режим, в котором двигатель
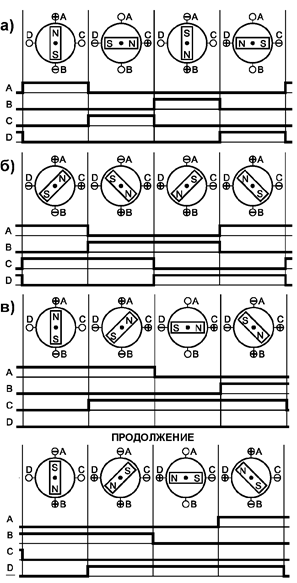
Рис. 7. Различные способы управления фазами шагового двигателя.
а) полношаговый однофазный, б) полношаговый двухфазный,
в) полушаговый.
обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Еще один способ управления называется микрошаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные схемы управления, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания обмоток, поэтому часто реализуется.
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на половину шага. Нужно отметить, что эти положения ротор принимает при работе двигателя, но положение ротора не может сохраняться неизменным после выключения тока обмоток. Поэтому при включении и выключении питания двигателя ротор будет смещаться на пол-шага. Для того, чтобы он не смещался при остановке, необходимо подавать в обмотки ток удержания. То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину.
Ток удержания может быть меньше номинального, так как от двигателя с неподвижным ротором обычно не требуется большого момента. Однако есть применения, когда в остановленном состоянии двигатель должен обеспечивать полный момент, что для шагового двигателя возможно. Это свойство шагового двигателя позволяет в таких ситуациях обходиться без механических тормозных систем. Поскольку современные коммутаторы позволяют регулировать ток питания обмоток двигателя, задание необходимого тока удержания обычно не представляет проблем. Задача обычно заключается просто в соответствующей программной поддержке для управляющего микроконтроллера или ЭВМ.
Полушаговый режим. Основным принципом работы шагового двигателя является создание вращающегося магнитного поля, которое заставляет ротор поворачиваться. Вращающееся магнитное поле создается статором, обмотки которого соответствующим образом запитываются.
Для двигателя, у которого запитана одна обмотка, зависимость момента от угла поворота ротора относительно точки равновесия является приблизительно синусоидальной. Эта зависимость для двухобмоточного двигателя, который имеет N шагов на оборот (угол шага в радианах S = 2 p/N), показана на рис. 8.
Реально характер зависимости может быть несколько другой, что объясняется неидеальностью геометрии ротора и статора.
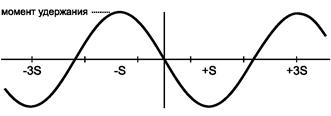
Рис. 8. Зависимость момента от угла поворота ротора для
одной запитанной обмотки
Если к ротору приложить внешний момент, который превышает момент удержания, ротор провернется. Если внешний момент не превышает момента удержания, то ротор будет находится в равновесии в пределах угла шага. Нужно отметить, что у обесточенного двигателя момент удержания не равен нулю вследствие действия постоянных магнитов ротора. Этот момент обычно составляет около 10% максимального момента, обеспечиваемого двигателем.
Иногда используют термины «механический угол поворота ротора» и «электрический угол поворота ротора». Механический угол вычисляется исходя из того, что полный оборот ротора составляет 2 p радиан. При вычислении электрического угла принимается, что один оборот соответствует одному периоду угловой зависимости момента. Электрический угол фактически определяет угол поворота магнитного поля статора.
Если запитать одновременно две обмотки двигателя, то момент будет равен сумме моментов, обеспечиваемых обмотками по отдельности (рис. 9).
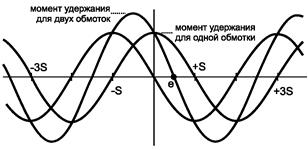
Рис. 9. Зависимость момента от угла поворота ротора
для двух запитанных обмоток
При этом, если токи в обмотках одинаковы, то точка максимума момента будет смещена на половину шага. На половину шага сместится и точка равновесия ротора (точка e на рисунке). Этот факт и положен в основу реализации полушагового режима. Пиковое значение момента (момент удержания) при этом будет в корень из двух раз больше, чем при одной запитанной обмотке. Именно этот момент обычно и указывается в характеристиках шагового двигателя.
Величина и направление магнитного поля показаны на векторной диаграмме (рис. 10).
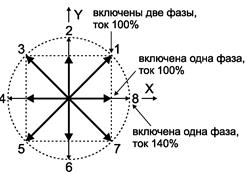
Рис. 10. Величина и направление магнитного поля
для разных режимов питания фаз
Оси X и Y совпадают с направлением магнитного поля, создаваемого обмотками первой и второй фазы двигателя. Когда двигатель работает с одной включенной фазой, ротор может занимать положения 1, 3, 5, 7. Если включены две фазы, то ротор может занимать положения 2, 4, 6, 8. К тому же, в этом режиме больше момент, так как он пропорционален длине вектора на рисунке. Оба эти метода управления обеспечивают полный шаг, но положения равновесия ротора смещены на пол-шага. Если комбинировать два этих метода и подать на обмотки соответствующие последовательности импульсов, то можно заставить ротор последовательно занимать положения 1, 2, 3, 4, 5, 6, 7, 8, что соответствует половинному шагу.
По сравнению с полношаговым режимом, полушаговый режим имеет следующие преимущества: более высокая разрешающая способность без применения более дорогих двигателей; меньшие проблемы с явлением резонанса. Резонанс в таком режиме приводит лишь к частичной потере момента, что обычно не мешает нормальной работе привода.
Недостатком полушагового режима является довольно значительное колебание момента от шага к шагу. В тех положениях ротора, когда запитана одна фаза, момент составляет примерно 70% от полного, когда запитаны две фазы. Эти колебания могут явиться причиной повышенных вибраций и шума, хотя они всё равно остаются меньшими, чем в полношаговом режиме.
Для полушагового режима очень важным является переход в состояние с одной выключенной фазой. Чтобы заставить ротор принять соответствующее положение, ток в отключенной фазе должен быть уменьшен до нуля как можно быстрее. Длительность спада тока зависит от напряжения на обмотке в то время, когда она теряет свою запасенную энергию. Замыкая в это время обмотку может обеспечивается максимально быстрый спад тока.
Микрошаговый режим. Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше.
Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
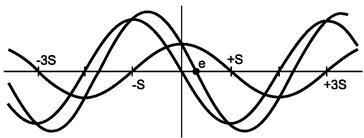
Рис. 11. Зависимость момента от угла поворота ротора в случае
разных значений тока фаз
Смещение точки равновесия ротора е (рис. 11) говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима.
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Для этого токи его фаз должны быть синусоидальными, сдвинутыми друг относительно друга на 90 градусов.
Результатом использования микрошагового режима является намного более плавное вращение ротора на низких частотах. На частотах в 2 – 3 раза выше собственной резонансной частоты ротора и нагрузки, микрошаговый режим дает незначительные преимущества по сравнению с полу- или полношаговым режимами. Причиной этого является фильтрующее действие инерции ротора и нагрузки. Система с шаговым двигателем работает подобно фильтру нижних частот. В микрошаговом режиме можно осуществлять только разгон и торможение, а основное время работать в полношаговом режиме. К тому же, для достижения высоких скоростей в микрошаговом режиме требуется очень высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий контроллер. Для предотвращения переходных процессов и потери шагов, переключения режимов работы двигателя (из микрошагового режима в полношаговый и т.п.) необходимо производить в те моменты, когда ротор находится в положении, соответствующем одной включенной фазе.
Во многих приложениях, где требуются малые относительные перемещения и высокая разрешающая способность, микрошаговый режим способен заменить механический редуктор. Часто простота системы является решающим фактором, даже если при этом придется применить двигатель больших габаритов. Несмотря на то, что коммутатор, обеспечивающий микрошаговый режим, намного сложнее обычного, всё равно система может оказаться более простой и дешевой, чем шаговый двигатель плюс редуктор.
Иногда микрошаговый режим используется для увеличения точности величины шага сверх заявленной производителем двигателя. Для повышения точности используется коррекция положения ротора в точках равновесия. Для этого сначала снимают характеристику конкретного двигателя, а затем, изменяя соотношение токов в фазах, корректируют положение ротора индивидуально для каждого шага. Такой метод требует предварительной калибровки и дополнительных ресурсов управляющего контроллера. Кроме того, требуется датчик начального положения ротора для синхронизации его положения с таблицой корректирующих коэффициентов.
На практике при осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг положения равновесия. Время установления стационарного состояния системы зависит от характеристик нагрузки и от схемы коммутатора. Во многих приложениях такие колебания являются нежелательными. Избавиться от этого явления можно путем использования микрошагового режима. На рис. 12 показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз.
Обычно производители шаговых двигателей указывают такой параметр, как точность шага. Точность шага указывается для положений равновесия ротора при двух включенных фазах, токи которых равны. Это соответствует полношаговому режиму с перекрытием фаз. Для микрошагового режима, когда токи фаз не равны, никаких данных обычно не приводится.
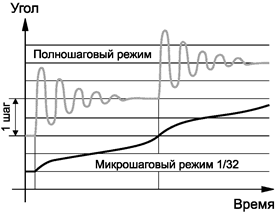
Рис. 12. Перемещения ротора в полношаговом и
микрошаговом режимах
Идеальный шаговый двигатель при питании фаз синусоидальным и косинусоидальным током должен вращаться с постоянной скоростью. У реального двигателя в таком режиме будут наблюдаться некоторые колебания скорости. Связано это с нестабильностью воздушного зазора между полюсами ротора и статора, наличием магнитного гистерезиса, что приводит к погрешностям величины и направления магнитного поля и т.д. Поэтому положения равновесия и момент имеют некоторые отклонения. Эти отклонения зависят от погрешности формы зубцов ротора и статора и от примененного материала магнитопроводов.
Конструкция некоторых двигателей оптимизирована для наилучшей точности в полношаговом режиме и максимального момента удержания. Специальная форма зубцов ротора и статора спроектирована так, чтобы в положении равновесия для полношагового режима магнитный поток сильно возрастал. Это приводит к ухудшению точности в микрошаговом режиме. Лучшие результаты в микрошаговом режиме позволяют получить двигатели, у которых момент удержания в обесточенном состоянии меньше.
Отклонения можно разделить на два вида: отклонения величины магнитного поля, которые приводят к отклонениям момента удержания в микрошаговом режиме и отклонения направления магнитного поля, которые приводят к отклонениям положения равновесия. Отклонения момента удержания в микрошаговом режиме обычно составляют 10 – 30% от максимального момента. Нужно отметить, что и в полношаговом режиме момент удержания может колебаться на 10 – 20 % вследствие неидеальной геометрии ротора и статора.
Если измерить положения равновесия ротора при вращении двигателя по и против часовой стрелки, то получатся несколько разные результаты. Этот гистерезис связан в первую очередь с магнитным гистерезисом материала сердечника, хотя свой вклад вносит и трение. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. Погрешность, создаваемая гистерезисом может быть равна нескольким микрошагам. Поэтому в высокоточных приложениях при движении в одном из направлений нужно проходить за желаемую позицию, а затем возвращаться назад, чтобы подход к нужной позиции всегда осуществлялся в одном направлении.
Естественно, что любое желаемое увеличение разрешающей способности наталкивается на какие-то физические ограничения. Как будет показано ниже, если в системе есть трение, то вследствие появления мертвых зон точность позиционирования будет ограничена.
Большинство коммерческих двигателей не обладают прецизионной конструкцией и зависимость между моментом и углом поворота ротора не является в точности синусоидальной. Вследствие этого зависимость между фазой синусоидального тока питания и углом поворота вала будет нелинейной. В результате ротор двигателя будет точно проходить положения каждого шага и полушага, а между этими положениями будут наблюдаться довольно значительные отклонения.
Эти проблемы наиболее ярко выражены для двигателей с большим количеством полюсов. Существуют двигатели, ещё на этапе разработки оптимизированные для работы в микрошаговом режиме. Полюса ротора и статора таких двигателей менее выражены благодаря специально скошенной форме зубцов.
Иногда контроллеры шаговых двигателей позволяют корректировать форму выходного сигнала путем добавления или вычитания из синуса его третьей гармоники. Однако такая подстройка должна производится индивидуально под конкретный двигатель, характеристики которого должны быть перед этим измерены.
Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения (особенно на очень низких скоростях), для устранения шума и явления резонанса. Микрошаговый режим также способен уменьшить время установления стационарного состояния механической системы, так как в отличие от полношагового режима отсутствуют осцилляции ротора. Однако в большинстве случаев для обычных двигателей нельзя гарантировать точного позиционирования в микрошаговом режиме.
Синусоидальный ток фаз может быть обеспечен применением специальных схем коммутации. Некоторые из них содержат ЦАП и требуют от микроконтроллера или ЭВМ только управляющих цифровых кодов. Другие же требуют внешних опорных напряжений синусоидальной формы, которые должен формировать микроконтроллер или ЭВМ с помощью ЦАП. Нужно сказать, что слишком большое количество дискретов синусоидального сигнала не приводит к повышению точности позиционирования, так как начинает доминировать ошибка, связанная с неидеальностью геометрии полюсов двигателя. Тем более, в этом случае отсчеты должны следовать с большой частотой, что может быть проблемой при их программном формировании. При работе на больших скоростях разрешающую способность ЦАП можно уменьшить.
Более того, при очень больших скоростях вообще рекомендуется работать в обычном полношаговом режиме, так как управление гармоническим сигналом теряет преимущества. Происходит это по причине того, что обмотки двигателя представляют индуктивность, соответственно любая конкретная схема коммутатора обеспечивает вполне определенную максимальную скорость нарастания тока. Из-за этого при повышении частоты управляющих импульсов на обмотках форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной.
ЗАДАНИЯ К РАБОТЕ
1. Изучите теоретический материал, посвященный шаговым двигателям и ответьте на контрольные вопросы, приведенные в конце работы.
2. Изучите устройство и принципы программирования параллельного порта Centronics (см. Приложение). Ответьте на контрольные вопросы, приведенные в конце Приложения.
3. Изучите описание лабораторной установки, ее электрическую схему.
4. Включите лабораторную установку, переведя ее в автономный режим работы (D4=1, кабель интерфейса не подключен к адаптеру LPT-порта компьютера). Напряжение питания установки +15В. С помощью двухлучевого осциллографа исследуйте используемый в автономном режиме способ формирования импульсов на обмотках ШД. На основании изученного теоретического материала охарактеризуйте этот способ. Определите число шагов ШД, требуемое для поворота вала на 360 градусов.
5. Подключите установку к параллельному порту Centronics персонального компьютера. Используя компилятор языка Паскаль напишите программу, реализующую постоянное вращение ШД в полношаговом однофазном режиме со скоростью 5 шагов в секунду по часовой стрелке без разгона.
6. Выполните задание 5, реализуя вращение вала двигателя на заданное пользователем количество шагов в полношаговом двухфазном режиме против часовой стрелки.
7. Напишите программу, выполняющую вращение вала двигателя в полушаговом режиме против часовой стрелки на 100 шагов и затем на 200 шагов в обратном направлении со скоростью 30 шагов в секунду.
8. Напишите универсальную подпрограмму, выполняющую поворот вала ШД на заданное количество шагов с плавным разгоном до заданной скорости в полушаговом режиме, считая, что частота приемистости используемого двигателя равна
50 Гц. Параметры вращения (количество шагов, скорость, направление) задаются в виде параметров подпрограммы.
9. Плавно увеличивая скорость вращения вала ненагруженного и нагруженного ШД, определите резонансные скорости ШД, на которых работа носит неустойчивый характер.
10. Постройте зависимость максимальной скорости вращения (в шагах в секунду) ненагруженного и нагруженного ШД от напряжения источника питания (в пределах 15–24 В). Объясните полученную зависимость.
СПИСОК КОНТРОЛЬНЫХ ВОПРОСОВ
1. Какое устройство называют шаговым двигателем?
2. Где применяются шаговые двигатели?
3. Перечислите достоинства и недостатки ШД.
4. Какие виды шаговых двигателей Вы знаете?
5. Как устроен ШД с переменным магнитным сопротивлением?
6. Как устроен ШД с постоянными магнитами?
7. Какие шаговые двигатели называются гибридными?
8. В чем различие между биполярными и униполярными ШД?
9. Как использовать униполярный ШД в биполярном режиме?
10. Чем определяется момент, создаваемый ШД?
11. Какие способы управления фазами ШД Вам известны?
12. Как реализуется полношаговый режим работы ШД?
13. Как реализуется полушаговый режим работы ШД?
14. Что такое микрошаговый режим работы? В чем его
преимущества и недостатки?
15. Как обеспечить вращение ШД с постоянной скоростью?
16. Что такое мертвые зоны ШД?
17. Чем определяется форма тока в обмотках двигателя?
18. Что такое частота приемистости ШД?
19. Как осуществляется разгон шагового двигателя?
20. Какие причины приводят к возникновению резонанса в шаговых двигателях?
21. Какими средствами необходимо бороться с явлением резонанса в ШД?
22. Как организуется коммутация обмоток униполярного ШД?
23. Как организуется коммутация обмоток биполярного ШД?
24. Какие методы используются для защиты ключей, коммутирующих обмотки ШД, от явления самоиндукции?
ИНТЕРФЕЙС
СПИСОК КОНТРОЛЬНЫХ ВОПРОСОВ
1. Для чего предназначен параллельный интерфейс Centronics?
2. Что представляет собой адаптер LPT-порта?
3. Перечислите основные параметры интерфейса Centronics?
4. Какие основные сигналы используются обсуждаемым
интерфейсом для обеспечения передачи данных от
компьютера к периферийному устройству?
5. Опишите стандартный протокол обмена данными через
интерфейс Centronics.
6. Перечислите режимы обмена данными через LPT-порт
согласно спецификации IEEE 1284.
7. Как осуществляется двунаправленный обмен данными
через LPT-порт?
8. Какими электрическими параметрами обладает LPT-порт,
выполненный согласно спецификации IEEE 1284?
9. Как осуществляется работа с LPT-портом на низком уровне?
10. Какие функции выполняет регистр данных?
11. Перечислите биты регистра состояния стандартного LPT-порта и укажите их назначение.
12. Перечислите биты регистра управления стандартного LPT-порта и укажите их назначение.
13. Как осуществляется программирование регистров интерфейса с использованием языка Паскаль?
Список использованных источников:
1. Гук М. Аппаратные средства IBM PC. Энциклопедия - СПб: Питер Ком, 1999.
2. Е.П. Бененсон, И.М. Витенберг, В.В. Мельников и др.
Печатающие устройства персональных ЭВМ: Справочник / Под ред. И.М. Витенберга. – М.: Радио и связь, 1992.
3. Р. Браун, Дж. Кайл. Справочник по прерываниям IBM PC: В 2-х томах: Т.1. Пер. с англ. –М.: Мир , 1994.
4. Данкан Р. Профессиональная работа в MS-DOS: Пер. с англ.–М.: Мир, 1993.
5. В.Н. Пильщиков. Программирование на языке ассемблера IBM PC. – M.: Диалог – МИФИ, 1997.
6. Фролов А.В., Фролов Г.В. Аппаратное обеспечение IBM PC:
В 2-х ч.: –М.: "Диалог–МИФИ", 1998.
7. Мячев А.А. Интерфейсы средств вычислительной техники: Справочник, –М.: Радио и связь, 1992.

Отчет о выполнении лабораторной работы подготавливается каждым студентом к защите работы и должен содержать следующие обязательные элементы:
1. Личные данные студента, выполнившего работу.
2. Название работы, ее цель, перечень используемого
оборудования.
3. Краткое изложение теоретического материала в виде
ответов на контрольные вопросы, приведенные в конце работы.
4. Схему лабораторной установки с подробным описанием принципов ее работы.
5. Перечень заданий к работе с предполагаемым планом
их выполнения.
6. Отчеты о выполнении всех заданий. Должны включать
все используемые схемы, полученные данные, зарисовки
осциллограмм и листинги написанных программ.
7. Выводы.
Оформление отчета – произвольное. Элементы отчета
№ 1-5 подготавливаются до выполнения работы. Их наличие считается основанием для допуска студента к выполнению
работы.

| Введение | 3 |
| Лабораторная работа №1. Способы цифро-аналогового преобразования | 5 |
| Лабораторная работа №2. Способы аналого-цифрового преобразования | 5 |
| Лабораторная работа №3. Аналоговые ключи. Устройство выборки-хранения | 5 |
| Лабораторная работа №4. Управление шаговыми двигателями | 5 |
| Лабораторная работа №5. Автоматизированный оптический спектрометр | 5 |
| Приложение. Интерфейс Centronics и его программирование | 5 |
| Оформление отчета | 5 |

А.Е. Герман, Г.А. Гачко
Основы автоматизации
Эксперимента
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
Учебно-методическое пособие по курсу
“Основы автоматизации эксперимента”
для студентов физических специальностей
Гродно 2004
УДК 681.58:681.32
ББК 32.842-5
Г38
Рецензенты: ученый секретарь Научно-исследовательского
Центра Проблем ресурсосбережения НАНБ,
кандидат физико-математических наук И.Ф. Свекло;
начальник отдела международных отношений ГрГУ,
кандидат физико-математических наук,
доцент Ю.А. Войтукевич
Рекомендовано Советом физико-технического факультета ГрГУ им. Я. Купалы
Герман А.Е., Гачко Г.А.
| Г38 | Основы автоматизации эксперимента. Лабораторный практикум: Учебно-методическое пособие / А.Е. Герман. – Гродно: ГрГУ, 2004. – 150 с. |
ISBN 985-417-
Пособие предназначено для студентов физических специальностей, изучающих курсы "Основы автоматизации эксперимента" и "Автоматизация физического эксперимента". Приводятся описания пяти лабораторных работ по указанным курсам, включая подробный теоретический материал, задания и методические рекомендации к их выполнению
УДК 681.58:681.32
ББК 32.842-5
ISBN 985-417- © Герман А.Е., Гачко Г.А. , 2004
Учебное издание
Герман Андрей Евгеньевич
Гачко Геннадий Алексеевич
Основы автоматизации эксперимента Лабораторный практикум
Учебно-методическое пособие
Редактор Е.А. Смирнова
Компьютерная верстка: А.Е. Герман
Сдано в набор 28.08.2004. Подписано в печать 29.09.2004.
Формат 60х84/16. Бумага офсетная №1.
Печать RISO. Гарнитура Таймс.
Усл. печ. л. 8,83. Уч.-изд. л.ХХ.
Тираж 120 экз. Заказ ХХ
Отпечатано на технике издательского отдела
Учреждения образования "Гродненский государственный
университет имени Янки Купалы".
ЛП №111 от 29.12.02. Ул. Пушкина, 39, 230012, Гродно.
Одной из наиболее увлекательных и полезных областей применения электроники является сбор и обработка информации об эксперименте. Существует ряд наук, основанных на опыте и неспособных обойтись без него. Одна из таких наук – физика. Экспериментальные методы и измерительная техника в физике в настоящее время весьма разнообразны.
Стремительное развитие электроники оказалось предпосылкой для широкой автоматизации самых различных процессов в научных исследованиях. При этом сигналы от датчиков, в большинстве случаев аналоговые по своей природе, для обработки с помощью микропроцессорных средств должны быть представлены в цифровом виде. Преобразование сигнала из аналоговой в цифровую форму осуществляется с помощью аналого-цифровых преобразователей (АЦП). Получаемый цифровой сигнал вводится в управляющую ЭВМ или микроконтроллер с помощью портов ввода, обрабатывается, и выводится с использованием портов вывода. Обратное преобразование цифрового сигнала в аналоговый осуществляется с помощью цифро-аналоговых преобразователей (ЦАП).
В ряде случаев входные и выходные сигналы управляющей ЭВМ являются цифровыми. Это входные сигналы от дискретных датчиков, работающих по принципу “есть сигнал – нет сигнала”. Выходные цифровые сигналы могут быть использованы для управления включением исполнительных устройств и коммутации различных элементов экспериментальной системы.
Совокупность перечисленных элементов (датчик – АЦП – ЭВМ – ЦАП – исполнительное устройство) в различных комбинациях позволяет создавать системы управления широкого применения, использующиеся и для автоматизации научных исследований.
Предлагаемое читателю учебное пособие содержит описания пяти лабораторных работ по курсу “Основы автоматизации эксперимента” и предназначено для студентов физических специальностей. Первая лабораторная работа посвящена способам цифро-аналогового преобразования. Во второй работе изучаются аналого-цифровые преобразователи, подробно останавливаясь на принципах работы АЦП последовательных приближений. В третьей работе рассмотрены аналоговые ключи на полевых транзисторах, являющиеся неотъемлимым элементом современных систем сбора и обработки аналого-цифровой информации, а также выполненное на их основе устройство выборки-хранения (УВХ) аналоговых сигналов. Шаговые двигатели (ШД) нашли широчайшее применение для управления положением элементов установки в физическом эксперименте и системах автоматизированного управления. Четвертая работа посвящена шаговым двигателям и способам управления ими.
Пятая работа является итоговой, сочетающей в себе основные умения и навыки, полученные при выполнении первых работ. В ходе выполнения пятой работы необходимо из стандартных элементов (таких как монохроматор с ШД, источники света, датчики оптического излучения, АЦП) построить автоматизированный оптический спектрометр, измеряющий спектры поглощения в видимом диапазоне, выполнить его настройку и калибровку, а также получить спектры поглощения неизвестных образцов.
В пособие включено описание принципов организации параллельного интерфейса Centronics (LPT-порта), что позволяет изучить программные методы обмена информацией на низком уровне. Данный интерфейс используется для сопряжения большинства описываемых лабораторных установок с персональным компьютером и выбран исходя из его многофункциональности и простоты программирования. В качестве базового языка программирования при выполнении практикума применяется Паскаль, изучаемый всеми студентами в обязательном порядке.
Каждое описание лабораторной работы начинается с подробного изложения теоретического материала, необходимого для выполнения работы. Далее следует описание и схема лабораторной установки, а также перечень заданий, контрольных вопросов и список литературы, использованной авторами для подготовки работы, также рекомендуемый студентам в качестве дополнительной литературы.
Особенностью изложения заданий практикума является отсутствие подробных “пошаговых” инструкций к их выполнению. Это позволяет развивать творческий подход студентов к выполнению работы, заставляет более глубоко изучать теоретический материал и, в дальнейшем, принимать участие в решении более сложных задач курсового и дипломного проектирования.
Авторы благодарят инженера кафедры общей физики ГрГУ Савицкого В.Б. за помощь в реализации макетов лабораторных работ.
СПОСОБЫ
ЦИФРО-АНАЛОГОВОГО ПРЕОБРАЗОВАНИЯ
| Описание лабораторной установки | |
| Задания к работе | |
| Список контрольных вопросов | |
| Список использованных источников |
Цель Работы:
Изучить основные способы цифро-аналогового преобразования, способы построения цифро-аналоговых преобразователей (ЦАП) и их основные параметры. Освоить принципы программно-управляемого обмена информацией через параллельный порт и реализовать генератор сигналов специальной формы на основе ЦАП.
ОБОРУДОВАНИЕ:
Макет ЦАП, два регулируемых источника питания 0-15В, мультиметр, осциллограф, персональный компьютер, соединительные провода.
Рис. 1. Простейший ЦАП с суммированием весовых токов
Рис. 2. Схема ЦАП с R-2R матрицей постоянного импеданса
Рис. 3. Схема инверсного включения ЦАП с R-2R матрицей
Рис. 1. Формирование напряжения по токовому выходу ЦАП
Рис. 9. Структурная схема лабораторной установки по изучению ЦАП
Рис. 10. Принципиальная схема лабораторной
установки по изучению ЦАП
СПОСОБЫ
АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ
| Описание лабораторной установки | |
| Задания к работе | |
| Список контрольных вопросов | |
| Список использованных источников |
Цель Работы:
Изучить основные способы аналого-цифрового преобразования, виды аналого-цифровых преобразователей (АЦП) и их основные параметры. Освоить построение программно управляемых АЦП, работающих по методу последовательных приближений.
ОБОРУДОВАНИЕ:
Макет АЦП последовательных приближений, два регулируемых источника питания 0-15В, мультиметр, осциллограф, персональный компьютер, соединительные провода.
Рис. 1. Сравнение различных видов АЦП по
разрешению и производительности
Рис. 9. Структурная схема макета лабораторной установки
по изучению АЦП последовательных приближений
Рис. 10. Принципиальная схема макета лабораторной установки
по изучению АЦП последовательных приближений
АНАЛОГОВЫЕ КЛЮЧИ
УСТРОЙСТВО
ВЫБОРКИ-ХРАНЕНИЯ
| Ключи на полевых транзисторах | 31 |
| Параметры аналоговых ключей | 32 |
| Примеры использования аналоговых ключей | 33 |
| Устройство выборки-хранения | 34 |
| Описание лабораторной установки | 35 |
| Задания к работе | 36 |
| Список контрольных вопросов | 37 |
| Список использованных источников | 38 |
Цель Работы:
Изучить устройство, принцип действия, основные параметры и область применения аналоговых ключей на полевых транзисторах, а также устройство выборки-хранения, построенное на их основе.
ОБОРУДОВАНИЕ:
Макет устройства выборки-хранения, три регулируемых источника питания 0-15В, мультиметр, двухлучевой осциллограф, генератор низкочастотных импульсов, часы-секундомер, набор конденсаторов, соединительные провода.
КЛЮЧИ НА ПОЛЕВЫХ ТРАНЗИСТОРАХ
Очень часто полевые транзисторы (ПТ) применяются в качестве аналоговых ключей. В силу таких свойств, как малое сопротивление в проводящем состоянии, крайне высокое сопротивление в состоянии отсечки, малые токи утечки и малая емкость, они являются идеальными ключами, управляемыми напряжением, и предназначенными для аналоговых сигналов.
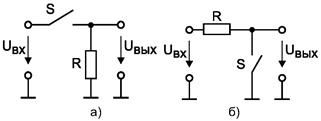
Рис. 1. Последовательная (а) и параллельная (б) схемы ключей
Идеальный последовательный аналоговый ключ (рис. 1, а) ведет себя как совершенный механический выключатель: во включенном состоянии пропускает сигнал Uвх к нагрузке без ослаблений или нелинейных искажений, в выключенном - ведет себя как разомкнутая цепь. Он имеет пренебрежимо малую емкость относительно земли и вносит ничтожно малые наводки в сигнал от переключающего его уровня, приложенного к управляющему входу. В схеме параллельного ключа (рис. 1, б) выходное напряжение равно входному при разомкнутом ключе. В этой схеме сопротивление R используется для ограничения тока, протекающего через замкнутый ключ.
Известно, что ПТ в области малых напряжений сток-исток ведет себя как резистор, сопротивление которого может изменяться на много порядков при изменении управляющего напряжения затвор-исток. На рис. 2, а показана схема аналогового ключа на ПТ с управляющим p-n переходом. Если для этой схемы управляющее напряжение Uупр установить меньше, чем минимально возможное входное напряжение, по крайней мере, на величину порогового напряжения ПТ - транзистор закроется, и выходное напряжение станет нулевым.
|
Рис. 2. Аналоговый ключ на ПТ с p-n переходом |
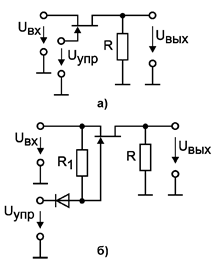
Для того, чтобы ПТ был открыт, напряжение затвор-исток следует поддерживать равным нулю, обеспечивая тем самым минимальное сопротивление канала сток-исток. Если это напряжение вдруг окажется большим нуля, управляющий p-n переход откроется и выход ключа окажется соединенным с цепью управления. Равенство нулю напряжения затвор-исток реализовать достаточно сложно, так как потенциал истока изменяется с изменением входного потенциала. Способ преодоления этой проблемы показан на рис. 2, б.
Если напряжение Uупр установить большим, чем входное напряжение, диод закроется и напряжение затвор-исток будет равным нулю. При достаточно большом отрицательном управляющем напряжении диод будет открыт, а ПТ закрыт. В этом режиме ток через резистор R1 течет в цепь управляющего сигнала.
|
Рис. 3. Схема ключа на МОП-транзисторе |
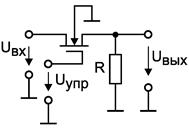
Описанная проблема не имеет места при использовании в качестве ключа ПТ с изолированным затвором (МОП-транзистора). Его можно переводить в открытое состояние, подавая на затвор управляющее напряжение, большее чем максимальное входное напряжение, причем ток затвора будет равен нулю (рис. 3). В этой схеме отпадает необходимость использования R1 и диода, как на рис. 2.
Показанный на рис. 3 n-канальный МОП-транзистор обогащенного типа, не проводящий ток при заземленном затворе или при отрицательном напряжении затвора. В этом состоянии сопротивление сток-исток (Rвыкл) как правило, больше 10 ГОм, и сигнал не проходит через ключ (хотя на высоких частотах будут некоторые наводки через емкость сток-исток, рассмотренные нами далее). Подача на затвор значительного положительного напряжения относительно истока приводит канал сток-исток в проводящее состояние с типичным сопротивлением от 6 до 500 Ом (Rвкл) для ПТ, используемых в качестве аналоговых ключей.
Схема, показанная на рис. 3, будет работать при входных сигналах, которые по крайней мере на 5 В меньше, чем Uупр. При более высоком уровне входного сигнала напряжение затвор-исток будет недостаточным для поддержания ПТ в открытом состоянии, а отрицательные входные сигналы вызовут включение ключа даже при заземленном затворе (при этом появится прямое смещение перехода канал-подложка). Если надо переключать сигналы обеих полярностей (например, в диапазоне от -10 до +10 В), то можно применить такую же схему, но с затвором, управляемым напряжением -15 В (ВЫКЛ) и +15 В (ВКЛ); подложка ПТ при этом должна быть подсоединена к напряжению -15В.
Для любого ключа на ПТ сопротивление нагрузки должно быть не слишком высоким, чтобы предотвратить емкостное прохождение входного сигнала в разомкнутом состоянии, которое имело бы место при большом сопротивлении. Сопротивление нагрузки выбирается компромиссным. Малое сопротивление уменьшит емкостную утечку, но вызовет ослабление входного сигнала из-за делителя напряжения, образованного сопротивлением проводящего ПТ Rвкл и сопротивлением нагрузки. Так как Rвкл меняется с изменением входного сигнала (при изменении напряжения затвор-исток), это ослабление приведет к некоторой нежелательной нелинейности. Слишком низкое сопротивление нагрузки проявляется также и на входе ключа, нагружая источник входного сигнала.
Часто необходимо переключать сигналы, сравнимые по величине с напряжением питания. В этом случае описанная выше простая схема (рис. 3) работать не будет, поскольку при пиковом значении сигнала затвор не будет иметь смещения в прямом направлении. Переключение таких сигналов обеспечивают переключатели на комплементарных МОП-транзисторах (КМОП, рис. 4). Здесь на подложку VT1 подается положительное напряжение питания +U, а на подложку VT2 отрицательное напряжение -U. При высоком уровне (лог. 1) управляющего сигнала VT1 пропускает сигналы с уровнями от -U до U минус несколько вольт (при
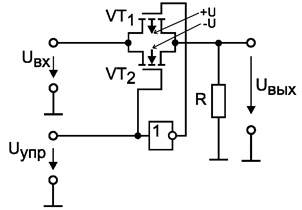
Рис. 4. Ключ на комплементарных МОП-транзисторах
|
Рис. 5. Зависимость сопротивления ключа на КМОП транзисторах от входного напряжения
|
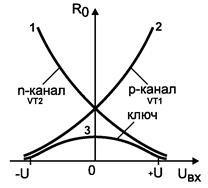
более высоких уровнях сигнала Rвкл начинает сильно расти). Аналогично VТ2 при заземленном затворе (на входе управления лог. 0) пропускает сигнал с уровнями от U до значения на несколько вольт выше уровня -U.
Таким образом, все сигналы в диапазоне от -U до U проходят через схему с малым сопротивлением (рис. 5). Переключение управляющего сигнала на уровень земли запирает оба ПТ, размыкая цепь. В результате получается аналоговый переключатель для сигналов в диапазоне от -U до U. Это основа схемы большинства КМОП-ключей. Эта схема работает в двух направлениях - любой ее зажим может служить входным.
Выпускается большое количество интегральных КМОП-ключей в разных конфигурациях (например, несколько секций с несколькими полюсами каждая). Многие интегральные ключи очень удобны в употреблении. Они используют управляющий сигнал с уровнями ТТЛ, оперируют аналоговыми сигналами до ±15 В и имеют малое сопротивление (у некоторых – до 6 Ом). Типичными примерами отечественных микросхем аналоговых ключей являются микросхемы К176КТ1, К561КТ3 и ряд других.
Параметры АНАЛОГОВЫХ КЛЮЧЕЙ
Аналоговые ключи на ПТ имеют сопротивление во включенном состоянии от 6 до 500 Ом, а иногда даже больше. В комбинации с емкостью подложки и паразитными емкостями это сопротивление образует фильтр нижних частот (рис. 6), ограничивающий рабочие частоты значениями порядка 10 МГц и даже ниже. Полевые транзисторы с меньшим Rвкл обычно имеют большую емкость (у некоторых ключей до 50 пФ и более), так что выигрыша в скорости нарастания сигнала они не дают.
|
Рис. 6. Эквивалентная схема аналогового КМОП-ключа в замкнутом состоянии |
Значительная доля ограничения частотной характеристики вызвана элементами защиты – последовательными токоограничивающими резисторами и шунтирующими диодами, присутствующими в структуре КМОП-микросхем. Существуют варианты аналоговых ключей, обеспечивающих пропускание сигналов более высокой частоты, что достигается за счет отказа от некоторых видов защиты. Например, избранные КМОП-ключи оперируют аналоговыми сигналами в обычном диапазоне ±15 В и имеют полосу пропускания 400 МГц.
Сопротивление в открытом (включенном) состоянии. Ключи КМОП, работающие от относительно высокого напряжения питания (скажем, 15 В), будут иметь относительно малые значения Rвкл во всем диапазоне значений сигнала, так как всегда тот или другой проводящий транзистор будет иметь прямое смещение затвора, равное по крайней мере половине напряжения питания (рис. 5). Но при меньшем напряжении питания сопротивление ключа будет расти, и максимум его имеет место при уровне сигнала, среднем между напряжением питания и землей (или между двумя напряжениями питания при двуполярном питании).
При уменьшении напряжения питания сопротивление ПТ во включенном состоянии становится значительно выше, так как для достижения малых значений Rвкл требуется напряжение затвор-исток не меньше чем 5-10 В. Параллельное сопротивление двух ПТ растет при уровне сигнала, среднем между напряжением питания и землей. Пик сопротивления при напряжении входного сигнала, равном половине напряжения источника питания, будет увеличиваться по мере уменьшения напряжения питания. Поэтому при достаточно низком напряжении питания ключ для сигналов с уровнем около половины напряжения питания будет представлять разомкнутую цепь.
Имеются различные приемы, которые разработчики интегральных аналоговых ключей применяют, чтобы сохранить значение Rвкл малым и примерно постоянным во всем диапазоне измерения сигналов. На рис. 7 и 8 представлены типовые зависимости сопротивления во включенном состоянии аналогового ключа от напряжения его источника питания при одно- и двуполярном питании соответственно.
Рис. 7. Зависимость Rвкл типичного серийно выпускаемого ключа от входного напряжения Uвх при однополярном напряжении питания V
Рис. 8. Зависимость Rвкл типичного серийно выпускаемого ключа от входного напряжения Uвх при двуполярном напряжении питания V
Паразитные ёмкости. Ключи на ПТ обладают следующими паразитными емкостями: между входом и выходом (Сси), между каналом и землей (Сс, Си), между затвором и каналом Cз , между двумя ПТ в пределах одного кристалла (Ссс, Сии); см. рис. 9. Рассмотрим, какие эффекты они вызывают.
Рис.9. Паразитные ёмкости аналоговых ключей
Сси (емкость сток-исток/вход-выход). Наличие этой емкости приводит к прохождению входного сигнала переменного тока через разомкнутый ключ. В большинстве низкочастотных применений сквозное емкостное прохождение не создает проблем. Если они все-же возникают, наилучшим решением является использование пары каскадно-включенных ключей (рис. 10, а) или, что еще лучше, комбинации из последовательного и шунтирующего ключей, включаемых попеременно (рис. 10, б).
Рис. 10. Использование пары каскадно-включенных ключей (а) и
шунтирующего ключа (б)
Последовательный каскад удваивает ослабление (в децибеллах) ценой дополнительного Rвкл, в то время как последовательно-параллельная схема с шунтирующим ключом уменьшает прямое прохождение, снижая эффективное сопротивление нагрузки до Rвкл, когда последовательный ключ разомкнут.
Однополярные двусторонние КМОП-ключи с управлением, гарантирующим размыкание перед замыканием, выпускаются отдельными модулями. На практике можно встретить несколько таких ключей в одном корпусе. Высокочастотные ключи всегда имеют такую схему.
Сс, Си (емкость стока и истока относительно земли) приводит к спаду частотной характеристики. Ситуация усугубляется при высокоомном источнике сигналов, однако даже при фиксированном сопротивлении источника сопротивление ключа в сочетании с шунтирующей емкостью образует уже упоминавшийся нами фильтр нижних частот (рис. 6).
Емкость затвор-канал (Сз). Емкость между управляющим затвором и каналом вызывает еще один эффект – наводку переходных помех на цепь сигнала при замыкании или размыкании ключа. Скачок управляющего сигнала, поданный на затвор, может создавать емкостную наводку в канале и исказить коммутируемый сигнал до неузнаваемости. Это наиболее серьезно при уровнях входного сигнала, соответствующих высокому сопротивлению ключа. Подобные эффекты возникают и в мультиплексорах во время изменения адреса канала. Кроме этого, в мультиплексоре возможно кратковременное соединение входов через открытые ключи, если задержка выключения канала превосходит задержку включения.
Ссс, Сии (емкость между ключами). Если разместить несколько ключей на одном кристалле размером несколько квадратных миллиметров, то не следует удивляться, заметив наводки между каналами (так называемые перекрестные помехи). Виновницей является емкость между каналами ключей. Эффект усиливается по мере роста частоты и увеличения полного сопротивления источника сигнала, к которому подключен канал. Именно поэтому для большинства широкополосных радиочастотных схем применяются низкоомные источники сигналов, обычно сопротивлением 50 или 75 Ом.
Другие параметры ключей. Вот некоторые дополнительные параметры аналоговых ключей, которые могут быть важными в том или ином применении: время переключения, время установления, задержка размыкания перед замыканием, максимальный ток через канал, ток утечки канала (как в замкнутом, так и в разомкнутом состоянии), согласованность Rвкл между каналами, температурный коэффициент Rвкл, допустимые диапазоны изменения сигнала, напряжение питания и др.
Защита входов. Большинство интегральных КМОП-схем имеют ту или иную схему защиты входа от действия статического электричества, так как в противном случае изоляция затвора легко разрушается при превышении допустимых значений напряжения. Однако необходимо быть осторожными и не подавать на аналоговые входы напряжение, превышающее напряжение питания. Это означает, что мы всегда должны обеспечить подачу напряжения питания прежде, чем поступит какой бы то ни было сигнал, способный вызвать ток значительной величины. Неприятности, связанные с цепями защиты входов и выходов КМОП-схем, состоят в том, что они ухудшают параметры ключа, увеличивая Rвкл, паразитные емкости и приводят к дополнительным утечкам.
ПРИМЕРЫ использования
аналоговых ключеЙ
Аналоговые мультиплексоры. Хорошим применением ключей на ПТ являются мультиплексоры - схемы, которые позволяют выбрать один из нескольких входов по указанию управляющего цифрового сигнала. Аналоговый сигнал с этого выбранного входа будет проходить на единственный выход. На рис. 11 показана функциональная схема такого устройства и его обозначение на принципиальных схемах. Каждый из четырех ключей представляет аналоговый КМОП-ключ. Дешифратор адреса декодирует двоичный адрес и включает только адресованный ключ, блокируя остальные. Вход разрешения Е (рис. 11, б) необходим для наращивания числа коммутируемых сигналов путем объединения выходов нескольких мультиплексоров. Такой мультиплексор обычно используется в сочетании с цифровыми схемами, вырабатывающими адрес.
Рис. 11. Устройство мультиплексора на аналоговых ключах (а) и его обозначение на принципиальных схемах (б)
Так как аналоговые ключи являются двунаправленными устройствами, аналоговый мультиплексор является одновременно и демультиплексором, т. е. сигнал может быть подан на выход и снят с избранного входа. Аналоговый мультиплексор может применяться в качестве цифрового мультиплексора-демультиплексора, поскольку цифровые логические уровни – это значения напряжения, воспринимаемые как двоичные единицы и нули.
Типичные отечественные аналоговые мультиплексоры – схемы серий К590КН1-К590КН9, воспринимающие в качестве кода адреса логические уровни ТТЛ и КМОП и работающие с аналоговыми сигналами до 15В. Приборы К561КП1 (КП2), которые входят в семейство цифровых КМОП-схем, являются аналоговыми мультиплексорами-демультиплексорами, имеющими до 8 входов. Предельный уровень коммутируемого сигнала ограничен
15 В. Однако у них есть вывод -U (внутренний уровень смещения), так что их можно использовать для работы с биполярными аналоговыми сигналами и однополярными управляющими сигналами с уровнями цифровых логических схем.
Рис. 12. Схемы интеграторов: а) на RC-цепи,
б) c переключаемыми конденсаторами
В качестве еще одного примера рассмотрим конструкцию интегратора с применением переключаемого конденсатора. На рис. 12, а приведена схема обычного интегратора, а на
рис. 12, б – схема с переключаемым конденсатором. Ключ периодически переключается из положения 1 в положение 2 и обратно с периодом Т. Накопленный конденсатором С1 заряд, пропорциональный входному напряжению и периоду Т, передается на инвертирующий вход операционного усилителя с конденсатором С2 в цепи обратной связи. Поскольку входное дифференциальное напряжение и входные токи идеального операционного усилителя равны нулю, С1 разрядится полностью, и его заряд суммируется с зарядом, накопленным С2. Коммутируемый конденсатор как бы имитирует входной резистор схемы, показанной на
рис. 12, а. Уменьшая период переключения Т, мы уменьшаем эквивалентную постоянную времени интегрирования.
Интегратор на переключаемом конденсаторе имеет ряд преимуществ перед стандартным RC-интегратором. Во-первых, его коэффициент передачи зависит только от соотношения емкостей двух конденсаторов. Это свойство широко используется в микросхемах, содержащих интеграторы: на подложке достаточно просто получить пару однотипных согласованных конденсаторов, в то время как получение разнотипных элементов (резистора и конденсатора) с точными значениями обходится намного дороже, а иногда и вовсе невозможно (например, из-за различных значений температурных коэффициентов емкости и сопротивления). Во-вторых, подстройка интегратора с переключаемым конденсатором осуществляется с помощью изменения тактовой частоты сигнала, управляющего ключом.
Рассматриваемый интегратор не лишен недостатков. При его работе наблюдается сквозное прохождение сигнала тактовой частоты на выход. Однако это редко имеет значение, так как частота тактового сигнала обычно на один-два порядка превышает частоту входных сигналов. Еще одна проблема связана с наложением спектров. Любые компоненты входного сигнала, которые отстоят по частоте от частоты тактового сигнала на величину, соответствующую частотам полосы пропускания интегратора, не будут подавлены. Эта проблема имеет место в случае, когда в спектре входного сигнала есть заметные компоненты частот, близких к тактовой частоте.
Инвертор напряжения с "плавающим" конденсатором. Существует интересный способ (рис. 13) создавать нужное нам напряжение питания отрицательной полярности в схеме, запитанной от однополярного положительного источника питания. Пара левых по схеме ключей подключает С1 к положительному источнику питания, заряжая его до Uвх, в то время как правые ключи разомкнуты. Вслед за тем входные ключи размыкаются, а правая пара ключей замыкается, подключая заряженный C1 к выходу, при этом часть его заряда передается на С2. Схема организована так, что C1 как-бы "переворачивается", выдавая на выход напряжение отрицательной полярности. Данная схема выпускается в виде готовых микросхем конвертера напряжения. Это устройство также называют инвертором напряжения, поскольку оно превращает положительное напряжение в напряжение отрицательное, и наоборот.
Рис. 13. Инвертор напряжения с "плавающим" конденсатором
Приведенные примеры составляют ничтожно малую часть схем, использующих аналоговые ключи. Одной из наиболее значимых областей применения ключей являются рассматриваемые нами далее устройства выборки-хранения (УВХ).
Устройство выборки-хранения
При сборе аналоговой информации и ее последующем преобразовании бывает необходимо зафиксировать значение аналогового сигнала в определенный момент времени. Некоторые типы аналого-цифровых преобразователей (АЦП) могут давать непредсказуемые ошибки, если их входной сигнал изменяется за время преобразования. При смене входного кода цифро-аналоговых преобразователей (ЦАП) некоторых типов из-за неодновременности установления разрядов наблюдаются флуктуации выходного напряжения. Для устранения этих явлений необходимо зафиксировать значение входного сигнала АЦП и выходного сигнала ЦАП на время преобразования.
Устройства выборки-хранения, выполняющие эту функцию, должны на интервале времени выборки повторять на выходе входной аналоговый сигнал, а при переключении в режим хранения – сохранять последнее значение выходного напряжения до поступления сигнала выборки.
|
Рис. 14. Схема простейшего УВХ (а) и сигналы на его входах и выходах (б) |
Рис. 14, а демонстрирует, как можно сделать простейшую схему выборки-хранения. Когда ключ S замкнут, выходное напряжение повторяет входное (состояние 1, рис. 14, б). Чтобы запомнить уровень аналогового сигнала в любой заданный момент, вы просто размыкаете ключ (состояние 2). Высокое полное входное сопротивление буфера на основе операционного усилителя (ОУ, у которого на входе должны быть полевые транзисторы, чтобы входной ток не слишком отличался от нуля) предотвращает нагрузку конденсатора Cхр, так что напряжение на нем "хранится" до тех пор, пока ключ не замкнется снова.
Рассмотренная нами схема УВХ имеет ряд принципиальных недостатков. Во-первых, при замкнутом ключе источник сигнала имеет значительную емкостную нагрузку. Во-вторых, операционные усилители с полевыми транзисторами на входе, применяемые в качестве выходных повторителей, имеют значительное смещение нуля.
Рассмотрим подробнее схемотехнику устройства выборки-хранения на примере выполненного в виде интегральной микросхемы УВХ типа К1100СК2, выпускаемой отечественной промышленностью (рис. 15). ОУ1 - это повторитель, предназначенный для формирования низкоомного аналога входного сигнала. Ключ S пропускает сигнал во время выборки и блокирует его прохождение в момент хранения. Конденсатор Схр запоминает сигнал таким, каким он был в момент выключения ключа. ОУ2 - это повторитель с большим входным сопротивлением, благодаря чему минимизируется ток через конденсатор во время хранения. Величина Схр выбирается, исходя из компромисса: ток утечки в ключе, и повторителе вызывает спад напряжения на конденсаторе С во время запоминания в соответствии с выражением dU/dt=I утечки/С.
Рис. 15. Функциональная схема промышленно выпускаемой интегральной схемы УВХ К1100СК2
В связи с этим для минимизации спада напряжения конденсатор С должен быть большой емкости. Однако, сопротивление ключа во включенном состоянии образует в сочетании с этим конденсатором фильтр низких частот. В связи с этим Cхр должен быть небольшой емкости, тогда высокочастотные сигналы, проходящие на выход схемы при замкнутом ключе, не будут искажаться.
ОУ1 должен обеспечивать ток заряда конденсатора равный I=C(dU/dt) и должен обладать достаточной скоростью нарастания для повторения входного сигнала. На практике скорость нарастания всей схемы обычно ограничивается выходным током первого ОУ и сопротивлением ключа во включенном состоянии.
ОУ1 управляет емкостной нагрузкой. Поэтому используются операционные усилители, обладающие стабильностью при единичном коэффициенте усиления и большой емкостной нагрузке (до 0,1 мкФ).
Заметьте, что схема на рис. 15 имеет общую отрицательную обратную связь (ООС): с выхода ОУ2 на инвертирующий вход ОУ1. Когда ключ замкнут, потенциал выхода ОУ1, вследствие действия ООС, устанавливается таким, что Uвых отличается от Uвх на величину напряжения смещения ОУ2. При этом смещение, возникающее из-за наличия ключа и ОУ2 компенсируется. Диоды D1 и D2 в этом состоянии заперты, так как напряжение на них, равное указанному смещению, достаточно мало (1-20 мВ).
При размыкании ключа управляющим сигналом выходное напряжение остается неизменным. Резистор R1 и диоды предотвращают насыщение ОУ1, которое могло бы возникнуть из-за разрыва петли ООС в этом режиме. Резистор R2 ограничивает ток заряда конденсатора хранения.
К точностным характеристикам УВХ относится напряжение смещения нуля, определяемое смещением ОУ1 (обычно не очень велико, в пределах 5 мВ, если применяется ОУ с биполярными транзисторами на входе) и дрейф фиксируемого напряжения при заданной емкости конденсатора хранения (для различных УВХ от 10-3 до 10-1 В/c при емкости Cхр=1000 пФ). Величину дрейфа можно уменьшить путем увеличения емкости Cхр. Однако это ухудшает динамические характеристики схемы.
К динамическим характеристикам УВХ относят: время выборки, показывающее как долго при самых неблагоприятных условиях длится процесс заряда конденсатора хранения с заданным уровнем допуска; и апертурную задержку – период между моментом снятия управляющего напряжения и фактическим запиранием ключа.
Существует множество интегральных схем выборки-хранения, обладающих хорошими характеристиками. Ряд схем включает в себя внутренний конденсатор хранения и гарантирует максимальное время выборки в десятки или сотни наносекунд при точности 0,01% для сигнала величиной 10 В. Величина апертурной задержки для популярных УВХ не превышает 100 нс.
Проблемы выбора конденсаторов для построения схем выборки-хранения. Конденсаторам присущи недостатки. Прежде всего это утечка (отличное от бесконечного параллельное сопротивление), последовательное сопротивление и индуктивность, ненулевой температурный коэффициент емкости. Реже вспоминают про диэлектрическое поглощение (ДП) – явление, которое очень сильно проявляет себя в следующей ситуации: возьмем конденсатор большой емкости, заряженный до напряжения в несколько вольт и быстро его разрядим, подключив к выводам резистор сопротивлением в несколько десятков Ом. Удалим резистор и понаблюдаем за напряжением на конденсаторе с помощью вольтметра с большим входным сопротивлением. Напряжение на конденсаторе будет восстанавливаться, и за несколько секунд достигнет примерно 5-10% от величины начального напряжения.
Данное явление недостаточно изучено. Полагают, что оно связано с остаточной поляризацией диэлектрического вещества между обкладками конденсатора. Особенно плохим в этом отношении является такой диэлектрик, как слюда с присущей ей слоистой структурой. С точки зрения схемы добавочная поляризация проявляет себя так, как если бы к выводам конденсатора подключили ряд последовательных RC-цепочек с постоянными времени в диапазоне от микросекунд до нескольких секунд. Этот неприятный эффект может порождать серьезные ошибки в УВХ, интеграторах и других аналоговых схемах, которые рассчитаны на идеальные характеристики конденсаторов.
По свойству ДП диэлектрики конденсаторов существенно отличаются друг от друга. Поэтому конденсаторы нужно выбирать как можно тщательней (с этой точки зрения наилучшим диэлектриком является фторопласт). В особых случаях можно прибегнуть к компенсационным схемам, в которых влияние диэлектрического поглощения электрически устраняют с помощью тщательно настроенных RС-цепочек, включенных в комплекс с запоминающим конденсатором. Этот метод очень сложен в расчете и иногда используется в высококачественных модулях УВХ.
Дата: 2019-12-22, просмотров: 417.