 |
Рассмотрим простой пример. Пусть два робота Rb1 и Rb2 перекладывают детали из накопителя S на два конвейера С1 и С2 (рис. 4.1).
В соответствии с изложенным выше, роботы Rb1, Rb2 будем описывать как конечные автоматы
Rbi = (Ii, Oi, Ui, Xi, Zi, fi, hi), i=1,2 (4.4)
со следующими атрибутами:
Ii ={i0}; Oi ={i0}; Ui ={g}; xi ={0, 1, 2}; Zi ={y, Y}, i = 1,2 (4.5)
 |
Функции fi и hi задаются диаграммой, представленной на рис. 4.2. Каждый из роботов Rbi воспринимает только одну команду «g», в результате которой он перемещается к накопителю S, захватывает деталь, переносит и устанавливает ее на конвейер Сi. Сигналы «y» и «Y» на выходе робота появляются тогда, когда он освобождает опасную зону и завершает выполнение одного цикла соответственно. Будем строить управляющую структуру в виде трех автоматов, два из которых (Reg1 и Reg2) являются логическими регуляторами роботов, а третий (Res) обеспечивает слежение за ресурсом.
|
4.1.3 Анализ функционирования планировщика
Приведенный выше способ координации является весьма эффективным средством для построения только централизованных систем управления. Действительно, если нижний уровень управляющей структуры представляет собой по сути дела логические регуляторы и может быть без труда ассоциирован с локальными системами управления, то верхние уровни обмениваются данными со всеми подсистемами, участвующими в выполнении задания, и потому являются фрагментом центральной системы управления.
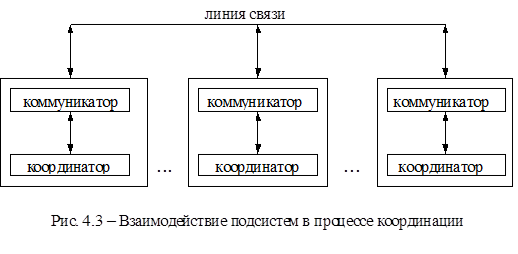
Естественный способ преодоления этой трудности состоит в формировании одноуровневой управляющей структуры, т.е. такой, у которой число автоматов совпадает с числом подсистем, разрешив этим автоматам обмениваться данными непосредственно между собой, а не с верхним уровнем. Это, с одной стороны, приводит к усложнению довольно простого логического регулятора, а с другой стороны позволяет обойтись без центральной системы управления. На рис. 4.3 показана соответствующая архитектура системы управления (модули, не связанные с координацией, не показаны).
Планирование исполнения информационно-двигательных действий
Рассмотрим сначала метод планирования задания для централизованной системы. Суть подхода состоит в выполнении двухшаговой процедуры:
Шаг 1. На основе методов искусственного интеллекта найти последовательность подзаданий, выполняемых каждой из подсистем и сформированных в терминах входных алфавитов подсистем.
Шаг 2. Преобразовать эти последовательности в управляющую структуру, которая обеспечит координацию исполнения сформированного задания.
Обсудим более детально эту процедуру. В качестве метода решения задачи планирования будем использовать исчисление предикатов первого порядка. Входная информация, необходимая для решения задачи планирования, состоит из следующих компонент, содержащих описание:
К1 – возможностей каждой из подсистем,
К2 – начального состояния,
К3 – задания,
К4 – универсальных свойств.
Компонента К1 включает набор предложений (правил), отражающих возможности каждой подсистемы изменять состояние внешней среды (перемещение объектов, получение информации об объектах и т.д.). Отличительной особенностью этой компоненты является наличие сколемовской функции, относящейся к одной из подсистем. Множество К2 включает факты, описывающие начальное состояние системы. Компонента К3 представляет собой формулировку задания. Множество К4 описывает универсальные свойства, не зависящие от подсистем, входящих в состав МРС (это множество может быть пусто). Элементы всех множеств представляют собой правильно построенные формулы (ППФ) в исчислении предикатов 1‑го порядка.
Задача планирования состоит в получении последовательности операторов, обеспечивающих выполнение цели. При этом для обеспечения максимально возможного распараллеливания процесса исполнения представим множество К1 в виде:
 (4.6)
(4.6)
где N – множество подсистем.
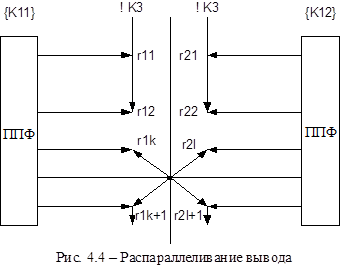
Таким образом, каждое подмножество К1i содержит только ППФ, отражающие возможности i‑ой подсистемы. После осуществления такого разбиения будем строить резолюции rij, и не-цели с элементами К1i настолько долго, насколько это возможно. Если этот процесс невозможно продолжить, оставаясь в К1i (это означает, что на этом этапе исполнения необходимо взаимодействие между подсистемами), строим резолюции с соседними подмножествами. Такой процесс обеспечит (в случае успеха) получение последовательности операторов, относящихся к каждой из подсистем, а также точек координации их взаимодействия. Далее полученные результаты используются для преобразования в управляющую структуру, обеспечивающую исполнение сформированного плана (рис. 4.4).
Дата: 2019-07-24, просмотров: 186.