Многокомпонентная система это система, включающая в свой состав множество подсистем, объединенных общим заданием.
Можно дать ее более точное определение.
Пусть задание T может быть представлено как множество подзаданий ti:
T = {t1, t2,…, tm} (3.1)
Введем отношение следования F на T, так что tiFtj означает, что задание ti может быть выполнено только, если выполнено tj. Если такая структуризация задания T проведена, тогда можно построить описывающий T ориентированный граф:
G = (T, A), (3.2)
где T = {ti} – множество вершин графа G, A = {ai} Î T ´ T – множество направленных дуг, при этом дуга a Î A соединяет ti с tj тогда и только тогда, когда tiFtj.
Пусть система S состоит из подсистем si (далее называемых локальными системами или терминалами):
S = {s1, s2,…, sN}, (3.3)
при этом Ti Ì T – задание, выполняемое системой si.
Тогда систему:
CS = (S, T), (3.4)
будем называть T‑сложной системой (далее – сложной системой), если выполнены следующие условия:
 (3.5)
(3.5)
Условия C1, C2 можно интерпретировать следующим образом:
C1: Сложная система представляет собой набор подсистем, которые в состоянии выполнить задание T.
С2: Действия всех подсистем, входящих в состав сложной системы, должны координироваться в процессе выполнения задания. Под координацией здесь мы понимаем обмен данными (или командами) между подсистемами.
Если одна из подсистем si Î S является роботом, то такую сложную систему будем называть многокомпонентной робототехнической системой (МРС).
Выбор способа организации управления робототехнической системой
Обсудим сначала следующий вопрос: «Что мы понимаем под управлением МРС?» В действительности, каждая из подсистем Si, входящая в состав МРС, обладает собственной системой управления, способной обеспечить выполнение всех функций, свойственных этой подсистеме. Однако, возникающая для рассматриваемого класса систем необходимость взаимодействовать в процессе исполнения задания, ставит задачу формирования для подсистемы именно того задания, выполнение которого диктуется сложившейся обстановкой. Таким образом, задача управления распределенными системами состоит в планировании действий подсистем до начала исполнения и последующей координации в процессе исполнения.
Организация процедуры планирования и координации является чрезвычайно важной: она оказывает существенное влияние на используемые методы управления.
Централизованное управление
Этот метод организации предполагает наличие центральной системы управления, которая планирует действия всех подсистем и затем координирует их взаимодействие в процессе исполнения (рис. 3.2) в соответствии с предварительно разработанным планом. Центральная система управления (ЦСУ) передает подсистеме задание, исполнение которого не требует какой-либо координации между подсистемами. Результат исполнения возвращается в ЦСУ. В зависимости от присланного результата ЦСУ посылает подсистеме следующее задание, и далее процесс повторяется. Заметим, что физически ЦСУ может быть реализована либо как отдельное устройство, либо на базе системы управления одной из компонент МРС.
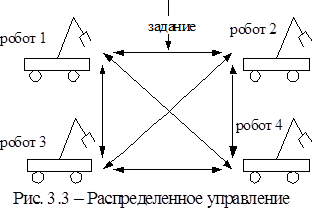
Распределенное управление
При таком способе организации управления отсутствует центральная система, и процессы планирования заданий и координация в процессе исполнения реализуются путем обмена сообщениями между подсистемами (рис. 3.3). На этапе планирования осуществляется переговорный процесс, результатом которого является согласованный план исполнения задания. Реализация этого плана происходит на этапе исполнения и состоит в выполнении подзаданий и обмене результатами их исполнения. Строго говоря, при такой организации нельзя говорить об управлении распределенной системой, поскольку, в отличие от централизованной организации, отсутствует явно выраженный носитель управления, обеспечивающий требуемое поведение системы: все подсистемы являются равноправными как на этапе планирования, так на этапе исполнения.
Таким образом, централизованное управление реализует иерархический способ организации системы, состоящий в частности в том, что управление является многоуровневым с явным подчинением нижних уровней (локальных систем управления) верхним (центральной системе управления). Все обмены сообщениями между подсистемами происходит не напрямую, а через верхний уровень. Распределенное управление реализует гетерархический способ организации, когда все компоненты системы равноправны и процесс планирования осуществляется параллельно всеми подсистемами.
Дата: 2019-07-24, просмотров: 175.