Содержание
Содержание. 1
Введение. 3
1 Общая теория оптимального управления. 6
1.1 Допустимые управления. 6
1.2 Основные направления в теории оптимальных процессов. 11
1.2.1 Метод динамического программирования. 12
1.2.2 Принцип максимума. 13
1.3 Программное управление. 16
1.4 Постановка задачи и способы решения. 18
2 Система оптимального управления. 24
2.1 Математическое описание электромеханической системы.. 24
2.2 Идентификация авторегрессионно-регрессионной модели. 29
2.3 Формирование ограничений. 37
2.4 Формирование оптимальных траекторий. 42
2.5 Анализ решений. 50
2.6 Общая структура системы оптимального управления. 55
2.7 Полученные результаты.. 58
3 Практическая реализация. 63
3.1 Реализация оптимального управления в среде пакета matlab. 63
3.2 Выбор микроконтроллера. 64
4 Экономическое обоснование проекта. 66
4.1 Технико-экономическая характеристика. 66
4.2 Маркетинговая ориентация. 66
4.3 оценка научно-технической результативности и социальной эффективности НИР 68
4.4 Производственный план. 74
4.4.1 Расчёт затрат на разработку. 75
4.4.2 Затраты на создание опытного образца. 77
4.4.3 Затраты на эксплуатацию.. 79
4.4.4 Ценообразование. 79
Выводы.. 80
5 Безопасность и экологичность проекта. 81
5.1 Анализ опасных и вредных факторов. 82
5.2 Мероприятия по улучшению условий труда. 83
5.2.1 Помещения и их освещение. 83
5.2.2 Уровень шума и вибрация. 85
5.2.3 Параметры микроклимата. 86
5.2.4 Защита от электромагнитных и электростатических полей. 87
5.2.5 Электробезопасность. 90
5.2.6 Дисплейные терминалы и ПЭВМ в составе АРМ.. 91
5.2.7 Организация и оборудование рабочих мест с ВДТ и ПЭВМ.. 93
5.2.8 Требования к организации режима труда и отдыха при работе на АРМ.. 95
5.3 Устойчивость проекта к чрезвычайным ситуациям. 97
5.4 Экологичность проекта. 98
5.5 Выводы.. 99
Заключение. 100
Приложение. 101
Блок-схема файл-функции OPTIMUM_CONTR.. 101
Введение
Во многих областях техники и технологии приходится иметь дело со следующей задачей, которую можно трактовать как задачу «сопровождения цели». Причем, наблюдаемый процесс в некоторых случаях является детерминированным, т.е. полностью определенным, а в некоторых — не известным, но и в том и в другом случае в нем присутствует шум — случайная составляющая. Заданием для управляемого объекта служит движение другого объекта — задающего. Таким образом, задача слежения сводится к задаче перевода системы из начального состояния в наперед заданное состояние, которое определяется фазовым состоянием наблюдаемой системы.
В начальный момент времени t0 объект находится в фазовом состоянии x0; требуется выбрать такое управление u( t), которое переведет объект в заранее заданное конечное фазовое состояние x1 (отличное от x0). При этом нередко бывает, что начальное состояние x0 заранее неизвестно.
Такое управление часто осуществляется человеком (оператором), который следит за приборами и старается выбирать управление, поддерживающее объект в требуемом рабочем режиме.
Однако в современных условиях высокого развития техники оператор зачастую не может успешно справиться с этой задачей ввиду сложности поведения объекта, большой быстроты протекания процессов и т. п. Поэтому чрезвычайно важно создать такие приборы, которые сами, без участия человека, управляли бы работой объекта (например, в случае выхода объекта из рабочего состояния возвращали бы его в это рабочее состояние). Такие приборы сейчас очень распространены в технике, их изучением занимается теория автоматического управления.
В общем случае на вход регулятора подаются фазовые координаты объекта. Регулятор конструируется так, что его выходная величина u, поданная на вход объекта, нужным образом управляет работой объекта (т. е., например, возвращает объект в рабочее состояние, если он почему-либо вышел из этого состояния).
Обычно требуется, чтобы переходный процесс (т. е. процесс перехода из начального фазового состояния x0 в предписанное конечное состояние x1) был в определенном смысле «наилучшим», например, чтобы время перехода было наименьшим или чтобы энергия, затраченная в течение переходного процесса, была минимальной и т. п. Такой «наилучший» переходный процесс называется оптимальным процессом.
Разумеется, желательно, чтобы регулятор не просто возвращал объект в рабочее состояние, а делал это наилучшим образом, например, в смысле быстродействия (т.е. возвращал объект в рабочее состояние за кратчайшее время). В связи с этим в теории автоматического управления рассматриваются весьма различные (по устройству и степени сложности) регуляторы. Рассмотрение регуляторов, которые применялись на практике и изучались в руководствах по автоматическому регулированию до возникновения теории оптимальных процессов, приводит к выводу, что уменьшение времени переходного процесса связано с усложнением конструкции регулятора; поэтому, усложняя конструкцию регулятора, можно лишь приближаться к «идеальному», «оптимальному» регулятору, который во всех случаях осуществляет переходный процесс за кратчайшее время.
Одной из важных заслуг теории оптимальных процессов является установление существования оптимальных регуляторов и создание математического аппарата, позволяющего рассчитывать такие регуляторы. Оптимальные регуляторы существенно отличаются от тех, которые до сих пор изучались в теории автоматического управления.
На данном уровне развития техники и технологии для такого рода управления в большинстве случаев используются стандартные регуляторы (например, ПИД-регуляторы). Во многих случаях их применение может быть оправдано и их работа удовлетворяет поставленным целям управления, но существуют ситуации, в которых применение таких регуляторов не дает необходимого результата. Использование ПИД-регуляторов может оказаться нецелесообразным в случае ограничений на управление. В такой ситуации, система в целом оказывается существенно нелинейной и классические приемы управления в этом случае не приемлемы.
В данной работе рассматривается система, состоящая из двух электроприводов, один из которых является ведущим, а другой — ведомым. Ведомый двигатель должен двигаться синхронно с ведущим. Система должна отрабатывать заданную траекторию с необходимой точностью и максимальным быстродействием.
Допустимые управления
Наиболее перспективным решением экстремальных задач является их решение на основе теории принципа максимума Понтрягина. В данной работе ставилась задача оптимизации по времени, для чего и были использованы методы оптимального управления, предложенные Л.С. Понтрягиным, В.Г. Болтянским, Р.В. Гамкрелидзе. [1]
Задача оптимального быстродействия заключается в отыскании такого управления u( t), для которого фазовая траектория x( t) проходит через точку x1 и переход из х0 в х1 осуществляется за кратчайшее время. Такое управление u( t) называется оптимальным управлением (в смысле быстродействия); точно так же соответствующую траекторию x( t), по которой фазовая точка за кратчайшее время переходит из состояния x0 в состояние x1 называется оптимальной траекторией.
Обычно управляющие параметры u1,..., ur не могут принимать совершенно произвольные значения, а подчинены некоторым ограничениям. Это обусловлено техническими характеристиками реальных объектов управления, а также конструкцией регулирующих устройств.
Например, для двигателя постоянного тока (ДПТ), одним из управляющих параметров служит напряжение якоря; однако именно в силу конструктивных особенностей ДПТ этот параметр подчинен ограничениям указанного типа. Так, значение этого параметра не может принимать сколь угодно большое значение.
Для объекта, содержащего r управляющих параметров u1, u2, ..., ur, в приложениях часто встречается случай, когда эти параметры могут произвольно меняться в следующих пределах:

Т. е. каждая из величин u1, u2, ..., ur представляет собой отдельный управляющий параметр, область изменения которого не зависит от значений остальных управляющих параметров и задается неравенствами
 (1.1)
(1.1)
Заметим, что при r = 2 точки  , координаты которых подчинены неравенствам (1.1), заполняют прямоугольник (рисунок 1.1); при r = 3 неравенства (1.1) определяют в пространстве переменных u1, u2, u3 прямоугольный параллелепипед.
, координаты которых подчинены неравенствам (1.1), заполняют прямоугольник (рисунок 1.1); при r = 3 неравенства (1.1) определяют в пространстве переменных u1, u2, u3 прямоугольный параллелепипед.

В общем случае будем считать, что в соответствии с конструкцией объекта и условиями его эксплуатации задано в пространстве переменных u1, ..., ur некоторое множество U и управляющие параметры u1, u2, ..., ur должны в каждый момент времени принимать лишь такие значения, чтобы точка  принадлежала множеству U. Т. е. разрешается рассматривать лишь такие управления u( t), что
принадлежала множеству U. Т. е. разрешается рассматривать лишь такие управления u( t), что  для любого t. Множество U называется областью управления.
для любого t. Множество U называется областью управления.
Область управления U, в общем случае, может быть не только параллелепипедом, но может иметь более или менее геометрически сложный характер, так как благодаря конструкции объекта между управляющими параметрами могут существовать некоторые связи, выражаемые некоторыми уравнениями или неравенствами. Указанные области управления должны входить в математическое описание объекта.
Для технических задач важен случай замкнутого множества U, т.е. случай, когда точка  может находиться не только внутри множества, но и на его границе. Т.е. для «рулей» допустимы и их крайние положения.
может находиться не только внутри множества, но и на его границе. Т.е. для «рулей» допустимы и их крайние положения.
Для полного осмысления данного вопроса необходимо сделать еще одно, очень важное, предположение о характере управлений. Возможны несколько случаев представления управляющих воздействий. А именно, в одном случае, когда это позволяет точность представления, можно предполагать, что «рули», положения которых характеризуются управляющими параметрами u1, u2, ..., ur, безынерционны, так что есть возможность, если нужно, мгновенно переключать эти «рули» из одного положения в другое, т. е. менять скачком значения управляющих параметров u1, u2, ..., ur в пределах области управления.
В другом случае, когда точность расчетов не допускает таких приближений нужно предполагать, что управляющие воздействия не могут меняться скачкообразно на сколь угодно большую величину, т.е. существует ограничение не только на значение управляющего параметра, но и на скорость изменения этого параметра. В этом случае достаточно написать  , где
, где  — скорость изменения управляющего параметра, и принять за управляющий параметр величину
— скорость изменения управляющего параметра, и принять за управляющий параметр величину  . Т. о. существует ограничение вида
. Т. о. существует ограничение вида
 (1.2)
(1.2)
что несколько осложняет поиск оптимального управления.
Всякий реальный процесс обладает некоторой «инерционностью», но во всяком реальном управляемом объекте всегда можно найти такие управляющие параметры, которые, в пределах заданной точности, можно считать безынерционными.

В соответствии с этим будут рассматриваться не только непрерывные, но и кусочно-непрерывные управления u( t). Класс кусочно-непрерывных управлений хорош тем, что, во-первых, позволяет получить точное математическое решение оптимальной задачи для широкого класса примеров, а во-вторых, наиболее интересен и удобен для технической реализации.
Необходимо уточнить, что функция  со значениями в области управления U называется кусочно-непрерывной, если она состоит из конечного числа непрерывных кусков (рисунок 1.2), т.е. непрерывна для всех рассматриваемых t, за исключением лишь конечного числа моментов времени, где функция u( t) может терпеть разрывы первого рода; последнее означает, что в каждой точке разрыва t предполагается существование конечных пределов слева и справа:
со значениями в области управления U называется кусочно-непрерывной, если она состоит из конечного числа непрерывных кусков (рисунок 1.2), т.е. непрерывна для всех рассматриваемых t, за исключением лишь конечного числа моментов времени, где функция u( t) может терпеть разрывы первого рода; последнее означает, что в каждой точке разрыва t предполагается существование конечных пределов слева и справа:

Значение кусочно-непрерывного управления u( t) в точке разрыва не играет сколько-нибудь существенной роли. Однако для определенности будет удобно предполагать, что управление u( t) в точках разрыва непрерывно справа, т. е. что в каждой точке разрыва t значение управления u( t) равно пределу справа:

Кроме того, предполагается, что каждое рассматриваемое управление u( t) непрерывно в концах отрезка  на котором оно задано, т. е. что все его точки разрыва, если они есть, расположены на интервале
на котором оно задано, т. е. что все его точки разрыва, если они есть, расположены на интервале  .
.

Допустимым управлением называют всякую кусочно-непрерывную функцию  со значениями в области управления U, непрерывную справа в точках разрыва и непрерывную в концах отрезка на котором она задана.
со значениями в области управления U, непрерывную справа в точках разрыва и непрерывную в концах отрезка на котором она задана.
Оптимальные управления оказываются, в большинстве случаев, разрывными (т.е. содержащие скачки и переключения). Если разрывная функция, график которой изображен на рисунке 1.3 сплошной линией, представляет собой оптимальное управление, то, «сгладив» эту функцию (пунктир на рисунке 1.3), будет получена близкая к ней непрерывная функция. Но какая бы «близкая» к оптимальному управлению непрерывная функция ни была, всегда можно выбрать «сглаживающий» кусок еще более крутым и получить непрерывную функцию, еще более близкую к оптимальному управлению. Таким образом, в классе непрерывных функций просто не будет наилучшего, оптимального управления, а предельным случаем является кусочно-непрерывная функция, которая и является оптимальным управлением.
Принцип максимума
Гипотеза 1.3. Функция w( x) имеет при x ¹ x1 вторые непрерывные производные  , а функции
, а функции  — первые непрерывные производные
— первые непрерывные производные  .
.
Теорема 1.2. Предположим, что для рассматриваемого управляемого объекта, описываемого уравнением
 (1.5)
(1.5)
И предписанного конечного состояния x1 выполнены гипотезы 1.1, 1.2 и 1.3. Пусть  , — некоторый процесс, переводящий объект из начального состояния x0 в состояние x1. Введем в рассмотрение функцию H, зависящую от переменных
, — некоторый процесс, переводящий объект из начального состояния x0 в состояние x1. Введем в рассмотрение функцию H, зависящую от переменных  и некоторых вспомогательных переменных
и некоторых вспомогательных переменных 
 ........................................................................ (1.6)
........................................................................ (1.6)
С помощью этой функции H запишем следующую систему дифференциальных уравнений для вспомогательных переменных:
 (1.7)
(1.7)
Тогда, если процесс  является оптимальным, то существует такое нетривиальное решение
является оптимальным, то существует такое нетривиальное решение  , системы (1.7), что для любого момента t,
, системы (1.7), что для любого момента t,  , выполнено условие максимума
, выполнено условие максимума
 (1.8)
(1.8)
и условие

Эта теорема значительно удобнее для отыскания оптимальных процессов, чем метод динамического программирования. Однако в приведенной здесь форме принцип максимума страдает тем же недостатком, что и метод динамического программирования: он выведен в предположении дифференцируемости (и даже двукратной) функции w( x), а эта функция, как уже отмечалось, в действительности не является всюду дифференцируемой.
Однако принцип максимума доставляет достаточную информацию для решения поставленной задаче оптимального управления.
Благодаря работам Р.В. Гамкрелидзе, принцип максимума был доказан для линейных систем. Им были доказаны теоремы существования, единственности и теорема о числе переключений.
В данном случае функция Н принимает вид
 (1.9)
(1.9)
Выражение (1.7) в векторной форме записывается в виде
 (1.10)
(1.10)
а соотношение (1.8) принимает в данном случае вид
 (1.11)
(1.11)
Теорема 1.3 (теорема существования). Область управляемости является выпуклым открытым множеством фазового пространства Х; для любой точки х0, принадлежащей области управляемости, существует оптимальное управление, переводящее точку х0 в начало координат.
Примечание: Множество G называется открытым, если для каждой его точки можно найти шар с центром в этой точке, целиком принадлежащий множеству G, иначе говоря, множество G открыто, если к нему не причисляется ни одна точка его границы.
Областью управляемости объекта называется множество всех тех точек х0 фазового пространства X, из которых возможно при помощи какого-либо допустимого управления попасть в начало координат. Само начало координат тоже причисляется к области управляемости.
Теорема 1.4 (теорема о числе переключений). Для каждого нетривиального решения y(t) уравнения (1.10) соотношение (1.11) однозначно определяет допустимое управление u(t); при этом оказывается, что функция u(t) кусочно-постоянна и ее значениями являются лишь вершины многогранника U.
Таким образом, функция u( t) кусочно-постоянна, принимает значения в вершинах многогранника U и определена однозначно. Каждую точку разрыва оптимального управления называют точкой переключения.
В общем случае число переключений хотя и конечно, но может быть произвольным. Однако существует один важный для приложений случай, когда число переключений допускает точную оценку. Этот случай рассматривается в теореме принадлежащей А.А. Фельдбауму. В этой теореме говорится (упрощенно), что каждая из функций  кусочно-постоянна и имеет не более n—1 переключений (т.е. не более n интервалов постоянства), где n — порядок системы.
кусочно-постоянна и имеет не более n—1 переключений (т.е. не более n интервалов постоянства), где n — порядок системы.
Таким образом, принцип максимума является наиболее удобным для решения задачи об оптимальном быстродействии.
Программное управление
Сегодня оборудование с программным управлением распространено весьма широко, начиная от компаний, входящих в TOP 500 Fortune в больших промышленных зонах, и заканчивая малыми предприятиями частного бизнеса. Действительно весьма трудно найти ту область машиностроения, где еще не используются уникальные возможности этого оборудования. Поэтому каждый специалист в области машиностроения должен хорошо представлять то, что дает производству применение этого весьма интеллектуального оборудования.
Программное управление технологическим оборудованием и процессами охватывает управление движением машин, механизмов, транспортных средств и изменением физических и химических параметров технологического процесса.
Программное управление — это управление режимом работы или состоянием объекта по заранее заданной программе. При автоматическом программном управлении технологическим оборудованием, соответствующая алгоритму программа записывается в память управляющего устройства с последующим автоматическим считыванием и преобразованием в управляющие сигналы.
Программное управление может быть реализовано на различных классах вычислительных машин, начиная от микроЭВМ и заканчивая мощными вычислительными системами. Каждый из этих классов накладывает на алгоритмы некоторые ограничения, которые необходимо учитывать при разработке алгоритмического обеспечения.
Разрабатываемый алгоритм ориентируется для использования в микроконтроллерах, что накладывает особые ограничения на полученный алгоритм.
Необходимо отметить, что микроконтроллеры выполняют операции для дискретного времени и дискретных величин. Вычисления осуществляются с конечной точностью и за конечное время.
Следует также учитывать тот факт, что микроконтроллеры не вычисляют точных значений интегралов и производных, но могут оценивать их значения в конечных разностях, т.е. с помощью численных методов.
Еще одним из важнейших условий, необходимым для успешной практической реализации, является необходимость учитывать отношение стоимости и мощности микроконтроллеров, которые будут использоваться в производстве.
Таким образом, после определения алгоритма оптимального управления для его реализации на реальном микроконтроллере необходимо выполнить оптимизацию по количеству операций, необходимых для проводимых вычислений, а также выполнить оценку точности вычислений. Оценка точности вычислений налагает ограничения на разрядность используемых микроконтроллеров, что в свою очередь сказывается на стоимости устройства в целом. Поэтому, изначально, алгоритм должен ориентироваться на элементарные операции сложения и вычитания, а также логические операции при переключении режимов.
При наличии сложных функциональных зависимостей, необходимо выполнить оценку их табулируемости для обеспечения высокого быстродействия работы алгоритма.
Формирование ограничений
Любая реальная техническая система имеет ограничения на управление. Это обусловлено конструкцией и техническими характеристиками рассматриваемой системы. Ограничения отражаются в технических условиях на эксплуатацию системы.
Управляющим параметром электропривода является напряжение на якоре, которое обозначается U. В связи с техническими особенностями данного объекта управления, напряжение на якоре не может превышать некоторого предельно допустимого значения. Это обусловлено максимальным током в обмотке якоря  , а также характеристиками источника энергии, используемого в данной системе. Таким образом, необходимо учитывать это ограничение при разработке управляющего устройства.
, а также характеристиками источника энергии, используемого в данной системе. Таким образом, необходимо учитывать это ограничение при разработке управляющего устройства.
Еще одним ограничением на управляющий параметр, является то, что величина не может меняться скачкообразно на сколь угодно большую величину. Это ограничение обусловлено возможностями и конструкцией источника энергии и регулирующего устройства, которое задает характер изменения величины управляющего параметра. Это второе ограничение, накладываемое на управление.
Таким образом в данной работе рассматривается следующий случай: область управления U имеет размерность 2, т.е. эта область представляет собой плоскость в пространстве управлений.
Математически область управления U для данной системы задается следующей системой выражений:
 (2.14)
(2.14)
где первое выражение накладывает ограничение на величину, а второе — на скорость изменения значения управляющего параметра. Выражение (2.14) представляет собой ограничения, написанные для непрерывных систем. Так как в рассматриваемом случае рассматривается дискретное время, то перепишем систему (2.14) в виде, пригодном для дискретных систем:
 (2.15)
(2.15)
где  — представляет собой разность значений управляющего параметра текущего и предыдущего моментов времени, что для дискретных систем является аналогом скорости непрерывных систем.
— представляет собой разность значений управляющего параметра текущего и предыдущего моментов времени, что для дискретных систем является аналогом скорости непрерывных систем.
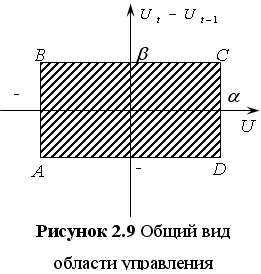
На рисунке 2.9 представлен общий вид области управления для рассматриваемой задачи.
Реальные численные значения данных границ зависят от коэффициентов масштабирования реальной системы, которые определяются входящими в систему усилителями и преобразователями, и выбираются для каждого моделируемого объекта индивидуально, в строгом соответствии с техническими условиями и правилами эксплуатации. Для данной системы ограничения имеют вид:
 (2.16)
(2.16)
Для того чтобы перейти из пространства управлений в базис времени необходимо воспользоваться теоремой Гамкрелидзе о числе переключений [1]. Движение будет осуществляться по граням области управления, т.е. по сторонам прямоугольника в пространстве управлений. На рисунке 2.10 представлены ограничения в координатах (t, U).
Ограничение на величину параметра представляет собой две горизонтальные линии, обозначенные на рисунке пунктиром, с ординатами a и –a. Ограничение на скорость изменения величины управляющего параметра определяется углом g наклона траектории:
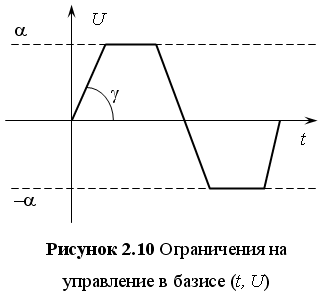
Как видно из рисунка 2.10 управление имеет вид кусочно-гладкой функции с несколькими переключениями.
Точки переключений в базисе (t, U), соответствуют вершинам прямоугольника области управления (рисунок 2.9). Участок 1 на рисунке 2.11 соответствует движению по часовой стрелке по отрезку BC. Это движение будет длиться до момента достижения точки C, далее движение будет происходить по отрезку CD, на рисунке 2.11 этому движению соответствует участок 2. Движение по участку CD в пространстве управлений будет длиться до момента достижения точки D и т.д.
Существует один интересный случай, когда скорость управления, скачком меняется на противоположное значение, т.е. в пространстве управлений будет наблюдаться скачок с отрезка BC на отрезок CD. Этому соответствует участок 2’ в базисе (t, U). Участок 2’’ на рисунке 2.11 соответствует скачку с отрезка BC на отрезок CD в пространстве управлений, не достигнув точки переключения.
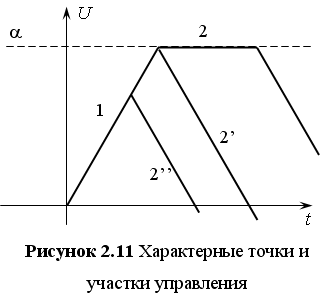
На самом деле такой характер изменения скорости допустим, так как при задании ограничений говорилось, что скачком не может меняться только величина управляющего параметра, тогда как на скорость изменения этого параметра такого ограничения не накладывалось. Это не противоречит рассуждениям приведенным в разделе 1.1. То есть управляющий параметр является не безынерционным, а скорость изменения этого параметра — безынерционным. Правомерность этого утверждения легко подтверждается физическим смыслом управления, являющегося напряжением на якоре.
Необходимо рассмотреть случай, при котором возникшую ошибку можно ликвидировать за один шаг. Запишем регулятор для АРРМ вида (2.8), обеспечивающий равенство  . Выражение для такого регулятора имеет вид:
. Выражение для такого регулятора имеет вид:

или для ошибки:
 [5]
[5]
Будем называть такое управление одношаговым. Для реализации такого управления необходимо, чтобы выработанное таким образом управление также удовлетворяло условию (2.15), а иначе такое управление является нереализуемым за один шаг.
Анализ решений
Для последующего анализа решений в базисе ошибок, необходимо рассмотреть несколько вариантов начальных условий. Для этого необходимо разбить пространство ошибок на характерные подпространства.
Так как угол рассогласования не может превышать угла в 180°, то и ошибка не может превышать этого значения. Таким образом, в базисе ошибок можно выделить вертикальную полосу шириной 2p ([–p, +p]), за границы которой ошибка по углу не может выходить. На самом деле, если ошибка  превышает значение p, то угол рассогласования рассчитывается как показано ниже:
превышает значение p, то угол рассогласования рассчитывается как показано ниже:
 (2.23)
(2.23)
где  — новое значение ошибки, не превышающее p.
— новое значение ошибки, не превышающее p.
Следует также упомянуть следующее: при положительной ошибке начальная точка будет находиться справа от оси ординат, а при положительной ошибке  — выше оси абсцисс.
— выше оси абсцисс.
Так как управление имеет ограничение на величину, то величина скорости вращения вала системы не будет превышать некоторого максимального установившегося значения. Таким образом, величина ошибки  тоже не будет превышать некоторого максимального значения, определяемого максимальной скоростью системы и равной
тоже не будет превышать некоторого максимального значения, определяемого максимальной скоростью системы и равной  . Из этого следует, что в базисе ошибок необходимо выделить горизонтальную полосу шириной
. Из этого следует, что в базисе ошибок необходимо выделить горизонтальную полосу шириной  (
(  ), за границы которой ошибка по скорости не может выходить.
), за границы которой ошибка по скорости не может выходить.
Таким образом, в пространстве ошибок выделена прямоугольная область допустимых значений ошибок. Все движения будут происходить именно в этой области.
На рисунке 2.17 показаны оптимальные траектории в пространстве ошибок. Выделим из всего множества траекторий две, приводящие в ноль. Будем называть эти траектории главными. У левой главной траектории выделим верхнюю ветвь, а у правой — нижнюю. Движение по этим ветвям приводит в начало координат. Так как в разделе 1.4 была поставлена задача (1.12), то эти две ветви необходимо выделить особо, так как при движении по ним выполняется первое условие задачи (1.12).
Указанные выше ветви главных траекторий делят область ошибок на два подпространства P и Q. Анализ этих подпространств делается ниже.

Вокруг начала координат ограничим некоторую область S. Данная область соответствует такому положению системы, при котором управление необходимое для коррекции этой ошибки не будет превышать своего максимального значения, то есть не будет нарушаться первое выражение системы (1.13). В графической интерпретации, в пространстве управлений движение будет происходить по горизонтальным границам (рисунок 2.7). Верхняя и нижняя ветки главных траекторий разбивают пространство S на два подпространства — S1 и S2.
Таким образом, были построены четыре подпространства в пространстве ошибок, которые изображены на рисунке 2.18.
Количество точек переключения и вид управления зависит от начальных условий. Рассмотрим различные варианты начальных условий:
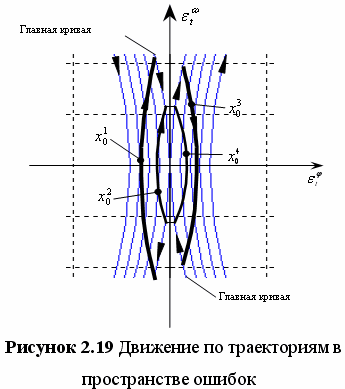
1) система находится в точке лежащей в плоскости P (точка  на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить по траектории, состоящей из двух кривых, то есть траектория будет иметь два интервала постоянства; этому движению соответствует управление с тремя точками переключения (рисунок 2.20, участок 1);
на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить по траектории, состоящей из двух кривых, то есть траектория будет иметь два интервала постоянства; этому движению соответствует управление с тремя точками переключения (рисунок 2.20, участок 1);
2) система находится в точке лежащей в плоскости S1 (точка  на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить также по двум кривым, то есть траектория будет иметь два интервала постоянства; но этому движению соответствует управление с двумя точками переключения (рисунок 2.20, участок 2);
на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить также по двум кривым, то есть траектория будет иметь два интервала постоянства; но этому движению соответствует управление с двумя точками переключения (рисунок 2.20, участок 2);

3) в случае когда система находится в подпространстве Q, движение будет иметь такое же количество интервалов постоянства и точек переключения как и случай 1, но знак управляющего параметра изменится на противоположный (рисунок 2.19, точка  , рисунок 2.20, участок 3);
, рисунок 2.20, участок 3);
4) в случае когда система находится в подпространстве S2, движение будет иметь такое же количество интервалов постоянства и точек переключения как и случай 2, но знак управляющего параметра изменится на противоположный (рисунок 2.19, точка  , рисунок 2.20, участок 4);
, рисунок 2.20, участок 4);
Т. о. данные траектории являются решением задачи об оптимальном быстродействии и задача сводится к нахождению моментов времени переключений управляющего параметра U.
При определении моментов точек переключения можно использовать как аналитические выражения, так и численные методы. При определении моментов точек переключения аналитически необходимо решить систему уравнений вида (2.18) для частного случая, где одно из уравнений написано для кривой, являющейся главной траекторией, а другое — для кривой, проходящей через точку, в которой находится система в данный момент и пересекающую главную траекторию, описанную первым уравнением системы. Общий вид системы приведен ниже:

В том случае, если аналитические выражения не удовлетворяют требованиям, предъявленным к алгоритму в разделе 1.3, точки переключения необходимо искать численными методами.
Как уже было сказано выше, численные методы имеют итерационный характер, и не обладают высокой точностью.
Полученные результаты
В соответствии с проведенными рассуждениями и опираясь на структурную схему, приведенную в предыдущем разделе, была построена математическая модель данной системы оптимального управления. Математическое описание и программирование алгоритма проводилось в среде пакета MatLab 6.5.
Начальными данными для проведения расчетов является семейство траекторий системы, экспериментально полученные при проведении исследований динамических характеристик и параметров привода РЛС в ООО НПО «Горизонт» [3]. Исходные данные приведены на рисунке 2.4.
Для сравнения результатов были использованы данные, полученные в результате измерения выходных координат системы регулирования привода антенны, построенной с использованием ПИД-регулятора [3]. На рисунке 2.24 приведены зависимости ошибки рассогласования антенн (сплошная линия) и управления (пунктирная линия) от времени.

На рисунке 2.25 – 2.26 приведены данные, полученные в результате работы описанного выше алгоритма оптимального управления. На рисунке 2.25 приведен график зависимости полученного управления от времени. На рисунке 2.26, а приведен график зависимости угла поворота исполнительного органа установки от времени; на рисунке 2.26, б — график зависимости скорости поворота от времени; на рисунке 2.26, в — траектория движения системы в пространстве фазовых координат системы; на рисунке 2.26, г — график зависимости ошибки по углу поворота от времени; на рисунке 2.26, д — график зависимости ошибки по скорости поворота от времени и на рисунке 2.26, е — траектория движения системы в пространстве ошибок.
Проведем сравнительную характеристику представленных диаграмм. Из рисунка 2.24 видно, что процесс синхронизации антенн и выход на рабочий режим завершается приблизительно за десять секунд. Из графиков, приведенных рисунках 2.25 – 2.26 можно сделать вывод, что построенная система выходит на рабочий режим, приблизительно, за 1,5 секунды, что, почти, в 6 раз быстрее системы, построенной на основе ПИД-регулятора.
Процесс выхода на рабочий режим завершился с некоторой незначительной ошибкой, которую можно ликвидировать в следующем цикле работы системы оптимального управления. Этот процесс может продолжаться длительное время, поэтому необходимо задавать некоторое предельно допустимое значение ошибки, при котором работа системы будет удовлетворять техническим требованиям, предъявляемым к данной установке.
Таким образом, была смоделирована система управления, обеспечивающая более чем пятикратный выигрыш в быстродействии по сравнению с существующими системами, построенными на основе ПИД-регуляторов.




Практическая реализация
Выбор микроконтроллера
Выбор типа контроллера обуславливается несколькими факторами, а именно: производительностью арифметическо-логического устройства, ёмкостью оперативного запоминающего устройства и постоянного запоминающего устройства, доступностью ПО для создания программ и отладки, а также доступностью на российском рынке.
При создании алгоритма изначально учитывалась его адаптация к применению в микроконтроллерах. Таким образом, был получен алгоритм, основанный лишь на элементарных арифметических операциях, которые не требуют разработки дополнительных библиотек для производимых вычислений. При адаптации к конкретной системе, для данного алгоритма необходимо провести предварительные вычисления — идентификацию установки — для загрузки полученных параметров в микроконтроллер.
В настоящее время большое распространение получила продукция фирм: INTEL, MICROCHIP и ATMEL. Большинство микроконтроллеров MICROCHIP и ATMEL имеют FLASH память программ, что позволяет достаточно просто выполнять отладку программного обеспечения, а также его обновление. Микроконтроллеры ATMEL семейства АТ89 совместимы с семейством MCS-51, которое в настоящее время получило широкое распространение. Для MCS-51 разработаны и доступны библиотеки и системы создания программ и отладки. Среди микроконтроллеров ATMEL семейства АТ89 имеется контроллер AT89S8252, который допускает программирование непосредственно в оборудовании, в котором используется, что особенно удобно на этапе разработки и отладки.
Контроллер AT89S8252 работает с тактовой частотой 24 МГц, что обеспечивает производительность порядка двух миллионов операции в секунду, имеет встроенные операции умножения и деления, 8 Кбайт ПЗУ программ и 256 байт ОЗУ данных. Анализ основных характеристик контроллера AT89S8252 показывает его пригодность для решения задачи, поставленной в данной работе.
Маркетинговая ориентация
На данном этапе разработки можно выбрать следующую маркетинговую ориентацию:
- преимущества у потребителя;
- с подкреплением;
- в реальном исполнении;
- по замыслу.
Ниже характеристики системы слежения РЛС с позиции маркетинга приведены в виде схемы на рисунке 4.1.
| Преимущества у потребителя: Система осуществляет автоматический вывод объекта (ДПТ) на заданную траекторию за минимальное время, а также слежение и отработку с необходимой точностью задающего (наблюдаемого) воздействия. | ||||||
|
| С подкреплением: Узкоспециализированный ПП, используемый для синтеза закона управления объектом (ДПТ), а также моделирования поведения системы под действием полученного оптимального закона управления. |
| ||||
|
| В реальном исполнении: Структурная схема системы управления с набором аналитических выражений для основных управляющих органов объекта (ДПТ). |
| ||||
|
| По замыслу: Автоматический выход на заданные параметры работы объекта за минимальное время. Движение по заданной траектории с установленной точностью. |
| ||||
|
| ||||||
|
| ||||||
| Рисунок 4.1 Маркетинговая ориентация | ||||||
Пояснения к рисунку 4.1:
1) Основной целью создания ПП является автоматизация рабочего места научного сотрудника, а также поддержка принятия решений специалистов различного профиля. В ходе выполнения работы было проведено построение ММ информационной системы как задачи интеллектуальной системы автоматизированного проектирования и моделирования, были исследованы ее характеристики и вычислены некоторые параметры необходимые для практической реализации.
2) В реальном исполнении — это ПО информационной системы, функционально состоящее из структурной схемы системы управления с набором аналитических выражений для основных управляющих органов объекта (ДПТ). Система базируется на весьма распространенном в настоящее время классе ПЭВМ и имеет кросплатформенную реализацию.
3) Использование данного ПО носит специализированный характер: интерфейс пользователя обусловлен используемой программой интерпретатором (MatLab) и предназначен для освоения лицам, ранее работавшим с программой интерпретатором, но, возможно, не являющимися специалистами в области компьютерных технологий.
4) Основными достоинствами данного продукта являются гибкость, уникальность, оптимизация под требования конкретных задачи и заказчика. Система обладает относительно широкой аппаратной независимостью; некоторой программной (платформенной) независимостью (в пределах семейства Unix-подобных систем).
Расчёт затрат на разработку
Основная заработная плата
К этой статье относится заработная плата сотрудников непосредственно связанных с выполнением НИР, а также зарплата сотрудников внештатного состава, привлекаемых к разработке и выполнению НИР.
Таблица 4.3 Заработная плата сотрудников
| Должность | Заработная плата в месяц, руб. | Стоимость одного рабочего дня, руб. |
| Руководитель проекта | 10200 | 510 |
| Разработчик | 5600 | 280 |
Таблица 4.4 Затраты на оплату труда
| Этапы разработки | Исполнитель | Трудоемкость, чел. /день | Оплата работникам руб./день | Примечание |
| 1. Постановка задачи | руководитель проекта | 1 | 510 | |
| 2. Разработка структурной схемы устройства | руководитель проекта, разработчик | 5 | 2550 1400 | |
| 3. Выбор электрических схем согласно структурной схеме | разработчик | 10 | 2800 | |
| 4. Разработка схемы электрической принципиальной | разработчик | 6 | 1680 | |
| 5. расчёт элементов схемы электрической принципиальной | разработчик | 7 | 1960 | |
| 6. Составление перечня элементов | разработчик | 3 | 840 | |
| Итого | 2 человека | 32 | 11740 |
Таким образом основная заработная плата составляет:
Зо= 11740 руб.
Накладные расходы
Таблица 4.5 Накладные расходы
| Наименование затрат | Количество, шт. | Стоимость, руб. |
| Канцелярские товары: бумага формата А1 ; бумага формата А4: тетрадь общая; карандаш; ластик; ручка; прочие затраты. | 3 100 1 3 2 3 | 20 100 10 10 8 5 70 |
| Единовременные затраты: ЭВМ. | 1 | 400 |
| Итого | 701 |
Накладные расходы:
Рн= 701 руб.
Затраты на проектирование составляют:
Зпр= Зо + Зд + Осс + Рн;
Зпр = 11740 + 1408,8 + 4799,3 + 701 = 18649,1 руб.
Затраты на эксплуатацию
Таблица 4.8 Структура затрат на производство
| Наименование затрат по экономическим элементам | Величина затрат % | Величина затрат руб. |
| 1 . Материальные затраты 2. Заработная плата 3. Отчисления на социальное страхование 4. Энергоресурсы 5 . Амортизационные отчисления 6. Ремонтный фонд оборудования 7. Прочее | 44 30 40% от ЗП 8 9 7 2 | 1996,3 1361 544,4 363 408,3 317,6 90,75 |
| Итого | 100 | 4537 |
Таблица 4.9 Расчёт общих затрат
| Наименование затрат | Стоимость, руб. |
| 1. Затраты на проектирование Зпр 2. Затраты на опытный образец 3об 3. Затраты на маркетинг Зм (10% от Зоб) | 18649,1 1685 168,5 |
| Суммарные затраты по проекту | 20502,6 |
4.4.4 Ценообразование
Цена проекта, определяется себестоимостью и прибылью, которая в свою очередь составляет 10% от себестоимости. Себестоимость равна величине затрат на производство. Таким образом:
Цена проекта = себестоимость + % рентабельности;
Цпр= 4537 + 0,1*4537 = 4990,7 руб.
Примем цену продажи равной Цпр = 4990 руб.
Затраты в оборотные средства на создание запаса комплектующих и незавершённого производства:
Oc = C*Ncp,
где С — себестоимость; Ncp — среднеквартальный выпуск изделий в 1-м полугодии планируемого периода;
Ос= 4990*17.5 = 87325 руб.
Округленно, потребность в основном капитале определена в сумме 20500 руб.; в оборотном капитале — 87300 руб.
Таким образом, общая потребность в инвестициях определена в размере 107800 руб.
Выводы
Проведенный расчет показал перспективность проводимой научной разработки. Коэффициенты научной результативности и научно-технической результативности показали, что результаты выполняемых исследований могут быть использованы и в других НИР или ОКР. Иными словами масштабы реализации и применения результатов данной НИР велики. Что касается завершенности полученных результатов, то хотелось бы отметить следующее. В данной НИР решена основная задача слежения — движение по заданной траектории, но полноценность решения задачи зависит от каждого частного случая.
Помещения и их освещение
Помещения, в которых располагаются автоматизированные рабочие места (АРМ), должны отвечать требованиям, предъявляемым к освещению и условиям микроклимата.
Площадь на одно рабочее место с ВДТ или ПЭВМ для пользователей должна составлять не менее 6,0 кв. м, а объем — не менее 20,0 куб. м.
Производственные помещения, в которых для работы используются преимущественно ВДТ и ПЭВМ не должны граничить с помещениями, в которых уровни шума и вибрации превышают нормируемые значения (механические цеха, мастерские, гимнастические залы и т.п.).
Звукоизоляция ограждающих конструкций помещений с ВДТ и ПЭВМ должна отвечать гигиеническим требованиям и обеспечивать нормируемые параметры шума согласно требованиям раздела 6 СанПиН 2.2.2.542-96.
Поверхность пола в помещениях эксплуатации ВДТ и ПЭВМ должна быть ровной, без выбоин, нескользкой, удобной для очистки и влажной уборки, обладать антистатическими свойствами.
Правильная организация освещения производственных участков является одним из важнейших факторов предотвращения травматизма и профессиональных заболеваний. Для этого необходимо учитывать яркость источников света, их расположение в помещении, яркостной контраст между устройствами ЭВМ и фоном, качество и цвета светильников и поверхностей.
Рабочие места должны располагаться в помещениях, где применяется как естественное, так и искусственное освещение, причем искусственное освещение применяется не только в темное, но и в светлое время суток. Запрещается расположение АРМ в подвальных помещениях.
Искусственное освещение в помещении следует осуществлять в виде комбинированной системы освещения с использованием люминесцентных источников света в светильниках общего освещения.
В помещении должна быть обеспечена равномерная освещенность, что достигается преимущественно отраженным или рассеянным светораспределением. Осветительные установки не должны создавать слепящих бликов на клавиатуре, а также на экране видеотерминала в направлении глаз оператора.
Существует три вида систем освещения: прямая, отраженная и диффузная. При прямом освещении почти весь свет от источников попадает прямо на рабочие поверхности, что вызывает резкую контрастность, блесткость и резкие тени. При освещении отраженным светом его лучи направляются на потолок и верхнюю часть стен, а уже от них равномерно отражается по всему помещению, не создавая ярких бликов и резких теней. Диффузное освещение является средним между прямым и отраженным по параметрам блесткости и образования теней, однако является наименее энергозатратным. Наиболее приемлемым в нашем случае является применение системы отраженного света.
Освещенность поверхности стола в зоне размещения рабочего документа должна составлять 300–500 лк. Для малой и средней контрастности поверхностей ЭВМ при темном фоне наименьший уровень освещенности должен составлять 150 лк, для большой контрастности — 100 лк.
Для внутренней отделки интерьера помещений с ВДТ и ПЭВМ предлагается использовать диффузно-отражающие материалы с коэффициентом отражения для потолка — 0,7–0,8; для стен — 0,5–0,6; для пола — 0,3–0,5.
Помещение должно быть оснащено аптечкой первой медицинской помощи и удовлетворять Нормам пожарной безопасности НПБ 105-95 и ГОСТ 12.1.004-91.
Уровень шума и вибрация
При выполнении основной работы на ВДТ и ПЭВМ уровень шума на рабочем месте не должен превышать 50 дБА (приложение 19, п.2.7 СанПиН 2.2.2.542-96).
В помещениях, где работают инженерно-технические работники, осуществляющие лабораторный, аналитический или измерительный контроль, уровень шума не должен превышать 60 дБА.
В помещениях операторов ЭВМ (без дисплеев) уровень шума не должен превышать 65 дБА.
На рабочих местах в помещениях для размещения шумных агрегатов вычислительных машин (АЦПУ, принтеры и т.п.) уровень шума не должен превышать 75 дБА (Приложение 7 СанПиН 2.2.2.542-96).
При выполнении работ с ВДТ и ПЭВМ в производственных помещениях уровень вибрации не должен превышать допустимых значений согласно "Санитарным нормам вибрации рабочих мест" (категория 3, тип "в", приложения 8 и 19, п.2.8 СанПиН 2.2.2.542-96).
Шумящее оборудование (АЦПУ, принтеры и т.п.), уровни шума которого превышают нормированные, предлагается располагать вне помещения с ВДТ и ПЭВМ.
Снизить уровень шума в помещениях с ВДТ и ПЭВМ можно использованием звукопоглощающих материалов с максимальными коэффициентами звукопоглощения в области частот 63 – 8000 Гц для отделки помещений (разрешенных органами и учреждениями Госсанэпиднадзора России), подтвержденных специальными акустическими расчетами.
Дополнительным звукопоглощением могут служить однотонные занавеси из плотной ткани, гармонирующие с окраской стен и подвешенные в складку на расстоянии 15-20 см от ограждения. Ширина занавеси должна быть в 2 раза больше ширины окна.
Параметры микроклимата
Независимо от состояния природных метеорологических условий данной местности в дисплейных производственных помещениях и на рабочих местах должны быть созданы климатические условия (производственный микроклимат) наиболее благоприятные для выполнения заданной работы. Климатические условия определяются сочетанием температуры, влажности и скорости перемещения воздуха, а также температуры окружающих поверхностей.
В производственных помещениях, в которых работа на ВДТ и ПЭВМ является основной, должны обеспечиваться оптимальные параметры микроклимата (приложение 4 СанПиН 2.2.2.542-96).
Уровни положительных и отрицательных аэроионов в воздухе помещений с ВДТ и ПЭВМ должны соответствовать нормам, приведенным в приложении 6; 19 (п.2.3) СанПиН 2.2.2.542-96.
Содержание вредных химических веществ в производственных помещениях, работа на ВДТ и ПЭВМ в которых является основной, не должно превышать "Предельно допустимых концентраций загрязняющих веществ в атмосферном воздухе населенных мест" (приложение 19, п.2.5 СанПиН 2.2.2.542-96).
Благоприятными условиями газового состава воздуха считается содержание кислорода 19-20%, углекислого газа около 1%; допустимые значения, при которых не происходит выраженного снижения работоспособности составляют: кислорода — 18–29%, углекислого газа — 1-2%. Снижение содержания кислорода ниже 16% и повышение содержания углекислого газа выше 3% являются недопустимыми и могут привести к нежелательным последствиям.
При контроле микроклимата на рабочих местах с дисплеями должны проводиться измерения температуры, относительной влажности и скорости движения воздуха в начале, середине и конце холодного и теплого периода года не менее трех раз в смену (в начале, середине и конце) специальными измерительными приборами.
Для повышения влажности воздуха в помещениях с ВДТ и ПЭВМ следует применять увлажнители воздуха, заправляемые ежедневно дистиллированной или прокипяченной питьевой водой.
Помещения с ВДТ и ПЭВМ должны оборудоваться системами отопления, кондиционирования воздуха или эффективной приточно-вытяжной вентиляцией. Расчет воздухообмена следует проводить по теплоизбыткам от машин, людей, солнечной радиации и искусственного освещения.
Электробезопасность
Практически все оборудование вычислительных центров относится к электрическим установкам, которые представляют собой большую потенциальную опасность.
Персональный компьютер питается напряжением 220В/50Гц, которое превышает безопасный предел 42 В. Следовательно возникает опасность поражения электрическим током.
Воздействие на человека электрического тока приводит к общим травмам (электроудары) и местным (ожоги, металлизация кожи, электрические знаки, электроофтальмия, механические повреждения). Опасность прикосновения человека к токоведущим частям электроустановки определяется величиной протекающего через тело человека тока.
Как показывает анализ случаев электротравматизма, чаще всего встречается однофазное прикосновение в изолированных и глухо-заземленных сетях.
Для предотвращения электротравматизма недостаточно только организационных мер; здесь требуются также технические меры: защитное заземление, зануление, защитное отключение и т. д.
Специфическая опасность электроустановок: токоведущие проводники, корпуса стоек ЭВМ и прочего оборудования, оказавшегося под напряжением в результате повреждения (пробоя) изоляции, не подают каких-либо сигналов, которые предупреждают человека об опасности. Реакция человека на электрический ток возникает лишь при протекании последнего через тело человека. Исключительное значение для предотвращения электротравматизма имеет правильная организация обслуживания действующих электроустановок, проведения ремонтных, монтажных и профилактических работ. При этом под правильной организацией понимается строгое выполнение ряда организационных и технических мероприятий и средств, установленных действующими “Правилами технической эксплуатации электроустановок потребителей и правила техники безопасности при эксплуатации электроустановок потребителей” (ПТЭ и ПТБ потребителей) и “Правила установки электроустановок” (ПУЭ).
Разрядные токи статического электричества чаще всего возникают при прикосновении к любому из элементов ЭВМ. Такие разряды особой опасности для человека не представляют, но кроме неприятных ощущений они могут привести к выходу из строя ЭВМ. Для снижения величины возникающих зарядов статического электричества покрытие технологических полов следует выполнять из однослойного поливинилхлоридного антистатического линолеума.
Другим методом защиты является нейтрализация заряда статического электричества ионизированным газом. В промышленности широко применяются радиоактивные нейтрализаторы. К общим мерам защиты от статического электричества можно отнести общее и местное увлажнение воздуха.
Установка и монтаж оборудования АРМ должно осуществляться в соответствии с Правилами установки электрооборудования ПУЭ-85 и ГОСТ 12.3.032-84.
Требования к организации режима труда и отдыха при работе на АРМ
Режимы труда и отдыха при работе с АРМ необходимо организовывать в зависимости от вида и категории трудовой деятельности.
Продолжительность обеденного перерыва определяется действующим законодательством о труде и Правилами внутреннего трудового распорядка предприятия.
Для обеспечения оптимальной работоспособности и сохранения здоровья оператора АРМ, на протяжении рабочей смены рекомендуется устанавливать регламентированные перерывы.
Время регламентированных перерывов в течение рабочей смены следует устанавливать в зависимости от ее продолжительности, вида и категории трудовой деятельности (приложение 15 СанПиН 2.2.2. 542-96).
Продолжительность непрерывной работы с АРМ без регламентированного перерыва не должна превышать 2 часов.
При работе с АРМ в ночную смену (с 22:00 до 6:00 часов), независимо от категории и вида трудовой деятельности, продолжительность регламентированных перерывов необходимо увеличить на 60 минут.
Во время регламентированных перерывов с целью снижения нервно-эмоционального напряжения, утомления зрительных анализаторов, предотвращения познотонического утомления целесообразно выполнять комплексы упражнений, изложенные в Приложении 16-18 СанПиН 2.2.2. 542-96.
С целью уменьшения отрицательного влияния монотонии целесообразно применять чередование операций осмысленного текста и числовых данных, чередование редактирования текста и ввода данных (изменение содержания работы).
В случаях возникновения у работающих с АРМ зрительного дискомфорта и других неблагоприятных субъективных ощущений, несмотря на соблюдение санитарно-гигиенических, эргономических требований, режимов труда и отдыха, необходимо проводить коррекцию длительности перерывов для отдыха или смену деятельности на другую, не связанную с использованием АРМ.
Работающим на АРМ с высоким уровнем напряженности во время регламентированных перерывов и в конце рабочего дня показана психологическая разгрузка в специально оборудованных помещениях (комната психологической разгрузки).
Комплексная реализация проекта в форме АРМ с учетом сформулированных выше требований охраны труда гарантирует обеспечение безопасных и безвредных условий труда персонала в соответствии с ССБТ, другими действующими трудоохранными нормами и правилами.
Экологичность проекта
Экологичность производства — это комплексная характеристика, отражающая уровень ресурсных затрат на производство единицы востребованной потребителями товаров, работ и услуг.
Данный программный продукт предназначен для получения рабочих параметров математической модели, которые в дальнейшем могут быть использованы для настройки реальных электронных устройств слежения и управления (УСиУ) на основе двигателей постоянного тока (ДПТ). Таким образом, данный проект не связан с потенциально вредным производством и не угрожает экологической обстановке окружающей среды. Но благодаря данной разработке и при условии внедрения ее в производство, уровень энергозатрат снизится, что, в свою очередь, повысит экологичность данного производства.
Выводы
Анализ проектного решения на устойчивость к(в) ЧС показал, что и АРМ, и регулируемое производство при соблюдении установленных требований и правил не представляет опасности при возникновении ЧС различного характера.
В проекте были предусмотрены ряд дополнительных мер, направленных на обеспечение безопасности и комфортности работы на автоматизированном рабочем месте (АРМ), а также в производстве.
Таким образом, проанализировав все факторы, с уверенностью можно сказать, что внедрение данной разработки в производство обеспечивает требуемый уровень трудоохранных мер, при условии проведения всех указанных мероприятий и соблюдении норм и требований; повысит совокупную экологичность хозяйственной деятельности за счет снижения энергозатрат, и не будет сопровождаться снижением устойчивости при возникновении вероятностных ЧС.
Заключение
Целью данной работы ставилось создание математической модели системы слежения РЛС.
Для построения данной системы использовался принцип максимума Понтрягина. [1] В работе описаны основные принципы функционирования системы оптимального управления, был смоделирован привод антенны на основе экспериментальных данных, полученных при проведении исследований динамических характеристик и параметров привода РЛС в ООО НПО «Горизонт» [3].
В работе разработан общий алгоритм функционирования, на основе которого получены данные для смоделированного привода РЛС. Для сравнительной характеристики была взята система регулирования привода РЛС, построенная на основе ПИД-регулятора. В результате анализа полученных данных установлено, что смоделированная система дает выигрыш в быстродействии более чем в пять раз, по сравнению с существующей системой.
Полученная система адаптирована для применения в микроконтроллерах, что придает ей гибкость и простоту в модификации. Таким образом, данная система является более быстродействующей и удобной для применения по сравнению с существующими аналогами, построенными на основе стандартных регуляторов.
Приложение
Блок-схема файл-функции OPTIMUM_CONTR
Блок-схема общего алгоритма функционирования программы.

Блок-схема подпрограммы u_calc().

| № строки | Формат | Обозначение | Наименование | Кол. листов | № экз. | Примечание |
| Документация | ||||||
| 1 | А4 | 2101.770000.000ПЗ | Пояснительная записка | 1 | ||
| Прочая документация | ||||||
| 2 | А1 | 2101.770000.000Д1 | 1 | 1 | ||
| 3 | А1 | 2101.770000.000Д2 | 1 | 1 | ||
| 4 | А1 | 2101.770000.000Д3 | 1 | 1 | ||
| 5 | А1 | 2101.770000.000Д4 | 1 | 1 | ||
| 6 | А1 | 2101.770000.000Д5 | 1 | 1 | ||
| 7 | А1 | 2101.770000.000Д6 | 1 | 1 | ||
Содержание
Содержание. 1
Введение. 3
1 Общая теория оптимального управления. 6
1.1 Допустимые управления. 6
1.2 Основные направления в теории оптимальных процессов. 11
1.2.1 Метод динамического программирования. 12
1.2.2 Принцип максимума. 13
1.3 Программное управление. 16
1.4 Постановка задачи и способы решения. 18
2 Система оптимального управления. 24
2.1 Математическое описание электромеханической системы.. 24
2.2 Идентификация авторегрессионно-регрессионной модели. 29
2.3 Формирование ограничений. 37
2.4 Формирование оптимальных траекторий. 42
2.5 Анализ решений. 50
2.6 Общая структура системы оптимального управления. 55
2.7 Полученные результаты.. 58
3 Практическая реализация. 63
3.1 Реализация оптимального управления в среде пакета matlab. 63
3.2 Выбор микроконтроллера. 64
4 Экономическое обоснование проекта. 66
4.1 Технико-экономическая характеристика. 66
4.2 Маркетинговая ориентация. 66
4.3 оценка научно-технической результативности и социальной эффективности НИР 68
4.4 Производственный план. 74
4.4.1 Расчёт затрат на разработку. 75
4.4.2 Затраты на создание опытного образца. 77
4.4.3 Затраты на эксплуатацию.. 79
4.4.4 Ценообразование. 79
Выводы.. 80
5 Безопасность и экологичность проекта. 81
5.1 Анализ опасных и вредных факторов. 82
5.2 Мероприятия по улучшению условий труда. 83
5.2.1 Помещения и их освещение. 83
5.2.2 Уровень шума и вибрация. 85
5.2.3 Параметры микроклимата. 86
5.2.4 Защита от электромагнитных и электростатических полей. 87
5.2.5 Электробезопасность. 90
5.2.6 Дисплейные терминалы и ПЭВМ в составе АРМ.. 91
5.2.7 Организация и оборудование рабочих мест с ВДТ и ПЭВМ.. 93
5.2.8 Требования к организации режима труда и отдыха при работе на АРМ.. 95
5.3 Устойчивость проекта к чрезвычайным ситуациям. 97
5.4 Экологичность проекта. 98
5.5 Выводы.. 99
Заключение. 100
Приложение. 101
Блок-схема файл-функции OPTIMUM_CONTR.. 101
Введение
Во многих областях техники и технологии приходится иметь дело со следующей задачей, которую можно трактовать как задачу «сопровождения цели». Причем, наблюдаемый процесс в некоторых случаях является детерминированным, т.е. полностью определенным, а в некоторых — не известным, но и в том и в другом случае в нем присутствует шум — случайная составляющая. Заданием для управляемого объекта служит движение другого объекта — задающего. Таким образом, задача слежения сводится к задаче перевода системы из начального состояния в наперед заданное состояние, которое определяется фазовым состоянием наблюдаемой системы.
В начальный момент времени t0 объект находится в фазовом состоянии x0; требуется выбрать такое управление u( t), которое переведет объект в заранее заданное конечное фазовое состояние x1 (отличное от x0). При этом нередко бывает, что начальное состояние x0 заранее неизвестно.
Такое управление часто осуществляется человеком (оператором), который следит за приборами и старается выбирать управление, поддерживающее объект в требуемом рабочем режиме.
Однако в современных условиях высокого развития техники оператор зачастую не может успешно справиться с этой задачей ввиду сложности поведения объекта, большой быстроты протекания процессов и т. п. Поэтому чрезвычайно важно создать такие приборы, которые сами, без участия человека, управляли бы работой объекта (например, в случае выхода объекта из рабочего состояния возвращали бы его в это рабочее состояние). Такие приборы сейчас очень распространены в технике, их изучением занимается теория автоматического управления.
В общем случае на вход регулятора подаются фазовые координаты объекта. Регулятор конструируется так, что его выходная величина u, поданная на вход объекта, нужным образом управляет работой объекта (т. е., например, возвращает объект в рабочее состояние, если он почему-либо вышел из этого состояния).
Обычно требуется, чтобы переходный процесс (т. е. процесс перехода из начального фазового состояния x0 в предписанное конечное состояние x1) был в определенном смысле «наилучшим», например, чтобы время перехода было наименьшим или чтобы энергия, затраченная в течение переходного процесса, была минимальной и т. п. Такой «наилучший» переходный процесс называется оптимальным процессом.
Разумеется, желательно, чтобы регулятор не просто возвращал объект в рабочее состояние, а делал это наилучшим образом, например, в смысле быстродействия (т.е. возвращал объект в рабочее состояние за кратчайшее время). В связи с этим в теории автоматического управления рассматриваются весьма различные (по устройству и степени сложности) регуляторы. Рассмотрение регуляторов, которые применялись на практике и изучались в руководствах по автоматическому регулированию до возникновения теории оптимальных процессов, приводит к выводу, что уменьшение времени переходного процесса связано с усложнением конструкции регулятора; поэтому, усложняя конструкцию регулятора, можно лишь приближаться к «идеальному», «оптимальному» регулятору, который во всех случаях осуществляет переходный процесс за кратчайшее время.
Одной из важных заслуг теории оптимальных процессов является установление существования оптимальных регуляторов и создание математического аппарата, позволяющего рассчитывать такие регуляторы. Оптимальные регуляторы существенно отличаются от тех, которые до сих пор изучались в теории автоматического управления.
На данном уровне развития техники и технологии для такого рода управления в большинстве случаев используются стандартные регуляторы (например, ПИД-регуляторы). Во многих случаях их применение может быть оправдано и их работа удовлетворяет поставленным целям управления, но существуют ситуации, в которых применение таких регуляторов не дает необходимого результата. Использование ПИД-регуляторов может оказаться нецелесообразным в случае ограничений на управление. В такой ситуации, система в целом оказывается существенно нелинейной и классические приемы управления в этом случае не приемлемы.
В данной работе рассматривается система, состоящая из двух электроприводов, один из которых является ведущим, а другой — ведомым. Ведомый двигатель должен двигаться синхронно с ведущим. Система должна отрабатывать заданную траекторию с необходимой точностью и максимальным быстродействием.
Общая теория оптимального управления
Допустимые управления
Наиболее перспективным решением экстремальных задач является их решение на основе теории принципа максимума Понтрягина. В данной работе ставилась задача оптимизации по времени, для чего и были использованы методы оптимального управления, предложенные Л.С. Понтрягиным, В.Г. Болтянским, Р.В. Гамкрелидзе. [1]
Задача оптимального быстродействия заключается в отыскании такого управления u( t), для которого фазовая траектория x( t) проходит через точку x1 и переход из х0 в х1 осуществляется за кратчайшее время. Такое управление u( t) называется оптимальным управлением (в смысле быстродействия); точно так же соответствующую траекторию x( t), по которой фазовая точка за кратчайшее время переходит из состояния x0 в состояние x1 называется оптимальной траекторией.
Обычно управляющие параметры u1,..., ur не могут принимать совершенно произвольные значения, а подчинены некоторым ограничениям. Это обусловлено техническими характеристиками реальных объектов управления, а также конструкцией регулирующих устройств.
Например, для двигателя постоянного тока (ДПТ), одним из управляющих параметров служит напряжение якоря; однако именно в силу конструктивных особенностей ДПТ этот параметр подчинен ограничениям указанного типа. Так, значение этого параметра не может принимать сколь угодно большое значение.
Для объекта, содержащего r управляющих параметров u1, u2, ..., ur, в приложениях часто встречается случай, когда эти параметры могут произвольно меняться в следующих пределах:
Т. е. каждая из величин u1, u2, ..., ur представляет собой отдельный управляющий параметр, область изменения которого не зависит от значений остальных управляющих параметров и задается неравенствами
(1.1)
Заметим, что при r = 2 точки , координаты которых подчинены неравенствам (1.1), заполняют прямоугольник (рисунок 1.1); при r = 3 неравенства (1.1) определяют в пространстве переменных u1, u2, u3 прямоугольный параллелепипед.
В общем случае будем считать, что в соответствии с конструкцией объекта и условиями его эксплуатации задано в пространстве переменных u1, ..., ur некоторое множество U и управляющие параметры u1, u2, ..., ur должны в каждый момент времени принимать лишь такие значения, чтобы точка принадлежала множеству U. Т. е. разрешается рассматривать лишь такие управления u( t), что для любого t. Множество U называется областью управления.
Область управления U, в общем случае, может быть не только параллелепипедом, но может иметь более или менее геометрически сложный характер, так как благодаря конструкции объекта между управляющими параметрами могут существовать некоторые связи, выражаемые некоторыми уравнениями или неравенствами. Указанные области управления должны входить в математическое описание объекта.
Для технических задач важен случай замкнутого множества U, т.е. случай, когда точка может находиться не только внутри множества, но и на его границе. Т.е. для «рулей» допустимы и их крайние положения.
Для полного осмысления данного вопроса необходимо сделать еще одно, очень важное, предположение о характере управлений. Возможны несколько случаев представления управляющих воздействий. А именно, в одном случае, когда это позволяет точность представления, можно предполагать, что «рули», положения которых характеризуются управляющими параметрами u1, u2, ..., ur, безынерционны, так что есть возможность, если нужно, мгновенно переключать эти «рули» из одного положения в другое, т. е. менять скачком значения управляющих параметров u1, u2, ..., ur в пределах области управления.
В другом случае, когда точность расчетов не допускает таких приближений нужно предполагать, что управляющие воздействия не могут меняться скачкообразно на сколь угодно большую величину, т.е. существует ограничение не только на значение управляющего параметра, но и на скорость изменения этого параметра. В этом случае достаточно написать , где — скорость изменения управляющего параметра, и принять за управляющий параметр величину . Т. о. существует ограничение вида
(1.2)
что несколько осложняет поиск оптимального управления.
Всякий реальный процесс обладает некоторой «инерционностью», но во всяком реальном управляемом объекте всегда можно найти такие управляющие параметры, которые, в пределах заданной точности, можно считать безынерционными.
В соответствии с этим будут рассматриваться не только непрерывные, но и кусочно-непрерывные управления u( t). Класс кусочно-непрерывных управлений хорош тем, что, во-первых, позволяет получить точное математическое решение оптимальной задачи для широкого класса примеров, а во-вторых, наиболее интересен и удобен для технической реализации.
Необходимо уточнить, что функция со значениями в области управления U называется кусочно-непрерывной, если она состоит из конечного числа непрерывных кусков (рисунок 1.2), т.е. непрерывна для всех рассматриваемых t, за исключением лишь конечного числа моментов времени, где функция u( t) может терпеть разрывы первого рода; последнее означает, что в каждой точке разрыва t предполагается существование конечных пределов слева и справа:
Значение кусочно-непрерывного управления u( t) в точке разрыва не играет сколько-нибудь существенной роли. Однако для определенности будет удобно предполагать, что управление u( t) в точках разрыва непрерывно справа, т. е. что в каждой точке разрыва t значение управления u( t) равно пределу справа:
Кроме того, предполагается, что каждое рассматриваемое управление u( t) непрерывно в концах отрезка на котором оно задано, т. е. что все его точки разрыва, если они есть, расположены на интервале .
Допустимым управлением называют всякую кусочно-непрерывную функцию со значениями в области управления U, непрерывную справа в точках разрыва и непрерывную в концах отрезка на котором она задана.
Оптимальные управления оказываются, в большинстве случаев, разрывными (т.е. содержащие скачки и переключения). Если разрывная функция, график которой изображен на рисунке 1.3 сплошной линией, представляет собой оптимальное управление, то, «сгладив» эту функцию (пунктир на рисунке 1.3), будет получена близкая к ней непрерывная функция. Но какая бы «близкая» к оптимальному управлению непрерывная функция ни была, всегда можно выбрать «сглаживающий» кусок еще более крутым и получить непрерывную функцию, еще более близкую к оптимальному управлению. Таким образом, в классе непрерывных функций просто не будет наилучшего, оптимального управления, а предельным случаем является кусочно-непрерывная функция, которая и является оптимальным управлением.
Дата: 2019-07-24, просмотров: 245.