Полосовая модель процесса обнаружения, рассмотренная в данной главе, практически идентична узкополосной модели, представленной в главе демодуляция и обнаружение. Дело в том, что принятый полосовой сигнал вначале преобразовывается в узкополосный, после чего наступает этап окончательного обнаружения. Для линейных систем математика процесса обнаружения не зависит от смешения частоты. Фактически теорему эквивалентности можно определить следующим образом: выполнение полосовой линейной обработки сигнала с последующим наложением сигнала (превращением полосового сигнала в узкополосный) дает те же результаты, что и наложение сигнала с последующей узкополосной линейной обработкой сигнала. Термин "наложение сигнала" (heterodyning) обозначает преобразование частоты или процесс смешивания, вызывающий смещение спектра сигнала. Как следствие теоремы эквивалентности, любая линейная модель обработки сигналов может использоваться для узкополосных сигналов (что предпочтительнее с точки зрения простоты) с теми же результатами, что и для полосовых сигналов. Это означает, что производительность большинства цифровых систем связи часто можно описать и проанализировать, считая канал передачи узкополосным.
Согласованный фильтр
Согласованный фильтр (matched filter) - это линейное устройство, спроектированное, чтобы давать на выходе максимально возможное для данного передаваемого сигнала отношение сигнал/шум. Предположим, что на вход линейного, инвариантного относительно времени (принимающего) фильтра, за которым следует устройство дискретизации (рисунок 4.2), подастся известный сигнал s(t) плюс шум AWGN n(t).
Межсимвольная интерференция
На рисунке 4.3 а) представлены фильтрующие элементы типичной системы цифровой связи. В системе - передатчике, приемнике и канале - используется множество разнообразных фильтров (и реактивных элементов, таких как емкость и индуктивность). В передатчике информационные символы, описываемые как импульсы или уровни напряжения, модулируют импульсы, которые затем фильтруются для согласования с определенными ограничениями полосы. В узкополосных системах канал (кабель) имеет распределенное реактивное сопротивление, искажающее импульсы. Некоторые полосовые системы такие, как беспроводные, являются, по сути, каналами с замираниями, которые проявляют себя как нежелательные фильтры, также искажающие сигнал. Если принимающий фильтр настраивается на компенсацию искажения, вызванного как передатчиком, так и каналом, он зачастую называется выравнивающим (equalizing filter) или принимающим/выравнивающим (receiving/equalizing). На рисунке 4.10,б приведена удобная модель системы, объединяющая следствия фильтрации в одну общесистемную передаточную функцию.
 (4.40)
(4.40)
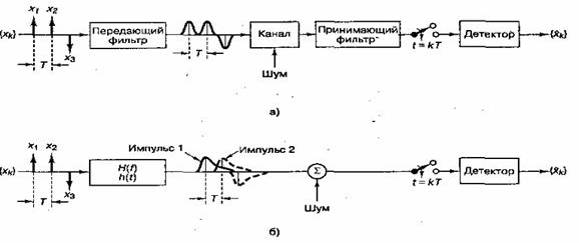
Рисунок 4.3 - Межсимвольная интерференция в процессе обнаружения:
а) типичная узкополосная цифровая система;
б) эквивалентная модель.
Дата: 2019-12-22, просмотров: 233.