ТЕХНОЛОГИИ ЦИФРОВОЙ СВЯЗИ
Конспект лекций
для студентов всех форм обучения специальности 050719 – Радиотехника, электроника и телекоммуникации
Алматы 2008
СОСТАВИТЕЛИ: К.С.Чежимбаева, Д.А.Абиров. Технологии цифровой связи. Конспект лекций для студентов всех форм обучения специальности 050719 – Радиотехника, электроника и телекоммуникации.- Алматы: АИЭС, 2008.- 61с.
Конспект лекций посвящен вопросам элементов систем цифровой связи, каналам связи и их характеристикам, узкополосной передаче, методам цифровой модуляции, методам синхронизации, методам и устройствам помехоустойчивого кодирования, принципам применение системы связи с обратной связью и применению эффективного кодирования для сжатия данных, которые необходимы при изучении дисциплин, связанных с этой тематикой. Конспект лекций предназначен для студентов всех форм обучения по специальности 050719 – Радиотехника, электроника и телекоммуникации.
Содержание
Введение
1 Лекция №1. Элементы систем цифровой связи
1.1 Функциональная схема и основные элементы цифровой системы
2 Лекция №2. Каналы связи и их характеристики
2.1 Понятие каналов связи
2.2 Проводные каналы
2.3 Волоконно-оптические каналы
2.4 Беспроводные (радио) каналы
3 Лекция №3. Математические модели каналов связи
3.1 Математические модели каналов связи
4 Лекция №4. Узкополосная передача
4.1 Демодуляция и обнаружения
4.2 Обнаружение сигнала в гауссовом шуме
4.3 Согласованный фильтр
4.4. Межсимвольная интерференция
5 Лекция №5. Алгоритмы цифрового кодирования
5.1 Алгоритмы цифрового кодирования
5.2 Биполярный метод
5.3 Псевдотроичный метод
5.4 Парно – селективный троичный код
6 Лекция №6. Полосовая модуляция и демодуляция
6.1 Методы цифровой полосовой модуляции
6.2 Многопозиционная модуляция
6.3 Амплитудная манипуляция
7 Лекция №7 Оптимальный прием ДС сигнала
7.1 Оптимальный прием ДС сигнала
8 Лекция №8 Спектральные характеристики модулированных колебаний
8.1 Спектральные характеристики модулированных колебаний
8.2 Оптимальный приемник
8.3 Когерентный и некогерентный прием
8.4 Цифровой согласованный фильтр
8.5 Оценка помехоустойчивости модулированных сигналов
9 Лекция №9. Методы синхронизации в ЦСС
9.1 Синхронизация в синхронных и асинхронных системах
9.2 Синхронизация поэлементная, групповая и цикловая
10 Лекция №10 Методы и устройства помехоустойчивого кодирования
10.1 Основные принципы обнаружения и исправления ошибок
10.2 Кодовые расстояние и корректирующая способность кода
10.3 Классификация корректирующих кодов
11 Лекция №11.Помехоустойчивые коды и методы декодирования корректирующих кодов
11.1 Коды Рида – Соломона
12 Лекция №12. Системы связи с обратной связью
12.1 Характеристики систем с обратной связью и их особенности
12.2 Структурная схема системы с информационной обратной связью (ИОС) и решающей обратной связью (РОС), характеристики и алгоритмы работы
13 Лекция №13. Сжатие данных в ЦСС
13.1 Алгоритмы сжатия без потерь
Заключение
Список литературы
Введение
В этих конспектах лекции мы представляем основные принципы, которые лежат в основе анализа и синтеза систем цифровой связи. Предмет цифровой связи включает в себя передачу информации в цифровой форме от источника, который создаёт информацию для одного или многих мест назначения. Особенно важным для анализа и синтеза систем связи являются характеристики физических каналов, через которые передаётся информация. Характеристики канала обычно влияют на синтез базовых составных блоков системы связи. Ниже мы опишем элементы системы связи и их функции.
Развитие телекоммуникационных сетей увеличивает роль и значение передачи дискретных сообщений в электросвязи.
Целью дисциплины является изложение принципов и методов передачи цифровых сигналов, научных основ и современное состояние технологии цифровой связи; дать представление о возможностях и естественных границах реализации цифровых систем передачи и обработки, уяснить закономерности, определяющие свойства устройств передачи данных и задачи их функционирования.
Следует отметить, что самая ранняя форма электрической связи, а именно телеграфная связь, была системой цифровой связи. Электрический телеграф был разработан Сэмюэлём Морзе и демонстрировался в 1837 г. Морзе изобрел двоичный код переменой длины, в котором буквы английского алфавита представлены последовательностью точек и тире (кодовые слова). В этом коде часто встречающиеся буквы представлены короткими кодовыми словами, в то время как буквы, встречающиеся менее часто, — более короткими кодовыми словами. Таким образом, код Морзе был предшественником методов кодирования источников кодом переменной длины.
Почти 40 годами позже, в 1875г., Эмиль Бодо изобрёл код для телеграфной связи, в котором каждая буква кодировалась двоичным кодом фиксированной длины 5. В коде Бодо элементы двоичного кода имеют равную длину и именуются посылкой и паузой.
Хотя Морзе принадлежит первая электрическая система цифровой связи (телеграфная связь), начало того, что мы теперь считаем современной теорией цифровой связи, следует из работ Найквиста (1924), исследовавшего проблему определения максимальной скорости передачи, которую можно обеспечить по телеграфному каналу данной ширины полосы частот без межсимвольной интерференции (МСИ). Он сформулировал модель телеграфной системы, в которой передаваемый сигнал имеет общую форму
 (1.1)
(1.1)
где g(t) - базовая форма импульса (несущей); {аn} - последовательность данных в двоичном коде (±1), передаваемых со скоростью 1/Гбит/с.
Найквист пытался определить оптимальную форму импульса g(t) с ограниченной полосой W Гц и максимизировать скорость передачи данных в предположении, что импульс не вызывает МСИ в точках отсчёта kT, k = 0,± 1,±2,... Эти исследования привели его к заключению, что максимальная скорость передачи равна 2W отсч./с. Эту скорость теперь называют скоростью Найквиста. Более того, эту скорость передачи можно достичь при использовании импульса g(t) = sin2πWt/(2πWt). Эта форма импульса допускает восстановление данных без межсимвольных помех в выборочные моменты времени. Результат Найквиста эквивалентен версии теоремы отсчётов для сигналов с Ограниченной полосой, который был позже точно сформулирован Шенноном (1948). Теорема отсчётов гласит, что сигнал с шириной полосы частот W может быть восстановлен по его отсчётам, взятым со скоростью Найквиста 2W, путем использования интерполяционной формулы
 (1.2)
(1.2)
В продолжение работы Найквиста Хартли (1928) рассмотрел вопрос о количестве данных, которые могут быть переданы надежно по каналу с ограниченной полосой частот, когда для последовательной передачи данных используются импульсы со многими амплитудными уровнями. С учетом шума и другой интерференции Хартли показал, что приемник может надежно оценивать амплитуду принятого сигнала с некоторой точностью  . Это исследование привело Хартли к заключению, что имеется максимальная скорость передачи данных по каналу с ограниченной полосой частот, зависящая от максимальной амплитуды сигнала Аmах (фиксированной максимальной мощности) и величины .
. Это исследование привело Хартли к заключению, что имеется максимальная скорость передачи данных по каналу с ограниченной полосой частот, зависящая от максимальной амплитуды сигнала Аmах (фиксированной максимальной мощности) и величины .
Другим значительным вкладом в развитие теории связи была работа Винера (1942), который рассмотрел проблему оценивания полезного сигнала s(f) на фоне аддитивного шума n(f), исходя из наблюдения принимаемого сигнала r(t) = s(t) + n(t) . Эта проблема возникает при демодуляции сигналов. Винер определил линейный фильтр, выход которого является лучшей среднеквадратической аппроксимацией полезного сигнала s(f). Полученный фильтр назван оптимальным линейным (винеровским) фильтром.
Результаты Хартли и Найквиста по максимальной скорости передачи цифровой информации были предшественниками работ Шеннона (1948), который установил математические основы передачи информации по каналам связи и нашел фундаментальные ограничения для систем цифровой связи. В своей пионерской работе Шеннон сформулировал основную проблему надежной передачи информации в терминах статистической теории связи, используя вероятностные модели для информационных источников и каналов связи. Применяя вероятностный подход, он нашёл универсальную логарифмическую меру для количества информации источника. Он также показал, что существует некоторый предельный показатель, характеризующий скорость передачи информации по каналу связи, зависящий от величины мощности передатчика, ширины полосы и интенсивности аддитивного шума, названный им пропускной способностью канала. Например, в случае аддитивного белого (с равномерным спектром) гауссовского шума идеальный частотно-ограниченный канал с шириной полосы W имеет пропускную способность С', бит/с, которая определяется формулой
где Р - средняя мощность сигнала, a nq - спектральная плотность мощности аддитивного шума. Значение параметра пропускной способности канала С' состоит в том, что если информационная скорость (производительность) источника R меньше, чем C'(R < С') , то теоретически возможно обеспечить надёжную (свободную от ошибок) передачу через канал соответствующим кодированием. С другой стороны, если R > С' , то надежная передача невозможна, независимо от способов обработки сигнала на передаче и приеме. Таким образом, Шеннон установил основные ограничения передачи информации и породил новое направление, которое теперь называется теорией информации.
Другой важный вклад в области цифровой связи - это работа Котельникова (1947), который провел тщательный анализ различных систем цифровой связи, основанный на геометрическом представлении.
Исследование Котельникова было позже развито Возенкрафтом и Джекобсом (1965).
Вслед публикациям Шеннона появилась классическая работа Хемминга (1950) по кодам с обнаружением и с исправлением ошибок, которые противодействуют вредному влиянию канального шума. Работа Хемминга стимулировала многих исследователей, которые в последующие годы открыли ряд новых и мощных кодов, многие из которых сегодня внедрены в современные системы связи.
За ранними работами Шеннона, Котельникова и Хемминга появилось много новых достижений в области цифровой связи. Некоторые из наиболее заметных достижений следующие:
разработка новых блоковых кодов Маллером (1954), Ридом (1954) и Соломоном (1960), Боузом и Рой-Чоудхури (1960) и Гоппом (1970)
Данные о дисциплине: Название «Технологии цифровой связи».
По данной дисциплине проводятся лекционные и практические занятия, проводятся лабораторные работы, кроме того, предполагается выполнение курсовая работа, собирается схема с применением пакета «System View» для моделирования телекоммуникационных систем, кодирующего и декодирующего устройства циклического кода с использованием модуляции и демодуляции и проведение самостоятельных работ с целью углубления общих знаний теории.
| Кредиты | Курс | Семестр | Лекции | Практические занятия | Лаборат. работы | Курсовой проект | Экзамен |
| 3 | 3 | 6 | 1.5 (26час.) | 1 (17 час.) | 0.5 (17 час.) | 6 | 6 |
Цифровые сигналы
Цифровой сигнал, описываемый уровнем напряжения или тока,-сигнал (импульс - для узкополосной передачи или синусоида - для полосовой передачи), представляющий цифровой символ. Характеристики сигнала (для импульсов - амплитуда, длительность и расположение или для синусоиды - амплитуда, частота и фаза) позволяют его идентифицировать как один из символов конечного алфавита. На рис. 2.2 приведен пример полосового цифрового сигнала. Хотя сигнал является синусоидальным и, следовательно, имеет аналоговый вид, все же он именуется цифровым, поскольку кодирует цифровую информацию. На данном рисунке цифровое значение указывается посредством передачи в течение каждого интервала времени Т сигнала определенной частоты.
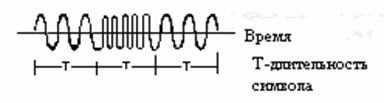
Рисунок. 1.2 - Полосовой цифровой сигнал
Скорость передачи данных. Эта величина в битах в секунду (бит/с) дается формулой R = k/T=(1/T) log2M (бит/с), где к бит определяют символ из М=2к-символьного алфавита, а Т-это длительность κ-битового символа.
Классификация сигналов. Сигнал можно классифицировать как детерминированный (при отсутствии неопределенности относительно его значения в любой момент времени) или случайный, в противном случае. Детерминированные сигналы моделируются математическим выражением x(t) = 5 cos10t. Для случайного сигнала такое выражение написать невозможно. Впрочем, при наблюдении случайного сигнала (также называемого случайным процессом) в течение достаточно длительного периода времени, могут отмечаться некоторые закономерности, которые можно описать через вероятности и среднее статистическое. Такая модель, в форме вероятностного описания случайного процесса, особенно полезна для описания характеристик сигналов и шумов в системах связи.
Периодические и непериодические сигналы. Сигнал x(t) называется периодическим во времени, если существует постоянное Т0 > 0, такое, что
x(t) =x(t + T0) для -∞<t<∞ (1.1)
где через t обозначено время. Наименьшее значение T0, удовлетворяющее это условие, называется периодом сигнала x(t). Период Тп определяет длительность одного полного цикла функции x(t). Сигнал, для которого не существует значения T0, удовлетворяющего уравнение (2.1), именуется непериодическим.
Аналоговые и дискретные сигналы. Аналоговый сигнал x(t) является непрерывной функцией времени, т.е. x(t) однозначно определяется для всех t. Электрический аналоговый сигнал возникает тогда, когда физический сигнал (например, речь) некоторым устройством преобразовывается в электрический. Для сравнения, дискретный сигнал х(кТ) является сигналом, существующим в дискретные промежутки времени; он характеризуется последовательностью чисел, определенных для каждого момента времени, кТ, где к - целое число, а T - фиксированный промежуток времени.
Сигналы, выраженные через энергию или мощность. Электрический сигнал можно представить как изменение напряжения v(t) или тока i(t) с мгновенной мощностью p{t), подаваемой на сопротивление R:
 (1.2)
(1.2)
Или
 (1.3)
(1.3)
В системах связи мощность часто нормируется (предполагается, что сопротивление 9t равно 1 Ом, хотя в реальном канале оно может быть любым). Если требуется определить действительное значение мощности, оно получается путем "денормирования" нормированного значения. В нормированном случае уравнения (2.2) и (2.3) имеют одинаковый вид. Следовательно, вне зависимости оттого, представлен сигнал через напряжение или ток, нормированная форма позволяет нам выразить мгновенную мощность как
 (1.4)
(1.4)
где x ( t ) — это либо напряжение, либо ток.
Понятие каналов связи
Как было указано в предшествующем обсуждении, канал связи обеспечивает соединение передатчика и приёмника. Физический канал может быть двухпроводной линией, который пропускает электрический сигнал, или стекловолокном, которое переносит информацию посредством модулированного светового луча или подводным каналом океана, в котором информация передаётся акустически, или свободным пространством, по которому несущий информационный сигнал излучается при помощи антенны.
Одна общая проблема при передаче сигнала через любой канал - аддитивный шум. Вообще говоря, аддитивный шум создаётся часто внутри различных электронных компонентов, таких, как резисторы и твёрдотельные устройства, используемые в системах связи. Эти шумы часто называют тепловым шумом. Другие источники шума и интерференции (наложения) могут возникать вне системы, например, переходные помехи от других пользователей канала.
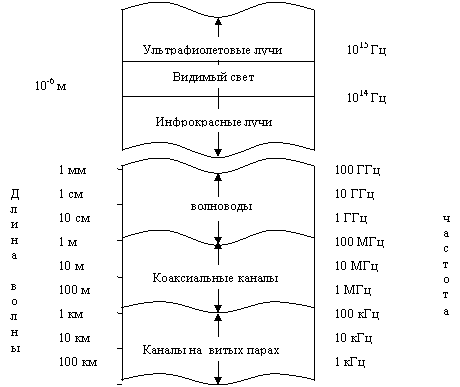
Рисунок 2.1-Частотные диапазоны для каналов связи с направляющими системами
Влияние шума может быть уменьшено увеличением мощности передаваемого сигнала. Однако конструктивные и другие практические соображения ограничивают уровень. мощности передаваемого сигнала. Другое базовое ограничение - доступная ширина полосы частот канала. Ограничение ширины полосы обычно обусловлено физическими ограничениями среды и электрических компонентов, используемых в передатчике и приемнике. Эти два обстоятельства приводят к ограничению количества данных, которые могут быть переданы надёжно по любому каналу связи. Ниже мы опишем некоторые из важных характеристик отдельных каналов связи.
Проводные каналы
Телефонная сеть экстенсивно использует проводные линии для передачи звукового сигнала, а также данных и видеосигналов. Витые проводные пары и коаксиальный кабель в основном, дают электромагнитный канал, который обеспечивает прохождение относительно умеренной ширины полосы частот. Телефонный провод, обычно используемый, чтобы соединить клиента с центральной станции, имеет ширину полосы несколько сотен килогерц. С другой стороны, коаксиальный кабель имеет обычно используемую ширину полосы частот несколько мегагерц. Рисунок 2.1 поясняет частотный диапазон используемых электромагнитных каналов, которые включают волноводы и оптический кабель.
Сигналы, передаваемые через такие каналы, искажаются по амплитуде и фазе, кроме того, на них накладывается аддитивный шум. Проводная линия связи в виде витой пары также склонна к интерференции переходных помех от рядом расположенных пар. Поскольку проводные каналы составляют большой процент каналов связи по всей стране и миру, широкие исследования были направлены на определение их свойств передачи и на уменьшение амплитудных и фазовых искажений в канале.
Волоконно-оптические каналы
Стекловолокно предоставляет проектировщику системы связи ширину полосы частот, которая на несколько порядка больше, чем у каналов с коаксиальным кабелем. В течение прошедшего десятилетия были разработаны оптические кабели, которые имеют относительно низкое затухание для сигнала и высоконадёжные оптические устройства для генерирования и детектирования сигнала. Эти технологические достижения привели к быстрому освоению таких каналов, как для внутренних систем электросвязи, так и для трансатлантических и мировых систем связи. С учётом большой ширины полосы частот, доступной на волоконно-оптических каналах, стало возможно для телефонных компаний предложить абонентам широкий диапазон услуг электросвязи, включая передачу речи, данных, факсимильных и видеосигналов.
Передатчик или модулятор в волоконно-оптической системе связи - источник света, светоизлучающий диод (СИД) или лазер. Информация передается путем изменения (модуляции) интенсивности источника света посредством сигнала сообщения. Свет распространяется через волокно как световая волна, и она периодически усиливается (в случае цифровой передачи детектируется и восстанавливается ретрансляторами) вдоль тракта передачи, чтобы компенсировать затухания сигнала.
В приемнике интенсивность света детектируется фотодиодом, чей выход является электрическим сигналом, который изменяется пропорционально мощности света на входе фотодиода. Источники шума в волоконно-оптических каналах - это фотодиоды и электронные усилители.
Предполагается, что волоконно-оптические каналы заменят почти все каналы проводной линии связи в телефонной сети на рубеже столетия.
Беспроводные (радио) каналы
В системах беспроводной связи (радиосвязи) электромагнитная энергия передается в среду распространения антенной, которая служит излучателем. Физические размеры и структура антенны зависят, прежде всего, от рабочей частоты. Чтобы получить эффективное излучение электромагнитной энергии, размеры антенны должны быть больше, чем 1/10 длины волны. Следовательно, передача радиостанции с AM на несущей, допустим, fc = 1 МГц, соответствующей длине волны λ = с/ fс. = 300 м, требует антенны с диаметром, по крайней мере, 30м. Рисунок 2.2 поясняет различные диапазоны частот для радиосвязи. Способы распространения электромагнитных волн в атмосфере и в свободном пространстве можно разделить на три категории, а именно: распространение поверхностной волной, распространение пространственной волной, распространение прямой волной. В диапазоне очень низких частот (ОНЧ) и звуковом диапазоне, в которых длины волн превышают 10 км, земля и ионосфера образуют волновод для распространения электромагнитных волн. В этих частотных диапазонах сигналы связи фактически распространяются вокруг всего земного шара. По этой причине эти диапазоны частот, прежде всего, используются во всём мире для решения навигационных задач с берега до кораблей.
Ширина полосы частот канала, доступной в этих диапазонах, относительно мала (обычно составляет 1...10 % центральной частоты), и, следовательно, информация, которая передаётся через эти каналы, имеет относительно низкую скорость передачи и обычно неприемлема для цифровой передачи.
Доминирующий тип шума на этих частотах обусловлен грозовой деятельностью вокруг земного шара, особенно в тропических областях. Интерференция возникает из-за большого числа станций в этих диапазонах частот.
Распространение земной волной является основным видом распространения для сигналов в полосе средних частот (0,3...3 МГц). Это-диапазон частот, используемый для радиовещания с AM и морского радиовещания. При AM радиовещании и распространении земной волной дальность связи, даже при использовании мощных радиостанций, ограничена 150 км. Атмосферные шумы, промышленные шумы и тепловые шумы от электронных компонентов приёмника являются основными причинами искажений сигналов, передаваемых в диапазоне средних частот.
Частным случаем распространения пространственной волны является ионосферное распространение. Оно сводится к отражению (отклонение или рефракция волны) передаваемого сигнала от ионосферы, которая состоит из нескольких слоев заряженных частиц, расположенных на высоте 50...400 км от поверхности земли. В дневное время суток разогрев нижних слоев атмосферы солнцем обусловливает появление нижнего слоя на высоте ниже 120км. Эти нижние слои, особенно D-слой, вызывают поглощение частот ниже 2 МГц, таким образом, ограничивая распространения ионосферной волной радиопередач AM радиовещания. Как следствие, мощные радиовещательные сигналы с AM могут распространяться на большие расстояния посредством отражения от ионосферных слоев (которые располагаются на высоте от 140 до 400 км над поверхностью земли) и земной поверхности.
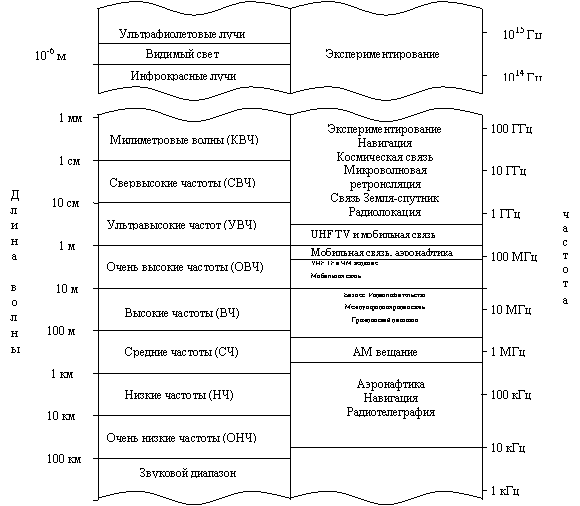
Рисунок 2.2 - Частотные диапазоны для беспроводных каналов связи
Непрерывный канал
Каналы, при поступлении на вход которых непрерывного сигнала на его выходе сигнал тоже будет непрерывным, называют непрерывными. Они всегда входят в состав дискретного канала. Непрерывными каналами являются, например, стандартные телефонные каналы связи (каналы тональной частоты - ТЧ) с полосой пропускания 0,3…3,4 кГц, стандартные широкополосные каналы с полосой пропускания 60…108 кГц, физические цепи и др. Модель канала может быть представлена в виде линейного четырехполюсника (рисунок 3.4)
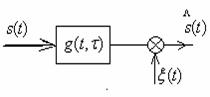
Рисунок 3.4 - Модель линейного непрерывного канала
Дискретный канал
С целью согласования кодера и декодера канала с непрерывным каналом связи используются устройства преобразования сигналов (УПС), включаемые на передаче и приеме. В частном случае - это модулятор и демодулятор. Совместно с каналом связи УПС образуют дискретный канал (ДК), т.е. канал, предназначенный для передачи только дискретных сигналов.
Дискретный канал характеризуется скоростью передачи информации, измеряемой в битах в секунду (бит/с). Другой характеристикой дискретного канала является скорость модуляции, измеряемая в бодах. Она определяется числом элементов, передаваемых в секунду.
Двоичный симметричный канал. Двоичный симметричный канал (binary symmetric channel - BSC) является частным случаем дискретного канала без памяти, входной и выходной алфавиты которого состоят из двоичных элементов (0 и I). Условные вероятности имеют симметричный вид.
 (3.6)
(3.6)
Уравнение (3.6) выражает так называемые вероятности перехода.
Марковские модели ДК. Состояния каналов можно различать по вероятности ошибки в каждом из состояний. Изменения вероятности ошибки можно, в свою очередь, связать с физическими причинами – появлением перерывов, импульсных помех, замираний и т.д. Последовательность состояний является простой цепью Маркова. Простой цепью Маркова называется случайная последовательность состояний, когда вероятность того или иного состояния в i -тый момент времени полностью определяется состоянием ci -1 в (i -1)-й момент. Эквивалентная схема такого канала представлена на рисунке 3.5.
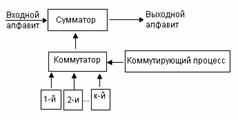
Рисунок 3.5 - Эквивалентная схема дискретного симметричного канала при описании его моделью на основе цепей Маркова
Модель Гильберта. Простейшей моделью, основанной на применении математического аппарата марковских цепей, является модель источника ошибок, предложенная Гильбертом. Согласно этой модели, канал может находиться в двух состояниях- хорошем (состояние 1) и плохом (состояние 2). Первое состояние характеризуется отсутствием ошибок. Во втором состоянии ошибки появляются с вероятностью рош (2) .
Помехи в каналах связи
В реальном канале сигнал при передаче искажается, и сообщение воспроизводится с некоторой ошибкой. Причиной таких ошибок являются искажения, вносимые самим каналом, и помехи, воздействующие на сигнал. Следует четко отделить искажения от помех, имеющих случайный характер. Помехи заранее не известны и поэтому не могут быть полностью устранены.
Под помехой понимается любое воздействие, накладывающееся на полезный сигнал и затрудняющий его прием. Помехи разнообразны по своему происхождению: грозы, помехи электротранспорта, электрических моторов, систем зажигания двигателей и т.д.
Практически в любом диапазоне частот имеют место внутренние шумы аппаратуры, обусловленные хаотическим движением носителей заряда в усилительных приборах, так называемый тепловой шум.
Классификация помех. Гармонические помехи - представляют собой узкополосный модулированный сигнал. Причинами возникновения таких помех являются снижение переходного затухания между цепями кабеля, влияние радиостанций. Импульсные помехи - это помехи, сосредоточенные по времени. Они представляют собой случайную последовательность импульсов, имеющих случайные интервалы времени, причем, вызванные ими переходные процессы не перекрываются по времени.
Демодуляция и обнаружение
В течение данного интервала передачи сигнала T, бинарная узкополосная система передает один из двух возможных сигналов, обозначаемых как g1(t) и g2(t). Подобным образом бинарная полосовая система передает один из двух возможных сигналов, обозначаемых как s1(t) и s2(t). Поскольку общая трактовка демодуляции и обнаружения, по сути, совпадает для узкополосных и полосовых систем, будем использовать запись si(t) для обозначения передаваемого сигнала, вне зависимости от того, является система узкополосной или полосовой. Итак, для любого канала двоичный сигнал, переданный в течение интервала (0, Т), представляется следующим образом.
 (4.11)
(4.11)
Принятый сигнал г(t) искажается вследствие воздействия шума n(t) и, возможно, неидеальной импульсной характеристики канала hc(t) и описывается следующей формулой (4.12)
 (4.12)
(4.12)
В нашем случае n(t) предполагается процессом AWGN с нулевым средним, а знак "*" обозначает операцию свертки, Для бинарной передачи по идеальному, свободному от искажений каналу, где свертка с функцией hc(t) не ухудшает качество сигнала (поскольку для идеального случая hc(t) - импульсная функция), вид r(t) можно упростить.
 i=1,2 0≤t≤T (4.13)
i=1,2 0≤t≤T (4.13)
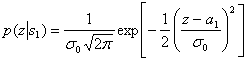
Типичные функции демодуляции и обнаружения цифрового приемника показаны на рисунке. 4.1. Некоторые авторы используют термины "демодуляция" и "обнаружение" как синонимы. В данном конспекте они имеют различные значения. Демодуляцию (demodulation) мы определим как восстановление сигнала (в неискаженный узкополосный импульс), а обнаружение (detection) - как процесс принятия решения относительно цифрового значения этого сигнала. При отсутствии кодов коррекции ошибок на выход детектора поступают аппроксимации символов (или битов) сообщений mi’ (также называемые жестким решением). При использовании кодов коррекции ошибок на выход детектора поступают аппроксимации канальных символов (или кодированных битов) u'i , имеющие вид жесткого или мягкого решения. Для краткости термин "обнаружение" иногда применяется для обозначения совокупности всех этапов обработки сигнала, выполняемых в приемнике, вплоть до этапа принятия решении.
В блоке демодуляции и дискретизации (рисунок 4.1) изображен принимающий фильтр (по сути, демодулятор), выполняющий восстановление сигнала » качестве подготовки к следующему необходимому этапу - обнаружению. Фильтрация в передатчике и канале обычно приводит к искажению принятой последовательности импульсов, вызванному межсимвольной интерференцией, а значит, эти импульсы не совсем готовы к дискретизации и обнаружению. Задачей принимающего фильтра является восстановление узкополосного импульса с максимально возможным отношением сигнал/шум (signal-to-noise ratio - SNR) и без межсимвольной интерференции. Оптимальный принимающий фильтр, выполняющий такую задачу, называется согласованным (matched), или коррелятором (correlator).. За принимающим фильтром может находиться выравнивающий фильтр (equalizing filter), или эквалайзер (equalizer); он необходим только в тех системах, в которых сигнал может искажаться вследствие межсимвольной интерференции, введенной каналом. Принимающий и выравнивающий фильтры показаны как два отдельных блока, что подчеркивает различие их функций. Впрочем, в большинстве случаев при использовании эквалайзера для выполнения обеих функций (а следовательно, и для компенсации искажения, внесенного передатчиком и каналом) может разрабатываться единый фильтр. Такой составной фильтр иногда называется просто выравнивающим или принимающим и выравнивающим.
На рисунке 4.1 выделены два этапа процесса демодуляции/обнаружения. Этап 1, преобразование сигнала в выборку, выполняется демодулятором и следующим за ним устройством дискретизации, в конце каждого интервала передачи символа Т, на выход устройства дискретизации детекторную точку, поступает выборка z(T), иногда называемая тестовой статистикой. Значение напряжения выборки z(T) прямо пропорционально энергии принятого символа и обратно пропорционально шуму. На этапе 2 принимается решение относительно цифрового значения выборки (выполняется обнаружение). Предполагается, что шум является случайным гауссовым процессом, а принимающий фильтр демодулятора — линейным. Линейная операция со случайным гауссовым процессом дает другой случайный гауссов процесс. Следовательно, на выходе фильтра шум также является гауссовым. Значит, выход этапа 1 можно описать выражением

 (4.14)
(4.14)
где  — желаемый компонент сигнала, а
— желаемый компонент сигнала, а  — шум. Для упрощения записи выражение (4.14) будем иногда представлять в виде z = ai+n0. Шумовой компонент n0 - это случайная гауссова переменная с нулевым средним, поэтому z(T) — случайная гауссова переменная со средним a1 или a2, в зависимости от того, передавался двоичный нуль или двоичная единица. Плотность вероятности случайного гауссового шума n0 можно выразить как
— шум. Для упрощения записи выражение (4.14) будем иногда представлять в виде z = ai+n0. Шумовой компонент n0 - это случайная гауссова переменная с нулевым средним, поэтому z(T) — случайная гауссова переменная со средним a1 или a2, в зависимости от того, передавался двоичный нуль или двоичная единица. Плотность вероятности случайного гауссового шума n0 можно выразить как
 (4.15)
(4.15)
где  2 - дисперсия шума Используя выражения (4.14) и (4.15), можно выразить плотности условных вероятностей
2 - дисперсия шума Используя выражения (4.14) и (4.15), можно выразить плотности условных вероятностей  и
и  .
.
 (4.16)
(4.16)
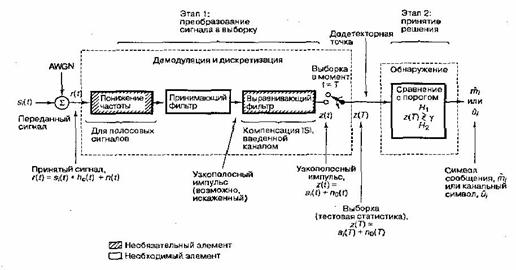
Рисунок 4.1 - Два основных этапа демодуляции/обнаружения цифровых сигналов.
Согласованный фильтр
Согласованный фильтр (matched filter) - это линейное устройство, спроектированное, чтобы давать на выходе максимально возможное для данного передаваемого сигнала отношение сигнал/шум. Предположим, что на вход линейного, инвариантного относительно времени (принимающего) фильтра, за которым следует устройство дискретизации (рисунок 4.2), подастся известный сигнал s(t) плюс шум AWGN n(t).
Межсимвольная интерференция
На рисунке 4.3 а) представлены фильтрующие элементы типичной системы цифровой связи. В системе - передатчике, приемнике и канале - используется множество разнообразных фильтров (и реактивных элементов, таких как емкость и индуктивность). В передатчике информационные символы, описываемые как импульсы или уровни напряжения, модулируют импульсы, которые затем фильтруются для согласования с определенными ограничениями полосы. В узкополосных системах канал (кабель) имеет распределенное реактивное сопротивление, искажающее импульсы. Некоторые полосовые системы такие, как беспроводные, являются, по сути, каналами с замираниями, которые проявляют себя как нежелательные фильтры, также искажающие сигнал. Если принимающий фильтр настраивается на компенсацию искажения, вызванного как передатчиком, так и каналом, он зачастую называется выравнивающим (equalizing filter) или принимающим/выравнивающим (receiving/equalizing). На рисунке 4.10,б приведена удобная модель системы, объединяющая следствия фильтрации в одну общесистемную передаточную функцию.
 (4.40)
(4.40)
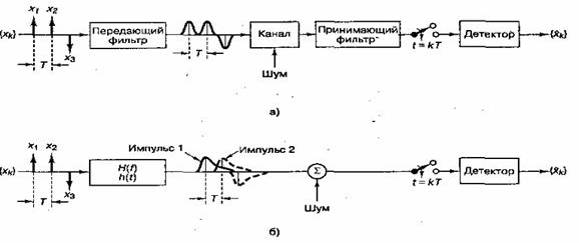
Рисунок 4.3 - Межсимвольная интерференция в процессе обнаружения:
а) типичная узкополосная цифровая система;
б) эквивалентная модель.
Биполярный метод
При биполярном методе символу 0 соответствует нулевое значение сигнала на передаче, а символу 1-попеременно значения +А или -А. В связи с этим в американской литературе его называют AMI (Alternate Mark Inversion) методом. График передаваемого сигнала показан на рисунке 4.23. Спектральная плотность мощности случайной последовательности сигналов данных относится к одному из типов, приведенных на рисунке 4.23 (кривая 2). Она обращается в нуль на нулевой частоте и на двойной частоте Найквиста 2/N. Таким образом, возможна передача и по линиям, содержащим разделительные трансформаторы. Максимум спектральной плотности прямоугольных импульсов располагается несколько ниже частоты fN .
Для восстановления информации на приеме при использовании сигналов со значениями ±АЕ и 0 пороговый уровень должен быть установлен равным ±АЕ/2.
При таком кодировании возможна только синхронная передача. Последовательность нулей преобразуется на передаче в сигнал с нулевой амплитудой, и восстановление фазы тактов в приемнике невозможно. Поэтому, чтобы сохранить синхронизм между данными и тактами на приеме, необходимо исключить появление длинных последовательностей нулей в передаваемом сигнале, например, путем скремблирования.
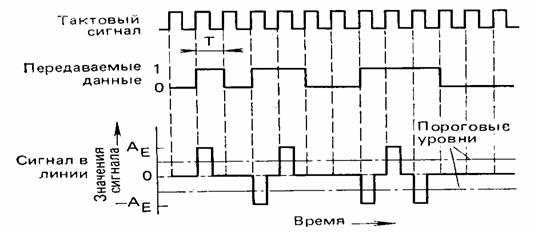
Рисунок 4.23 - Графики, иллюстрирующие биполярный метод
Псевдотроичный метод
При псевдотроичном методе прямоугольные импульсы короче тактового интервала (длительности передачи символа); например, имеют половинную длительность, и поэтому переходный процесс успевает затухнуть до того момента, когда посылается новый импульс.
Кодирование при псевдотроичном методе такое же, как и при биполярном методе, однако единица передается импульсом половинной длительности. Поэтому в американской литературе биполярный метод называют full bauded AMI -методом, а псевдотроичный - half bauded AMI-методом. Временная диаграмма показана на рис., а спектральная плотность мощности - на рисунке 5.2 (кривая 3).
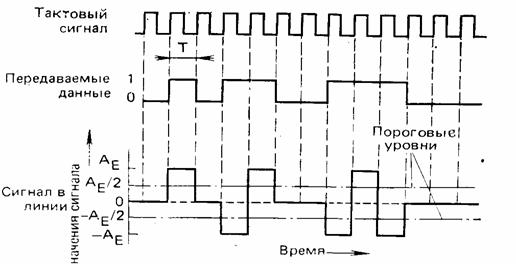
Рисунок 5.2 - Графики, иллюстрирующие псевдотроичный метод
При одинаковом пиковом напряжении на передаче высота максимума спектральной плотности значительно меньше, чем при биполярном методе; поэтому помехи, создаваемые посторонними системами, меньше, а чувствительность к помехам, напротив, больше, чем при биполярном методе. В отношении остальных свойств оба метода равноценны.
Многопозиционная модуляция
Используя известное тригонометрическое равенство, называемое теоремой Эйлера, введем комплексную запись синусоидальной несущей
 (6.4)
(6.4)
Во-первых, при комплексной записи в компактной форме,  указаны два важных компонента любой синусоидальной несущей волны, называемых взаимно ортогональными синфазной (действительной) и квадратурной (мнимой) составляющими. Во-вторых, как показано на рисунке 6.1, не модулированная несущая удобно представляется в полярной системе координат в виде единичного вектора с постоянной скоростью рад/с, вращающегося против часовой стрелки.
указаны два важных компонента любой синусоидальной несущей волны, называемых взаимно ортогональными синфазной (действительной) и квадратурной (мнимой) составляющими. Во-вторых, как показано на рисунке 6.1, не модулированная несущая удобно представляется в полярной системе координат в виде единичного вектора с постоянной скоростью рад/с, вращающегося против часовой стрелки.
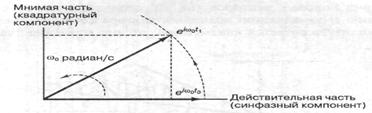
Рисунок 6.1 - Векторное представление синусоиды
При увеличении t (от t0 до t1 мы можем изобразить переменные во времени проекции вращающегося вектора на синфазной (l) и квадратурной (Q) осях. Эти декартовы оси обычно называются синфазным (l channel) и квадратурным каналом (Q channel), а их проекции представляют взаимно ортогональные составляющие сигнала, связанные с этими каналами. В-третьих, процесс модуляции несущей можно рассматривать как возмущение вращающегося вектора (и его проекций).
Рассмотрим, например, несущую, амтитудно-модулированную синусоидой с единичной амплитудой и частотой ωm, где ωm ≤ω0. Переданный сигнал имеет следующий вид.
 (6.5)
(6.5)
где Re{x} - действительная часть комплексной величины [х]. На рисунке 6.2 показано, что вращающийся вектор , представленный на рисунке 6.1, возмущается двумя боковыми членами -  , вращающимся против часовой стрелки, и
, вращающимся против часовой стрелки, и  , вращающимся по часовой стрелке. Боковые векторы вращаются намного медленнее, чем вектор несущей волны. В результате модулированный вращающийся вектор несущей волны растет и уменьшается согласно указаниям боковых полос, но частота его вращения остается постоянной; отсюда и название - "амплитудная модуляция".
, вращающимся по часовой стрелке. Боковые векторы вращаются намного медленнее, чем вектор несущей волны. В результате модулированный вращающийся вектор несущей волны растет и уменьшается согласно указаниям боковых полос, но частота его вращения остается постоянной; отсюда и название - "амплитудная модуляция".
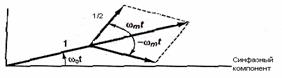
Рисунок 6.2 - Амплитудная модуляция
Еще один пример, иллюстрирующий полезность векторного представления, - это частотная модуляция (frequency modulation - FM) несущей похожей синусоидой частотой вращения ωm рад/с. Аналитическое представление узкополосной частотной модуляции (narrowband FM - NFM) подобно представлению амплитудной модуляции и описывается выражением:
 (6.6)
(6.6)
где β - коэффициент модуляции. На рисунке 6.3 показано, что, как и в предыдущем случае, вектор несущей волны возмущается двумя боковыми векторами. Но поскольку один из них, как указано в формуле (6.6), имеет знак "минус", симметрия боковых векторов, вращающихся по часовой стрелке и против нее, отличается от имеющегося случая амплитудной модуляции. При модуляции AM симметрия приводит к увеличению и уменьшению вектора несущей волны со временем. В случае модуляции NF] симметрия боковых векторов (на 90° отличающаяся от симметрии AM) приводит к ускорению и замедлению вращения вектора согласно указаниям боковых полос, при этом амплитуда остается неизменной; отсюда название - "частотная модуляция".
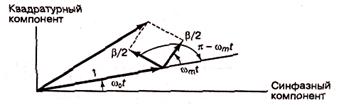
Рисунок 6.3 - Узкополосная частотная модуляция
Амплитудная манипуляция
Сигнал в амплитудной манипуляции (amplitude shift keying — ASK), изображенной на рисунке 6.4 в, описывается выражением (6.7). На рисунке 6.4 в, М выбрано равным 2, что соответствует двум типам сигналов. Изображенный на рисунке сигнал в модуляции ASK может соответствовать радиопередаче с использованием двух сигналов, амплитуды которых равны 0 и  . В векторном представлении использованы те же фазово-амплитудные полярные координаты, что и в примере для модуляции PSK.
. В векторном представлении использованы те же фазово-амплитудные полярные координаты, что и в примере для модуляции PSK.
 (6.7)
(6.7)
где амплитудный член  может принимать М дискретных значений, а фазовый член ф - это произвольная константа.
может принимать М дискретных значений, а фазовый член ф - это произвольная константа.
Оптимальный приемник
Предполагается, что сигнал искажается только вследствие шума AWGN. Принятый сигнал будем описывать как сумму переданного сигнала и случайного шума.
 (8.2)
(8.2)
При наличии подобного принятого сигнала процесс обнаружения включает два основных этапа. На первом этапе принятый сигнал г(t) усекается до одной случайной переменной z(T) или до набора случайных переменных zi(T) (i= 1, ..., М), формируемых на выходе демодулятора и устройства дискретизации в момент времени t = T, где Т - длительность символа. На втором этапе на основе сравнения z(T) с порогом или согласно критерию максимума zi(T) принимается решение относительно значения символа. Вообще, этап 1 можно рассматривать как преобразование сигнала в точку в пространстве решений. Эту точку, представляющую собой важнейшую контрольную точку в приемнике, можно назвать додетекторной (predetection). В каждый момент передачи символа сигнал, доступный в додетекторпой точке, является выборкой узкополосного импульса. На данный момент битового значения у нас еще нет.
Cогласованный фильтр обеспечивает максимальное отношение сигнал/шум на выходе фильтра в момент t = T. Как одна из реализаций согласованного фильтра описывался коррелятор. Теперь мы можем определит корреляционный приемник, состоящий, как показано на рисунке 8.1 а, из М корреляторов, выполняющих преобразование принятого сигнала r(t) в последовательность М чисел или выходов коррелятора, zi(T) (i= 1,..М). Каждый выход коррелятора описывается следующим интегралом произведения или корреляцией с принятым сигналом.
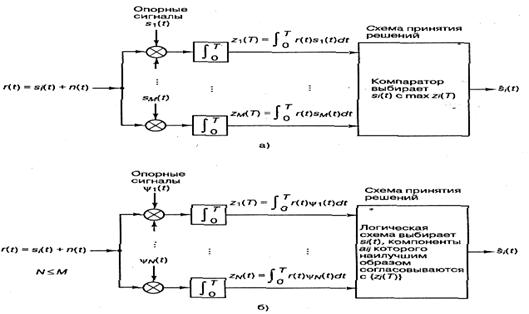
Рисунок 8.1- Корреляционный приемник
Коды Рида- Соломона
Коды Рида-Соломона (Reed-Solomon code, R-S code) — это недвоичные циклические коды, символы которых представляют собой m-битовые последовательности, где т — положительное целое число, большее 2. Код (n,к) определен на m-битовых символах при всех n и k, для которых
 (11.1)
(11.1)
где k - число информационных битов, подлежащих кодированию, а n - число кодовых символов в кодируемом блоке. Для большинства сверточных кодов Рида-Соломона (n, к)
 (11.2)
(11.2)
где t - количество ошибочных битов в символе, которые может исправить код, а n-k = 2t- число контрольных символов. Расширенный код Рида-Соломона можно получить при n = 2m или n= 2m+ 1, но не более того.
Код Рида-Соломона обладает наибольшим минимальным расстоянием, возможным для линейного кода с одинаковой длиной входных и выходных блоков кодера. Для недвоичных кодов расстояние между двумя кодовыми словами определяется (по аналогии с расстоянием Хэмминга) как число символов, которыми отличаются последовательности. Для кодов Рила-Соломона минимальное расстояние определяется следующим образом.
 (11.3)
(11.3)
Сверточные коды. Особенностью линейного блочного кода, который описывается двумя целыми числами, n и k, и полиномиальным или матричным генератором является то, что каждый из n-кортежей кодовых слов однозначно определяется k-кортeжeм входного сообщения. Целое число к указывает на число бит данных, которые образуют вход блочного кодера. Целое число п - это суммарное количество разрядов в соответствующем кодовом слове на выходе кодера. Отношение k/n, называемое степенью кодирования кода (code rate), является мерой добавленной избыточности. Сверточный код описывается тремя целыми числами n, k и К, где отношение k/n имеет такое же значение степени кодирования (информация, приходящаяся на закодированный бит), как и для блочного кода; однако п не определяет длину блока или кодового слова, как это было в блочных кодах. Целое число К является параметром, называемым длиной кодового ограничения (constrain! length); оно указывает число разрядов k-кортежа в кодирующем регистре сдвига. Важная особенность сверточных кодов, в отличие от блочных, состоит в том, что кодер имеет память - n-кортежи, получаемые при сверточном кодировании, являются функцией не только одного входного k-кортежа, но и предыдущих К-1 входных k-кортежей. На практике nи к - это небольшие целые числа, а К изменяется с целью контроля мощности и сложности кода.
Методы декодирования корректирующих кодов. Существует несколько вариантов декодирования циклических кодов. Один из них заключается в следующем:
1. Числение остатка (синдрома). Принятую комбинацию делят на образующий многочлен Р(Х). Остаток R(X)=0 означает, что комбинации принята без ошибок;
2. Подсчет веса остатка W. Если вес остатка равен или меньше числа исправляемых ошибок, т.е. W≤s, то принятую комбинацию складывают по модулю 2 с остатком и получают исправленную комбинацию;
3. Циклический сдвиг на один символ влево. Если W>s, то производят циклический сдвиг влево и полученную комбинацию снова делят на образующий многочлен. Если вес остатка W≤s , то циклически сдвинутую комбинацию складывают с остатком и затем циклически сдвигают ее в обратную строну вправо на один символ. В результате получают исправленную комбинацию;
4. Дополнительные циклические сдвиги влево. Если после циклического сдвига на один символ по-прежнему W>s, то производят дополнительные циклические сдвиги влево. При этом после каждого сдвига сдвинутую комбинацию делят на Р(Х) и проверяют вес остатка. При W≤s выполняют действия, указанные в п.3, с той лишь разницей, что обратных циклических сдвигов вправо делают столько, сколько их было сделано влево.
Метод проверки на четность. Если комбинация принята без искажения, то сумма единиц по модулю 2 даст нуль. При искажении какого – либо символа суммирование при проверке может дать единицу. По результату суммирования каждой из проверок составляют двоичное число, указывающее на место искажения.
Мягкое и жесткое декодирование. Для двоичной кодовой системы со степенью кодирования 1/2 демодулятор подает на декодер два кодовых символа за раз. Для жесткого (двухуровневого) декодирования каждую пару принятых кодовых символов можно изобразить на плоскости в виде одного из углов квадрата. Углы помечены двоичными числами (0, 0), (0, 1), (1, 0) и (1, 1), представляющими четыре возможных значения, которые могут принимать два кодовых символа в жесткой схеме принятия решений. Аналогично для 8-уровневого мягкого декодирования каждую пару кодовых символов можно отобразить на плоскости в виде равностороннего прямоугольника размером 8x8, состоящего из 64 точек. В этом случае демодулятор больше не выдает жестких решений; он выдает квантованные сигналы с шумом (мягкая схема принятия решений).
Основное различие между мягким и жестким декодированием по алгоритму Витерби состоит в том, что в мягкой схеме не используется метрика расстояния Хэмминга, поскольку она имеет ограниченное разрешение.
Мажоритарное декодирование. Этот метод заключается в многократной проверке каждого символа принятой кодовой комбинации по специальным таблицам коэффициентов, составленным для каждого варианта (n, k) циклического кода. Значение каждого символа определяется по мажоритарному принципу (слово «мажоритарный» означает большинство), т.е. по принципу голосования. Это означает, что если, например, один из пяти проверок данного символа три показали 1, а две- 0, то символу присваивается значение 1. Если все проверки показали 1 или 0, то символ считается неискаженным и принимается без изменения.
Если при какой-либо проверке окажется равное число 1 и 0, то это означает, что для данного кода произошла неисправимая комбинация ошибок и принятая комбинация должна быть забракована.
Алгоритм Возенкрафта и Фано. Ранее, до того как Витерби открыл оптимальный алгоритм декодирования сверточных кодов, существовали и другие алгоритмы. Самым первым был алгоритм последовательного декодирования, предложенный Уозенкрафтом (Wozencraft) и модифицированный Фано (Fano). В ходе работы последовательного декодера генерируется гипотеза о переданной последовательности кодовых слов и рассчитывается метрика между этой гипотезой и принятым сигналом. Эта процедура продолжается до тех пор, пока метрика показывает, что выбор гипотезы правдоподобен, в противном случае гипотеза последовательно заменяется, пока не будет найдена наиболее правдоподобная. Поиск при этом происходит методом проб и ошибок. Для мягкого или жесткого декодирования можно разработать последовательный декодер, но обычно мягкого декодирования стараются избегать из-за сложных расчетов и большой требовательности к памяти.
Решетчатое (треллис) кодирование. При использовании в системах связи реального времени кодов коррекции ошибок достоверность передачи улучшается за счет расширения полосы частот. Как для блочных, так и для сверточных кодов преобразование каждого k-кортежа входных данных в более длинный n-кортеж кодового слова требует дополнительного расширения полосы пропускания. Вследствие этого в прошлом кодирование не было особенно популярно в узкополосных каналах (таких, как телефонные), в которых расширять полосу частот сигнала было нецелесообразно. Однако приблизительно с 1984 года возникает активный интерес к схемам, где модуляция объединяется с кодированием; такие схемы называются решетчатым кодированием (trellis-coded modulation — ТСМ). Эти схемы позволяют повысить достоверность передачи, не расширяя при этом полосу частот сигнала.
Алгоритм декодирования Витерби. Алгоритм декодирования Витерби был открыт и проанализирован Витерби (Viterbi) в 1967 году. В алгоритме Витерби, по сути, реализуется декодирование, основанное на принципе максимального правдоподобия; однако в нем уменьшается вычислительная нагрузка за счет использования особенностей структуры конкретной решетки кода. Преимущество декодирования Витерби, по сравнению с декодированием по методу "грубой силы", заключается в том, что сложность декодера Витерби не является функцией количества символов в последовательности кодовых слов. Алгоритм включает в себя вычисление меры подобия (или расстояния), между сигналом, полученным в момент времени t1 и всеми путями решетки, входящими в каждое состояние в момент времени t1. В алгоритме Витерби не рассматриваются те пути решетки, которые, согласно принципу максимального правдоподобия, заведомо не могут быть оптимальными. Если в одно и то же состояние входят два пути, выбирается тот, который имеет лучшую метрику; такой путь называется выживающим. Отбор выживающих путей выполняется для каждого состояния. Таким образом, декодер углубляется в решетку, принимая решения путем исключения менее вероятных путей. Предварительный отказ от маловероятных путей упрощает процесс декодирования.
Смысл декодирования Витерби заключается в следующем: если любые два пути сливаются в одном состоянии, то при поиске оптимального пути один из них всегда можно исключить.
Техническая реализация кодирующих и декодирующих устройств . Оценка сложности построения устройств кодирования. Как следует из принципов построения линейных блочных кодов, основными операциями, выполняемыми при кодировании и декодировании, являются суммирование по модулю 2, операции сдвига, запись, считывание и хранение двоичных разрядов. Эти операции могут быть реализованы на стандартных логических элементах. Поэтому сложность схем кодирования и декодирования можно оценить числом таких элементов (например, триггеров).
Рассмотрим принцип построения кодера кода Хемминга. Кодирование сводится к нахождению проверочных разрядов путем сложения по модулю 2 соответствующих информационных элементов. Поскольку на вход кодера символы поступают со скоростью k элементов в единицу времени, а на выходе формируется поток со скоростью n элементов в единицу времени, то для согласования скоростей необходимо буферное устройство памяти, содержащее k ячеек. Информация в буферную память записывается в последовательном коде и на (k+1)-м такте в параллельном коде поступает в кодирующее устройство. Сформированная n-разрядная комбинация в параллельном коде записывается в буферный регистр, откуда с нужной скоростью поступает в канал связи. Поскольку скорость работы кодирующего устройства может быть значительно выше, чем скорость поступления входной информации, то кодер всегда работает в реальном масштабе времени передачи информации.
Алгоритмы сжатия без потерь
Код Хаффмана. Код Хаффмана (Huffman code) (201 - это свободный от префикса код, который может давать самую короткую среднюю длину кода я для данного входного алфавита. Самая короткая средняя длина кода для конкретного алфавита может быть значительно больше энтропии алфавита источника, и тогда эта невозможность выполнения обещанного сжатия данных будет связана с алфавитом, а не с методом кодирования. Часть алфавита может быть модифицирована для получения кода расширения, и тот же метод повторно применяется для достижения лучшего сжатия. Эффективность сжатия определяется коэффициентом сжатия. Эта мера равна отношению среднего числа бит на выборку до сжатия к среднему числу бит на выборку после сжатия.
Код Лемпеля-Зива –Уэлча. Основной сложностью при использовании кода Хаффмана является то, что вероятности символов должны быть известны или оценены и как кодер, так и декодер должны знать дерево кодирования. Если дерево строится из необычного для кодера алфавита, канал, связывающий кодер и декодер, должен также отправлять кодирующее дерево как заголовок сжатого файла. Эти служебные издержки уменьшат эффективность сжатия, реализованную с помощью построения и применения дерева к алфавиту источника. Алгоритм Лемпеля-Зива (Lempel-Ziv) и его многочисленные разновидности используют текст сам по себе для итеративного построения синтаксически выделенной последовательности кодовых слов переменной длины, которые образуют кодовый словарь.
Сжатие аудиосигналов.
Аудиосжатие широко применяется в потребительских и профессиональных цифр< аудиопродуктах, таких как компакт-диски (compact disc — CD), цифровая аудиолента (digital audio type — DAT), мини-диск (mini-disk — MD), цифровая компакт-кассета (digital compact cassette — DCC), универсальный цифровой диск (digital versatile disc. DVD), цифровое аудиовещание (digital audio broadcasting — DAB) и аудиопродукция формате МРЗ от экспертной группы по вопросам движущегося изображения (М< Picture Experts Group — (MPEG). К тому же сжатие речи в телефонии, в частности, сотовой телефонии, требуемое для экономии полосы частот и сбережения времени, ни батареи, дало начало процессу разработки множества стандартов сжатия речи, личные алгоритмы применимы к речевым и потребительским сигналам более широкой полосы частот. Аудио- и речевые схемы сжатия можно для удобства разделить согласно приложениям, что отражает некоторую меру приемлемого качества.
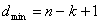
Адаптивная дифференциальная ИКМ (АДИКМ). Используя прошлые данные для измерения (т.е. квантования) новых переходим от обычной импульсно-кодовой модуляции (pulse-code modulation — PCM) к дифференциальной (differential PCM — DPCM). В DPCM предсказание следующего выборочного значения формируется на основании предыдущих значений. Устройства квантования называются мгновенными устройствами квантования или устройствами квантования без памяти, так как цифровые преобразования основаны на единичной (текущей) входной выборке. Этими свойствами были неравновероятные уровни источника и зависимые выборочные значения. Корреляционные характеристики источника можно представить во временной области с помощью выборки его автокорреляционной функции и в частотной области — его спектром мощности. Если изучается спектр мощности Gx(f) кратковременного речевого сигнала, как изображено на рисунке 9.2, то видим, что спектр имеет глобальный максимум в окрестности от 300 до 800 Гц и убывает со скоростью от 6 до 12 дБ/октаву. Эта операция производится в контуре сказания и сравнения, верхний контур кодера изображен на рисунке 13.2. Кодер корректирует свои предсказания, составляя сумму предсказанного значения и ошибки предсказания.
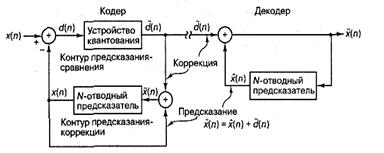
Рисунок 13.1 - N- отводный дифференциальный импульсно-кодовый модулятор с предсказанием
Эта модель, использующая 12-отводный синтезатор речи, нашла применение в детских говорящих играх.

Рисунок 13.2 - Блочная диаграмма: моделирование речи с помощью линейного кодера с предсказанием
Сжатие изображения
Мы часто слышали старое высказывание: Картина стоит тысячи слов. Верно ли оно? 1000 слов содержит 6000 знаков, которые, будучи закодированы как 7-битовые символы ASCII, требуют в общей сложности 42 000 бит. Какого размера образ (или картина) может быть описан с помощью 42 000 бит?
Существует множество стандартов, которые были разработаны для сжатия изображений.
Алгоритм сжатия JPEG . JPEG (Joint Photography Experts Group - объединенная группа экспертов в области фотографии) - это общее название, которое дано стандарту ISO/JPEG 10918-1 и стандарту ITU-T Recommendation T.81 "Цифровое сжатие, постоянных изображений непрерывного тона", JPEG, в основном, известен как основанная на преобразовании схема сжатия с потерями.
Рисунок 13.4 - Блочная диаграмма кодера JPEG
Применение вейвлет – преобразования для сжатия изображений.
Рекурсивный (волновой) алгоритм. Английское название рекурсивного сжатия — wavelet. На русский язык оно также переводится как волновое сжатие и как сжатие с использованием всплесков. Этот вид архивации известен довольно давно и напрямую исходит из идеи использования когерентности областей.
Заключение
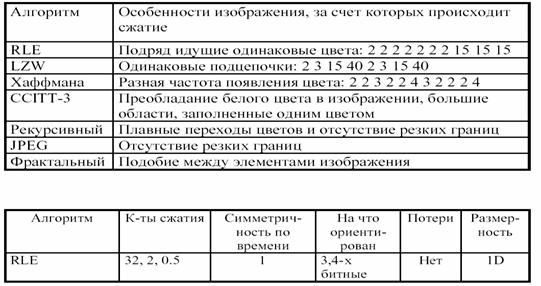
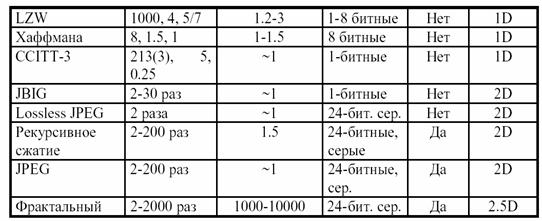
В заключение рассмотрим таблицы, в которых сводятся воедино параметры различных алгоритмов сжатия изображений, рассмотренных нами выше.
|
Список литературы
1. Скляр Б. Цифровая связь. Теоретические основы и практическое применение: 2-е изд. /Пер. с англ. М.: Издательский дом «Вильямс», 23. 114 с.
2. Прокис Дж. Цифровая связь. Радио и связь, 2000.-797с.
3. А.Б. Сергиенко. Цифровая обработка сигналов: Учебник для вузов. - М.:-2002.
4. Шварцман В.О., Емельянов Г.А. Теория передачи дискретной информации. – М.: Связь, 1979. -424 с.
5. Передача дискретных сообщений / Под ред. В. П. Шувалова. - М.: Радио и связь, 1990. -464 с.
6. Емельянов Г. А., Шварцман В. О. Передача дискретной информации. - М.: Радио и связь, 1982. - 240 с.
7. Дмитриев В.И. Прикладная теория информации: Учебник. – М.: Высш.шк., 1989.
8. Тутевич В.Н. Телемеханика: Учебное пособие.- М.: Высш. Шк., 1985. -423 с.
9. Ватолин Д.С. Алгоритмы сжатия изображений. Методическое пособие. Издательский отдел факультета Вычислительной Математики и Кибернетики МГУ им. М.В.Ломоносова (лицензия ЛР № 040777 от 23.07.96), 1999 г. — 76 с.
ТЕХНОЛОГИИ ЦИФРОВОЙ СВЯЗИ
Конспект лекций
для студентов всех форм обучения специальности 050719 – Радиотехника, электроника и телекоммуникации
Алматы 2008
СОСТАВИТЕЛИ: К.С.Чежимбаева, Д.А.Абиров. Технологии цифровой связи. Конспект лекций для студентов всех форм обучения специальности 050719 – Радиотехника, электроника и телекоммуникации.- Алматы: АИЭС, 2008.- 61с.
Конспект лекций посвящен вопросам элементов систем цифровой связи, каналам связи и их характеристикам, узкополосной передаче, методам цифровой модуляции, методам синхронизации, методам и устройствам помехоустойчивого кодирования, принципам применение системы связи с обратной связью и применению эффективного кодирования для сжатия данных, которые необходимы при изучении дисциплин, связанных с этой тематикой. Конспект лекций предназначен для студентов всех форм обучения по специальности 050719 – Радиотехника, электроника и телекоммуникации.
Содержание
Введение
1 Лекция №1. Элементы систем цифровой связи
1.1 Функциональная схема и основные элементы цифровой системы
2 Лекция №2. Каналы связи и их характеристики
2.1 Понятие каналов связи
2.2 Проводные каналы
2.3 Волоконно-оптические каналы
2.4 Беспроводные (радио) каналы
3 Лекция №3. Математические модели каналов связи
3.1 Математические модели каналов связи
4 Лекция №4. Узкополосная передача
4.1 Демодуляция и обнаружения
4.2 Обнаружение сигнала в гауссовом шуме
4.3 Согласованный фильтр
4.4. Межсимвольная интерференция
5 Лекция №5. Алгоритмы цифрового кодирования
5.1 Алгоритмы цифрового кодирования
5.2 Биполярный метод
5.3 Псевдотроичный метод
5.4 Парно – селективный троичный код
6 Лекция №6. Полосовая модуляция и демодуляция
6.1 Методы цифровой полосовой модуляции
6.2 Многопозиционная модуляция
6.3 Амплитудная манипуляция
7 Лекция №7 Оптимальный прием ДС сигнала
7.1 Оптимальный прием ДС сигнала
8 Лекция №8 Спектральные характеристики модулированных колебаний
8.1 Спектральные характеристики модулированных колебаний
8.2 Оптимальный приемник
8.3 Когерентный и некогерентный прием
8.4 Цифровой согласованный фильтр
8.5 Оценка помехоустойчивости модулированных сигналов
9 Лекция №9. Методы синхронизации в ЦСС
9.1 Синхронизация в синхронных и асинхронных системах
9.2 Синхронизация поэлементная, групповая и цикловая
10 Лекция №10 Методы и устройства помехоустойчивого кодирования
10.1 Основные принципы обнаружения и исправления ошибок
10.2 Кодовые расстояние и корректирующая способность кода
10.3 Классификация корректирующих кодов
11 Лекция №11.Помехоустойчивые коды и методы декодирования корректирующих кодов
11.1 Коды Рида – Соломона
12 Лекция №12. Системы связи с обратной связью
12.1 Характеристики систем с обратной связью и их особенности
12.2 Структурная схема системы с информационной обратной связью (ИОС) и решающей обратной связью (РОС), характеристики и алгоритмы работы
13 Лекция №13. Сжатие данных в ЦСС
13.1 Алгоритмы сжатия без потерь
Заключение
Список литературы
Введение
В этих конспектах лекции мы представляем основные принципы, которые лежат в основе анализа и синтеза систем цифровой связи. Предмет цифровой связи включает в себя передачу информации в цифровой форме от источника, который создаёт информацию для одного или многих мест назначения. Особенно важным для анализа и синтеза систем связи являются характеристики физических каналов, через которые передаётся информация. Характеристики канала обычно влияют на синтез базовых составных блоков системы связи. Ниже мы опишем элементы системы связи и их функции.
Развитие телекоммуникационных сетей увеличивает роль и значение передачи дискретных сообщений в электросвязи.
Целью дисциплины является изложение принципов и методов передачи цифровых сигналов, научных основ и современное состояние технологии цифровой связи; дать представление о возможностях и естественных границах реализации цифровых систем передачи и обработки, уяснить закономерности, определяющие свойства устройств передачи данных и задачи их функционирования.
Следует отметить, что самая ранняя форма электрической связи, а именно телеграфная связь, была системой цифровой связи. Электрический телеграф был разработан Сэмюэлём Морзе и демонстрировался в 1837 г. Морзе изобрел двоичный код переменой длины, в котором буквы английского алфавита представлены последовательностью точек и тире (кодовые слова). В этом коде часто встречающиеся буквы представлены короткими кодовыми словами, в то время как буквы, встречающиеся менее часто, — более короткими кодовыми словами. Таким образом, код Морзе был предшественником методов кодирования источников кодом переменной длины.
Почти 40 годами позже, в 1875г., Эмиль Бодо изобрёл код для телеграфной связи, в котором каждая буква кодировалась двоичным кодом фиксированной длины 5. В коде Бодо элементы двоичного кода имеют равную длину и именуются посылкой и паузой.
Хотя Морзе принадлежит первая электрическая система цифровой связи (телеграфная связь), начало того, что мы теперь считаем современной теорией цифровой связи, следует из работ Найквиста (1924), исследовавшего проблему определения максимальной скорости передачи, которую можно обеспечить по телеграфному каналу данной ширины полосы частот без межсимвольной интерференции (МСИ). Он сформулировал модель телеграфной системы, в которой передаваемый сигнал имеет общую форму
(1.1)
где g(t) - базовая форма импульса (несущей); {аn} - последовательность данных в двоичном коде (±1), передаваемых со скоростью 1/Гбит/с.
Найквист пытался определить оптимальную форму импульса g(t) с ограниченной полосой W Гц и максимизировать скорость передачи данных в предположении, что импульс не вызывает МСИ в точках отсчёта kT, k = 0,± 1,±2,... Эти исследования привели его к заключению, что максимальная скорость передачи равна 2W отсч./с. Эту скорость теперь называют скоростью Найквиста. Более того, эту скорость передачи можно достичь при использовании импульса g(t) = sin2πWt/(2πWt). Эта форма импульса допускает восстановление данных без межсимвольных помех в выборочные моменты времени. Результат Найквиста эквивалентен версии теоремы отсчётов для сигналов с Ограниченной полосой, который был позже точно сформулирован Шенноном (1948). Теорема отсчётов гласит, что сигнал с шириной полосы частот W может быть восстановлен по его отсчётам, взятым со скоростью Найквиста 2W, путем использования интерполяционной формулы
(1.2)
В продолжение работы Найквиста Хартли (1928) рассмотрел вопрос о количестве данных, которые могут быть переданы надежно по каналу с ограниченной полосой частот, когда для последовательной передачи данных используются импульсы со многими амплитудными уровнями. С учетом шума и другой интерференции Хартли показал, что приемник может надежно оценивать амплитуду принятого сигнала с некоторой точностью . Это исследование привело Хартли к заключению, что имеется максимальная скорость передачи данных по каналу с ограниченной полосой частот, зависящая от максимальной амплитуды сигнала Аmах (фиксированной максимальной мощности) и величины .
Другим значительным вкладом в развитие теории связи была работа Винера (1942), который рассмотрел проблему оценивания полезного сигнала s(f) на фоне аддитивного шума n(f), исходя из наблюдения принимаемого сигнала r(t) = s(t) + n(t) . Эта проблема возникает при демодуляции сигналов. Винер определил линейный фильтр, выход которого является лучшей среднеквадратической аппроксимацией полезного сигнала s(f). Полученный фильтр назван оптимальным линейным (винеровским) фильтром.
Результаты Хартли и Найквиста по максимальной скорости передачи цифровой информации были предшественниками работ Шеннона (1948), который установил математические основы передачи информации по каналам связи и нашел фундаментальные ограничения для систем цифровой связи. В своей пионерской работе Шеннон сформулировал основную проблему надежной передачи информации в терминах статистической теории связи, используя вероятностные модели для информационных источников и каналов связи. Применяя вероятностный подход, он нашёл универсальную логарифмическую меру для количества информации источника. Он также показал, что существует некоторый предельный показатель, характеризующий скорость передачи информации по каналу связи, зависящий от величины мощности передатчика, ширины полосы и интенсивности аддитивного шума, названный им пропускной способностью канала. Например, в случае аддитивного белого (с равномерным спектром) гауссовского шума идеальный частотно-ограниченный канал с шириной полосы W имеет пропускную способность С', бит/с, которая определяется формулой
где Р - средняя мощность сигнала, a nq - спектральная плотность мощности аддитивного шума. Значение параметра пропускной способности канала С' состоит в том, что если информационная скорость (производительность) источника R меньше, чем C'(R < С') , то теоретически возможно обеспечить надёжную (свободную от ошибок) передачу через канал соответствующим кодированием. С другой стороны, если R > С' , то надежная передача невозможна, независимо от способов обработки сигнала на передаче и приеме. Таким образом, Шеннон установил основные ограничения передачи информации и породил новое направление, которое теперь называется теорией информации.
Другой важный вклад в области цифровой связи - это работа Котельникова (1947), который провел тщательный анализ различных систем цифровой связи, основанный на геометрическом представлении.
Исследование Котельникова было позже развито Возенкрафтом и Джекобсом (1965).
Вслед публикациям Шеннона появилась классическая работа Хемминга (1950) по кодам с обнаружением и с исправлением ошибок, которые противодействуют вредному влиянию канального шума. Работа Хемминга стимулировала многих исследователей, которые в последующие годы открыли ряд новых и мощных кодов, многие из которых сегодня внедрены в современные системы связи.
За ранними работами Шеннона, Котельникова и Хемминга появилось много новых достижений в области цифровой связи. Некоторые из наиболее заметных достижений следующие:
разработка новых блоковых кодов Маллером (1954), Ридом (1954) и Соломоном (1960), Боузом и Рой-Чоудхури (1960) и Гоппом (1970)
Данные о дисциплине: Название «Технологии цифровой связи».
По данной дисциплине проводятся лекционные и практические занятия, проводятся лабораторные работы, кроме того, предполагается выполнение курсовая работа, собирается схема с применением пакета «System View» для моделирования телекоммуникационных систем, кодирующего и декодирующего устройства циклического кода с использованием модуляции и демодуляции и проведение самостоятельных работ с целью углубления общих знаний теории.
| Кредиты | Курс | Семестр | Лекции | Практические занятия | Лаборат. работы | Курсовой проект | Экзамен |
| 3 | 3 | 6 | 1.5 (26час.) | 1 (17 час.) | 0.5 (17 час.) | 6 | 6 |
Лекция №1. Элементы систем цифровой связи
Цель лекции: изучение основных элементов систем цифровой связи и классификации сигналов.
Содержание:
а) функциональная схема и основные элементы цифровой системы;
б) цифровые сигналы.
Дата: 2019-12-22, просмотров: 274.