Вид модуляции – ФМ (фазовая модуляция)
Способ приема сигнала – когерентный
Мощность сигнала на выходе приемника (Рс) = 4,2 (В)
Длительность электрической посылки (Т) = 15 10-6 (сек.)
Спектральная плотность помехи (No) = 1 10-5 (Вт/Гц)
Вероятность передачи сигнала “1” Р(1) = 0,90
Число уровней квантования (N) = 128
1. Структурная схема системы связи.
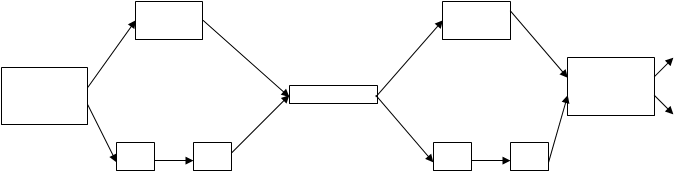
Рис.1.
Источник (передатчик) и получатель (приемник) служат для обмена некоторой информацией. В одном случае отправителем и получателем информации служит человек, в другом случае это может быть компьютер (так называемая телеметрия). При передаче сообщения, сигнал поступает на кодирующее устройство (кодер), в котором происходит преобразование последовательности элементов сообщения в некоторую последовательность кодовых символов. Далее закодированный сигнал проходит через модулятор, в котором первичный (НЧ) сигнал преобразуется во вторичный (ВЧ) сигнал, пригодный для передачи по каналу связи на большие расстояния. Линия связи – это среда, используемая для передачи модулированного сигнала от передатчика к приемнику. Такой средой служат: провод, волновод, эфир). После прохождения по линии связи, сигнал поступает на приемник, в котором происходит обратный процесс. В демодуляторе происходит преобразование принятого приемником модулированного первичного (ВЧ) сигнала во вторичный (НЧ) сигнал. Далее демодулированный сигнал проходит через декодер, в котором восстанавливается закодированное сообщение.
В системах передачи непрерывных сообщений (аналоговая модуляция) решающая схема определяет по вторичному сигналу (ВЧ) наиболее близкий по значению переданный первичный сигнал и восстанавливает его.
Выбор схемы приемника
Система ФМ – является оптимальной, когерентной системой передачи двоичных сигналов. По сравнению С ЧМ – ФМ обеспечивает при одинаковой помехоустойчивости двойной выигрыш по полосе частот и по мощности, занимаемой передаваемым сигналом.
Так как при ФМ необходимо получать информацию о фазе принимаемого сигнала, то при этом приеме в обязательном порядке используют метод когерентного приема.
 |
Рис.2
Ф – полосовой фильтр;
ФД – фазовый детектор;
Г – гетеродин;
ФНЧ - фильтр нижней частоты;
РУ - решающее устройство;
СУ – сравнивающее устройство;
ПЗ – полоса задержки.
В сигналах с фазовой манипуляций (ФМ) знак выходного напряжения определяется фазой принятого сигнала в фазовом детекторе ФД. Под воздействием помехи полярность напряжения может измениться на противоположную, что приводит к ошибке. Это может произойти в том случае, если помеха изменит результирующего колебания относительно ее номинального значения на угол, лежащий в интервале от  до
до  . При оптимальном приеме ФМ сигналов в присутствии гауссовых помех предварительная фильтрация сигналов до фазового детектора не является обязательной, однако в реальных приемниках для подавления помех других видов обычно используют полосовые фильтры Ф с полосой пропускания
. При оптимальном приеме ФМ сигналов в присутствии гауссовых помех предварительная фильтрация сигналов до фазового детектора не является обязательной, однако в реальных приемниках для подавления помех других видов обычно используют полосовые фильтры Ф с полосой пропускания  . Гетеродин Г вырабатывает опорный сигнал, частота и фаза колебаний которого полностью совпадает с частотой и фазой одного из сигналов фазового детектора. При когерентном приеме сравниваются не фазы, а полярности посылок, полученных на выходе ФД. Для сравнения полярностей посылок используются цепь задержки и сравнивающее устройство СУ , на выходе которого образуется положительное напряжение, если предыдущая и настоящая посылки имеют одинаковую полярность и одинаковое напряжение, когда полярности соседних посылок различные. В приведенной схеме колебания гетеродина синхронизируются по фазе принимаемым сигналом при помощи системы синхронизации. Фаза колебаний гетеродина также неоднозначна и имеет два устойчивых состояния 00 и 1800, в отличии от схемы с ФМ, переход фазы под воздействием помех из одного состояния в другое не приводит к обратной работе.
. Гетеродин Г вырабатывает опорный сигнал, частота и фаза колебаний которого полностью совпадает с частотой и фазой одного из сигналов фазового детектора. При когерентном приеме сравниваются не фазы, а полярности посылок, полученных на выходе ФД. Для сравнения полярностей посылок используются цепь задержки и сравнивающее устройство СУ , на выходе которого образуется положительное напряжение, если предыдущая и настоящая посылки имеют одинаковую полярность и одинаковое напряжение, когда полярности соседних посылок различные. В приведенной схеме колебания гетеродина синхронизируются по фазе принимаемым сигналом при помощи системы синхронизации. Фаза колебаний гетеродина также неоднозначна и имеет два устойчивых состояния 00 и 1800, в отличии от схемы с ФМ, переход фазы под воздействием помех из одного состояния в другое не приводит к обратной работе.
Полоса пропускания канальных фильтров:  ; (1)
; (1) 
Определим вероятность ошибки на выходе ФМ приемника, при когерентном приеме сигнала.
 (2)
(2)
где q – отношение сигал/шум, вычисляется по следующей формуле:
 (3)
(3)
Pc – мощность приходящего сигнала;
 - полоса пропускания канальных фильтров;
- полоса пропускания канальных фильтров;
N0 – спектральная плотность помехи.
В данном случае присутствует аддитивная помеха (Белый шум с гауссовским законом распределения).
 ;
;  .
.
В формуле (1) присутствует функция Крампа, выражающей интеграл вероятности (табличное значение). [4].
Находим аргумент функции:  ;
; 
Из таблицы, приведенной в [4] находим, что значение функции крампа при данном аргументе  .
.
Далее подставим найденные значения в формулу (1), в результате получим:
 ;
; 
Построим график зависимости вероятности ошибки от мощности сигнала.
Рис.3
Из приведенного выше графика можно сделать вывод, что с ростом мощности сигнала, вероятность ошибки уменьшается по экспоненциальному закону.
Оптимальная фильтрация.
Отметим, что оптимальный приемник, является корреляционным, сигнал на его выходе представляет собой функцию корреляции принимаемого и ожидаемого сигналов, благодаря чему обеспечивается максимально-возможное отношение сигнал/шум.
Так как определение функции корреляции является линейной, то её можно реализовать в некотором линейном фильтре, характеристики которого являются такими, что отношение сигнал/шум на его выходе получается максимальным. Задача оптимальной фильтрации непрерывного сигнала ставится так, чтобы обработав принятый сигнал, получить на выходе приемника сигнал, наименее отличающийся от переданного сигнала. Решение этой задачи основывается на трех основных предположениях:
1. Сигнал S(t) и помеха w(t) представляют собой стационарные случайные процессы;
2. Операция фильтрации предполагается линейной;
3. Критерием оптимальности считается минимум среднеквадратичной ошибки.
Рассмотрим задачу синтеза фильтров, которые используются в схемах обнаружения и различения дискретных сигналов. Как правило эти фильтры ставятся перед решающим устройством, задача которого – вынести решение в пользу того или иного сигнала. Нужно отметить важное обстоятельство, что при приеме дискретных сигналов нет необходимости заботиться о сохранении формы сигнала. Основная задача – обеспечить минимум ошибочных решений при приеме сигналов. Очевидно, что вероятность ошибочного приема будет уменьшаться. Поэтому при синтезе фильтров для дискретных сигналов используется критерий максимума отношения сигнал/шум на выходе фильтра. Фильтры, удовлетворяющие данному критерию могут называться оптимальными фильтрами, или фильтрами, максимизирующими отношение сигнал/шум.
На вход фильтра с передаточной функцией K(jw) подается смесь сигнала S(t) и помехи n(t). Полагаем сигнал полностью известным, неизвестным считается лишь факт его присутствия. Известны также статистические характеристики шума (помехи). Требуется синтезировать такой фильтр (т.е. Копт(jw)), который обеспечивал бы на выходе в заданный момент времени (момент принятия решения) t0 наибольшее отношение пикового значения сигнала y(t0) к среднеквадратичному шуму sn:
 (3.1.)
(3.1.)
Рассмотрим случай, когда шум на входе фильтра имеет равномерный энергетический спектр G(w)=n02 (белый шум). Сигнал может быть задан своей временной функцией S(t) или комплексным спектром.

комплексный коэффициент передачи фильтра представим в форме:

тогда для сигнала и дисперсии шума на выходе фильтра можно записать:
 (3.2.)
(3.2.)
 (3.3.)
(3.3.)
Примем t0 – как некоторый фиксированный момент времени, при котором амплитуда на выходе фильтра достигает своего максимального значения. Для этого значения времени получим:
 (3.4.)
(3.4.)
отношение квадрата пикового значения сигнала к дисперсии шума в момент времени t0 будет равно:
 (3.5.)
(3.5.)
Дальше задача сводиться к отысканию коэффициента передачи Kопт(jw), обеспечивающего максимум значения h2. Для этого можно воспользоваться неравенством Шварца-Буняковского для комплексных функций.
 (3.6.)
(3.6.)
данное неравенство превращается в равенство только при условии:
 , где а – некоторая постоянная. (3.7.)
, где а – некоторая постоянная. (3.7.)
Подставляя неравенство (3.6.) в (3.7.), замечаем, что максимум величины h2 обеспечивается при выполнении условия:
 (3.8.)
(3.8.)
из последнего выражения получим:
K(w)=aS(w), jK(w)+ jS(w)+wt0=0
Откуда находим:
jK(w)+ jS(w)+wt0=0
jK(w)=- jS(w)-wt0.
Таким образом, передаточная функция оптимального фильтра должна определяться выражением:
 (3.9.), где * обозначает комплексно-сопряженную величину. Тогда отношение сигнал/шум в момент времени t0 будет равно:
(3.9.), где * обозначает комплексно-сопряженную величину. Тогда отношение сигнал/шум в момент времени t0 будет равно:
 , где E – энергия сигнала на входе фильтра. Величина hm2 определяется только энергией сигнала и не зависит от его формы.
, где E – энергия сигнала на входе фильтра. Величина hm2 определяется только энергией сигнала и не зависит от его формы.
Пояснения к полученным результатам.
АЧХ оптимального фильтра отличается постоянным множителем от амплитудного спектра сигнала, поэтому оптимальный фильтр пропускает различные частотные составляющие сигнала неравномерно с тем большим ослаблением, чем меньше интенсивность этих составляющих, в результате полная мощность шума на выходе фильтра получается меньшей, чем при равномерной АЧХ.
Заметим, что член выражения wt0 для фазовой характеристики означает сдвиг во времени на величину t0 всех частотных составляющих сигнала. Приведенные равенства означают, что в момент времени t0 все спектральные составляющие сигнала фильтра имеют одну и ту же начальную фазу. Оптимальный фильтр обеспечивает компенсацию начальных фаз составляющих сигнала. Складываясь в фазе, спектральные составляющие сигнала образуют в момент времени t0 пиковый выброс выходного сигнала. На составляющие шума, имеющие случайные начальные фазы, оптимальный фильтр таково влияния не оказывает.
Вследствие этих двух причин оптимальный фильтр обеспечивает максимум пикового напряжения сигнала к среднеквадратичному значению шума.
Так как частотные характеристики оптимального фильтра, обеспечивающего максимум отношения сигнал/шум, полностью определяются спектром (т.е. формой) сигнала, то говорят, что они согласованы с сигналом, а такой фильтр называют согласованным для данного сигнала. Следует отметить, что оптимальный фильтр для сигнала S(t) будет являться оптимальным и для всех сигналов той же формы, но отличающихся от него амплитудой, временным положением и начальной фазой заполнения (для радиоимпульсов).
Полученные выше результаты относятся к случаю приема сигналов с белым шумом. Рассматривая более общий случай, когда шум имеет неравномерную спектральную плотность Gn(w), можно показать, что передаточная функция оптимального фильтра должна определяться выражением
 (3.10.)
(3.10.)
Оптимальный фильтр в этом случае можно представить в виде последовательного соединения двух фильтров. Первый из них имеет амплитудно-частотную характеристику  , его назначение – “обелить” шум, который поступает на вход фильтра. Второй фильтр с передаточной характеристикой K2(jw) является оптимальным для искаженного сигнала (после первого фильтра), но уже при белом шуме.
, его назначение – “обелить” шум, который поступает на вход фильтра. Второй фильтр с передаточной характеристикой K2(jw) является оптимальным для искаженного сигнала (после первого фильтра), но уже при белом шуме.
Здесь интересно отметить следующее обстоятельство.Если квадрат амплитудно-частотного спектра сигнала совпадает по форме со спектральной плотностью шума, т.е.  , то АЧХ оптимального фильтра должна быть равномерной (K(w)=K=const).
, то АЧХ оптимального фильтра должна быть равномерной (K(w)=K=const).
Определим импульсную переходную функцию согласованного фильтра. Импульсной переходной функцией называется отклик цепи на короткий импульс (дельта-функция). Она связана с передаточной характеристикой преобразование Фурье:
 (3.11.)
(3.11.)
Так как для согласованного фильтра  , то для g(t) получим
, то для g(t) получим
 (3.12)
(3.12)
Таким образом, импульсная переходная функция согласованного фильтра для сигнала S(t) отличается от временной функции, описывающей этот сигнал, только постоянным множителем, смещением во времени на величину t0 и знаком аргумента t. Другими словами, импульсная переходная функция согласованного фильтра является зеркальным отражением временной функции сигнала, сдвинутым на величину t0.
 |  |  | |||
Величина t0 выбирается из условия физической реализуемости фильтра, согласно которому отклик цепи не может опережать воздействие. Если на вход фильтра подается дельта-функция в момент времени t=0, то отклик (импульсная реакция) фильтра может появиться лишь при t>0. Только при выполнении этого условия может быть использована вся энергия сигнала для создания пикового выброса в момент времени t=t0. Обычно выбирают t0=T. Можно сделать вывод, что согласование сигналов возможно лишь для сигналов конечной длительности, т.е. импульсных сигналов.
4. Передача аналоговых сигналов методом ИКМ.
Согласно теореме отсчетов непрерывный сигнал можно передавать мгновенными значениями этого сигнала (отсчетами), следующими с определенной частотой повторения. Последняя должна быть больше не менее, чем в 2 раза передаваемой частоты входного сигнала. Такое представление сигала во времени называется дискретизацией.
Информация о мгновенном значении входного непрерывного сигнала может быть передана в сторону приемника непосредственно в форме отсчетов – амплитудно-модулированных импульсов, взятых в определенные временные моменты, причем длительность импульсов, как правило очень мала по сравнению с периодом их повторения. В интервалах между двумя соседними отсчетами одного сигнала последовательно во времени можно разместить отсчеты других передаваемых сигналов, а на приемной стороне эти отсчеты распределить между каналами.
В основе амплитудно-импульсной модуляции (АИМ) лежит передача сигналов в виде импульсов, промодулированных по амплитуде. Под влиянием помех, возникающих в тракте передачи, происходят случайные изменения формы и амплитуды передаваемых импульсов, что при восстановлении исходного непрерывного сигнала проявляется в виде дополнительного шума. Физически уменьшение этого шума возможно лишь за счет снижения уровня помех в тракте передачи, что практически приводит к уменьшению дальности связи.
Изменение амплитуды однако можно передавать в виде изменения длительности импульсов. Амплитуда широтно-модулированных импульсов (ШИМ) постоянно, при этом удается снизить влияние внешних помех при передаче импульсов, что дает возможность значительно увеличить дальность связи.
Передача информации путем изменения положения импульса постоянной амплитуды и длительности лежит в основе время-импульсной модуляции (ВИМ).
 |
Описанные виды импульсной модуляции (АИМ, ШИМ, ВИМ) соотносятся как обычные (АМ, ЧМ, ФМ) и являются аналоговыми методами импульсной модуляции, общим недостатком которых являются жесткие требования к параметрам линии связи, т.к. помехи, которые накладываются на передаваемый модулированный импульс, изменяют его форму, что в приемнике отражается как дополнительный шум. Этот шум значительно увеличивается при передаче информации на большие расстояния, т.к. искажения импульсов отдельных участков складываются. Технические ограничения, накладываемые на приведенные выше способы импульсной модуляции вели к дальнейшему поиску способов , при которых для передачи информации можно было полностью перейти к чисто цифровой форме сигнала, передаваемого по тракту передачи. Результатом этого поиска явилась импульсно-кодовая модуляция (ИКМ).
4.1. Принцип ИКМ.
Входной непрерывный сигнал x=f(t) дисккретизируется в соответствии с теоремой отсчетов, а амплитуда АИМ импульсов, отображающая мгновенное значение входного сигнала в момент дискретизации, преобразуется кодером в двоичные числа. Так как число символов n в двоичном числе, отражающем амплитуду импульса, ограничено, то ограничено и число цифр, позволяющих обозначить амплитуду соответствующего импульса. Поэтому кодер не может в большинстве случаев точно закодировать амплитуду импульсов, а производит “округление” до ближайшей нормированной амплитуды, которая может быть передана двоичным числом с ограниченным количеством разрядов. Отсюда следует, что кодер должен последовательно переводить непрерывно изменяющиеся амплитуды АИМ импульсов в квантованные по уровню АИМ импульсы и кодировать, т.е. выражать их через дискретно-квантованные по уровню величины в двоичном коде. Группа двоичных символов, которая используется для передачи одной дискретно-квантованной амплитуды, называется кодовой группой (кодовое слово). Число уровней квантования в кодовой группе с количеством разрядов n равно:
N=2n
, тогда число разрядов, при известном количестве уровней квантования будет равно:  , при N=128
, при N=128  .
.
Дискретизация сигнала.
Дискретизация – первый шаг при преобразовании аналогового сигнала в цифровую форму. На входе декодера она появляется в виде АИМ импульсов, поступающих на выход через фильтр нижних частот.
Форма амплитудно-модулированных импульсов может быть различной и зависит от схемы дискретизатора и способов кодирования и декодирования. При передаче необходимо получать как можно более узкие импульсы отсчетов, чтобы в интервалах между ними разместить отсчеты сигналов остальных каналов система, а при приеме, наоборот, как можно более широкие импульсы отсчетов, так как мощность низкочастотного сигнала на входе приемника зависит от энергии импульсов отсчетов, восстановленных на выходе декодера.сигнал на выходе АИМ ключа – самая простая форма дискретизированного сигнала, у которого вершины импульсов повторяют форму исходного непрерывного сигнала.
Передача аналоговых сигналов цифровыми методами сопровождается шумом квантования, возникающим из-за деления динамическогодиапазона кодека на конечное число дискретных величин (ступеней квантования).
Предположим, что весь динамический диапазон кодера y1,y2,…,yk, …yN-1,yN… разделен на N одинаковых ступеней квантования D. В центре каждой ступени расположен уровень, значение которого или его порядковый номер. Кодер в процессе кодирования может выразить двоичным числом. Обозначим эти уровни квантования через y1, y2, …,yk, …, yN. Далее предположим, что максимальное значение непрерывного входного сигнала x=f(t) не превышает общего динамического диапазона кодера (это предположение исключает дополнительные шумы из-за ограничения сигналов) и в каждый момент ti достигает xi=f(t). При выполнении операции квантования возникает ошибка квантования di=xi-yk, где yk – ближайший уровень квантования.
Качество передачи в системах с ИКМ оценивается отношением мощности сигнала к мощности шума квантования , дБ
 (4.2.1.)
(4.2.1.)
качество повышается при увеличении шагов квантования.
Мощность шума квантования можно найти из выражения:
Pкв= D2/12, где D - ступени квантования. D=128, тогда  Ркв=1365
Ркв=1365
Вычислим отношение мощности сигнала к мощности шума квантования.
 дБ.
дБ.
Сравнение аналоговых импульсных видов модуляции (АИМ, ШИМ, ВИМ) с ИКМ позволяет сделать следующие выводы:
- Информация о мгновенных параметрах входного непрерывного сигнала при аналоговых импульсных видах модуляции передается при непрерывном изменении аналоговых величин (амплитуды, длительности, временного положения) импульса. Длительность действия систем передачи с этими видами модуляции, как правило, ограничена искажениями, возникающими в процессе передачи, главной причиной которых является чувствительность передаваемого сигнала к внешним помехам;
- Информация о мгновенных параметрах непрерывного сигнала в системах с ИКМ передается в виде двоичных чисел (кодовых групп), представленных последовательностью импульсов одинаковой формы и амплитуды. Так как искажения этих импульсов при условии безошибочной регенерации не влияют на качество передачи и их сравнительно легко регенерировать, то практически можно достичь независимости качества передачи входного непрерывного сигнала от дальности связи. Необходимо помнить, что при ограничении числа уровней квантования входного непрерывного сигнала появляется дополнительный шум. Кроме того, цифровые системы передачи по сравнению с аналоговыми занимают более широкую полосу частот, что объясняется заменой аналогового сигнала группой импульсов.
Количество информации
Всякая система связи строится для передачи сообщений от источников к потребителю. При этом каждое сообщение имеет свое содержание и определенную ценность для потребителя. Однако для канала связи существенным является лишь тот факт, что в передаваемом сообщении содержится какое-то количество информации.
Информация представляет собой совокупность сведений, которые увеличивают знания потребителя о том или ином объекте, от которого получены эти сведения.
Для того, чтобы иметь возможность сравнивать различные каналы связи, необходимо иметь некоторую количественную меру, позволяющую оценить содержащуюся в передаваемом сообщении информацию. Такая мера в виде количества передаваемой информации была введена К.Шенноном.
В реальных источниках сообщений выбор элементарного сообщения является для потребителя случайным событием и происходит с некоторой априорной вероятностью P(xk). Очевидно, что количество информации, содержащееся в сообщениях xK, должно являться некоторой функцией этой вероятности
 (5.1.1)
(5.1.1)
Функция j при этом удовлетворять требованию аддитивности, согласно которому n одинаковых сообщений должны содержать в n раз большее количество информации. Для измерения количества информации принято использовать логарифмическую функцию, практически наиболее удобную и отвечающую требованию аддитивности.
 (5.1.2.)
(5.1.2.)
Таким образом, определение количества информации в элементарном сообщении xK сводится к вычислению логарифма вероятности появления (выбора) этого сообщения.
В технике связи наиболее часто используются двоичные коды. В этом случае за единицу информации удобно принять количество информации, содержащееся в сообщении, вероятность выбора которого равна  . Эта единица информации называется двоичной или битом.
. Эта единица информации называется двоичной или битом.
В некоторых случаях более удобным является натуральный логарифм. Одна натуральная единица соответствует количеству информации, которое содержится в сообщении с вероятностью выбора  .
.

Из формулы следует, что сообщение содержит тем большее количество информации, чем меньше вероятность его появления.
Коды с обнаружением ошибок.
Одним из кодов подобного типа является код с четным числом единиц. Каждая комбинация этого кода содержит помимо информационных символов – один контрольный, выбираемый равный 0 или 1 так, чтобы сумма количества единиц в комбинации всегда была четной.
Простейшим примером кода с проверкой на четность является код Бодо, в котором к пятизначным комбинациям информационных символов добавляется шестой контрольный символ: 11001,1; 10001,0. Правило вычисления контрольного символа находится как:
 (6.1.1.)
(6.1.1.)
откуда вытекает, что для любой комбинации сумма всех символов по модулю два будет равна нулю. Это позволяет в декодирующем устройстве сравнительно просто производить обнаружение ошибок путем проверки на четность. Нарушение четности имеет место при появлении однократных, трехкратных и в общем случае нечетной кратности, что и дает возможность их обнаружить. Появление четных ошибок не изменяет четности суммы, поэтому такие ошибки не обнаруживаются.
Определим избыточность кода:
k=6 – число символов в помехоустойчивом коде
n=5 – число символов без избыточности
Далее найдем вероятность необнаруженной кодом ошибки при независимых однократных ошибках . Для этого найдем число ошибочных комбинаций.


Заключение
В данной работе было рассмотрено:
1. Система когерентного приемника с ФМ. Рассчитав параметры и сравнив полученные в результате расчетов данные с другими системами приема сигналов выявлены некоторые преимущества и недостатки данной системы передачи и приема информационных сообщений. Также было проведено сравнение с идеальным приемником Котельникова, обеспечивающим потенциальную помехоустойчивость. Отмечено как можно улучшить характеристики приемника с помощью согласованных фильтров.
2. Передача непрерывных аналоговых сигналов цифровыми методами. Произведен анализ и сравнение дискретных методов (АИМ, ШИМ, ВИМ) с цифровым методом передачи непрерывных аналоговых сигналов ИКМ. Отмечены преимущества цифровых методов передачи информации по сравнению с аналоговыми.
3. Кодирование сообщений. Сравнивались и определялись характеристики статистического (эффективного кодирования) по сравнению с помехоустойчивым (избыточным) кодированием. Была определена пропускная способность канала связи и установлено, что данная система является работоспособной (т.е. выполняется условие К.Шеннона).
При рассмотрении передачи и приема сигналов методом ИКМ с кодированием сообщений, можно сделать вывод, что для повышения качества получаемых сообщений следует применять помехоустойчивое кодирование. Рассмотренный метод помехоустойчивого кодирования является самым простейшим. Для более эффективного использования канала связи нужно использовать более совершенные алгоритмы кодирования сообщений.
Литература
1. Зюко А.Г., Коробов Ю.Ф. Теория передачи сигналов – М.Связь 1972.
2. Б.Н.Бондарев, А.А.Макаров “Основы теории передачи сигналов” Новосибирск – 1969 г.
3. Э.Прагер, Б.Шимек, В.П.Дмитриев – “Цифровая техника в связи” – М. Радио и связь.
4. Дж. Кларк,мл.,Дж.Кейн “Кодирование с исправлением ошибок в системах цифровой связи” – М. Радио и связь.
5. В.Н.Кудашов “Методические указания к выполнению курсовой работы по теории передачи сигналов” .
6. Конспект лекций.
Вид модуляции – ФМ (фазовая модуляция)
Дата: 2019-07-30, просмотров: 61.