А.И. Бабкин, А.С. Морозов
КИНЕМАТИЧЕСКИЕ РАСЧЕТЫ
ОБЩЕПРОМЫШЛЕННОГО ПРИВОДА
Учебно-методическое пособие для курсового проектирования
Северодвинск
2011
УДК 621.81
Бабкин А.И., Морозов А.С. Кинематические расчеты общепромышленного привода. Учебно-методическое пособие для курсового проектирования. – Северодвинск, РИО Севмашвтуза, 2011. – 33 с.
Ответственный редактор: к.т.н., доцент А.В. Руденко.
Рецензенты: к.т.н., доцент Д.В. Кузьмин;
Генеральный директор ЗАО НТЦ «Базис» В.А. Базанов.
Учебно-методическое пособие «Кинематические расчеты общепромышленного привода» предназначено для студентов технических специальностей, выполняющих курсовой проект «Проектирование общепромышленного привода» при изучении дисциплины «Детали машин и основы конструирования».
Учебно-методическое пособие содержит теоретический и практический материал, необходимый для определения кинематических и силовых параметров проектируемого привода.
Печатается по решению редакционно-издательского совета Севмашвтуза.
ISBN 5-7723- Ó Севмашвтуз, 2011 г.
Оглавление
Введение.......................................................................................................... 3
1 Предварительные расчеты и анализ работы привода............................... 4
1.1 Исходные данные................................................................................. 4
1.2 Анализ работы привода...................................................................... 4
1.3 Срок службы привода......................................................................... 5
2 Кинематические и силовые расчеты привода............................................. 6
2.1 Выбор электродвигателя..................................................................... 6
2.2 Разбивка передаточного числа привода............................................. 9
2.3 Расчет кинематических и силовых параметров привода................... 13
3 Пример выполнения расчетов..................................................................... 15
Приложение 1 Общие сведения об асинхронных электродвигателях
общепромышленного применения............................................................ 21
Приложение 2 Характеристики асинхронных трехфазных электродвигателей
с короткозамкнутым ротором общепромышленного применения......... 25
Список литературы......................................................................................... 33
Введение
Данное пособие является первым в серии учебно-методических пособий, предназначенных для помощи студентам при курсовом проектировании по теме «Проектирование общепромышленного привода».
В данных пособиях будут рассматриваться вопросы проектирования приводных устройств конвейеров, грузовых тележек, лебедок, подъемников, питателей, смесителей и других средств механизации, широко применяемых в различных отраслях промышленности и использующие большинство деталей и узлов общемашиностроительного применения.
Пособие «Кинематические расчеты» затрагивает вопросы проектирования на предварительном этапе. В нем описан выбор электродвигателя, даны рекомендации по разбивке передаточного числа привода по ступеням, приведен пример расчета параметров привода. В приложении приведены характеристики асинхронных трехфазных электродвигателей, рекомендованных для применения в приводных устройствах.
1 Предварительные расчеты и анализ работы привода
Основные требования, предъявляемые к создаваемому приводу: требуемая производительность, надежность, технологичность, ремонтопригодность, минимальные габариты и масса, безопасность, удобство эксплуатации, экономичность, техническая эстетика. Этими требованиями следует руководствоваться при принятии конструктивных решений на всех этапах проектирования.
Исходные данные
Исходными данными при проектировании привода являются:
· кинематическая схема привода, его примерная компоновка;
· срок службы L;
· условия эксплуатации привода.
Дополнительно для приводов ленточных транспортеров:
· скорость движения конвейера v;
· тяговое усилие F;
· диаметр барабана D.
Для приводов цепных транспортеров:
· скорость движения конвейера v;
· тяговое усилие F;
· число зубьев тяговой звездочки z;
· шаг тяговой цепи t.
Для приводов поворотных платформ:
· Вращающий момент T;
· Скорость вращения платформы n вых;
· Диаметр платформы D.
Анализ работы привода
Выполнение работы следует начинать с изучения схемы привода.
По выданному заданию необходимо проанализировать назначение привода и условия его работы, изучить конструкцию его элементов по атласам или другой подобной литературе. В задании дано место использования привода и определены условия его эксплуатации – количество рабочих смен, интенсивность использования, характер рабочей нагрузки, реверсивность и т.д.
Приводные устройства включают электродвигатель, одно-, двух- или трехступенчатые редукторы, открытые передачи (ременные, цепные) и муфты. Проектируемый привод будет массового или единичного производства малой или средней мощности, имеющий постоянную или мало меняющуюся нагрузку.
Двигатель и редуктор являются основными элементами проектируемого привода. Заданием предусмотрено проектирование цилиндрических, коническо-цилиндрических или червячных редукторов.
Для проектируемых приводов рекомендуется использовать асинхронные трехфазные двигатели. Эти двигатели наиболее универсальны. Они имеют закрытое и обдуваемое исполнение, что позволяет применять их для работы в загрязненных условиях, на открытых площадках и т.п. Двигатели используются для приводов механизмов, имеющих постоянную или маломеняющуюся нагрузку при длительном режиме работы, имеют повышенные пусковые моменты. Они могут работать в любом направлении, обеспечивая при необходимости реверсивность привода.
Срок службы привода
Срок службы (ресурс)  , ч, определяется по формуле:
, ч, определяется по формуле:
 ,
,
где  – срок службы привода, лет;
– срок службы привода, лет;
 – количество рабочих дней в году ( = 250 или 365 дней при пятидневной или семидневной рабочей неделе соответственно, в зависимости от характера производства);
– количество рабочих дней в году ( = 250 или 365 дней при пятидневной или семидневной рабочей неделе соответственно, в зависимости от характера производства);
 – коэффициент годового использования (если не указан в задании, то
– коэффициент годового использования (если не указан в задании, то  = 1);
= 1);
 – количество смен ( = 1, 2 или 3 смены);
– количество смен ( = 1, 2 или 3 смены);
 – продолжительность смены ( = 8 часов);
– продолжительность смены ( = 8 часов);
 – коэффициент загрузки за смену.
– коэффициент загрузки за смену.
Так как в задании не сказано о характере изменения тягового усилия F за время эксплуатации, считаем как самый неблагоприятный вариант, что режим нагрузки – постоянный, т.е. за все время работы привода рабочая нагрузка не меняется, и равна тяговому усилию F.
2 Кинематические и силовые расчеты привода
Выбор электродвигателя
2.1.1 Требуемая мощность привода:
для транспортеров:
 ,
,
для поворотных платформ:
 ,
,
где  – требуемая мощность привода, кВт;
– требуемая мощность привода, кВт;
F – тяговое усилие на конвейере, кН;
v – скорость движения конвейера, м/с;
T – вращающий момент, кН×м;
w – угловая скорость вращения платформы, сек –1;
 – скорость вращения платформы, об/мин.
– скорость вращения платформы, об/мин.
2.1.2 Требуемая мощность электродвигателя:
 ,
,
где  – требуемая мощность электродвигателя, кВт;
– требуемая мощность электродвигателя, кВт;
 – КПД привода;
– КПД привода;
 – КПД отдельных звеньев кинематической цепи, примерные значения которых приведены в таблице 1.1.
– КПД отдельных звеньев кинематической цепи, примерные значения которых приведены в таблице 1.1.
Таблица 1.1
Значения КПД элементов привода
| Тип элемента привода | 
|
| Зубчатая передача (закрытая): цилиндрическая коническая | 0,97…0,99 0,96…0,98 |
| Зубчатая передача (открытая): цилиндрическая коническая | 0,93…0,95 0,92…0,94 |
| Червячная передача (закрытая): | 
|
| Ременная передача: с плоским ремнем с клиновыми (поликлиновым) ремнями | 0,96…0,98 0,95…0,97 |
| Цепная передача: открытая закрытая | 0,92…0,95 0,94…0,96 |
| Муфта соединительная | 0,98 |
| Подшипники качения (одна пара) | 0,99 |
Примечание: КПД червячных передач сильно зависит от передаточного числа, которое на данном этапе проектирования неизвестно, поэтому предварительно рекомендуется принять  . После окончательного определения передаточного числа следует уточнить КПД червячного редуктора и всего привода.
. После окончательного определения передаточного числа следует уточнить КПД червячного редуктора и всего привода.
2.1.3 Подбор электродвигателей
Двигатель подбирается по передаваемой мощности. Условие выбора:
 ,
,
где  – мощность двигателя по каталогу.
– мощность двигателя по каталогу.
Для асинхронных двигателей допускается перегрузка 8% – при постоянной нагрузке, и 12% – при переменной нагрузке.
В большинстве случаев можно подобрать несколько электродвигателей требуемой мощности, с разными скоростями вращения. Данные о выбранных электродвигателях необходимо свести в таблицу 1.2.
Если мощность двигателя по каталогу  больше требуемой мощности
больше требуемой мощности  , то расчетная мощность двигателя
, то расчетная мощность двигателя  . Если двигатель работает с перегрузкой (
. Если двигатель работает с перегрузкой (  ), то
), то  .
.
Таблица 1.2
Параметры выбранных электродвигателей
| Обозначение электродвигателя | Мощность P , кВт | nэд. ном., об/мин | uпривода | |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 |
2.1.4 Передаточное число привода
Передаточное число привода для каждого варианта электродвигателя:
 ,
,
где  – частота вращения приводного вала рабочей машины:
– частота вращения приводного вала рабочей машины:
для ленточных транспортеров, грузоподъемных и прочих машин:
 ,
,
для цепных транспортеров:
 ,
,
где  – линейная скорость тягового органа, м/сек;
– линейная скорость тягового органа, м/сек;
D – диаметр барабана, мм;
t – шаг тяговой цепи для цепных транспортеров, мм;
z – число зубьев тяговой звездочки.
Для поворотных платформ  указано в задании.
указано в задании.
2.1.5 Определение диапазона передаточных чисел привода
Передаточное число привода равняется произведению передаточных чисел составляющих его ступеней:
 .
.
Количество ступеней в приводе и виды передач определены в задании. Если в кинематической схеме передачи какого-либо одного вида встречается более одного раза (например, в двухступенчатом зубчатом редукторе), то обычно их различают как быстроходная и тихоходная ступени.
Рекомендованные и предельные значения передаточных чисел различных передач приведены в таблице 1.3.
Таблица 1.3
Рекомендуемые и предельные значения передаточных чисел
механических передач
| Вид передачи | Твердость зубьев | Передаточное число | |

| 
| ||
| Закрытая цилиндрическая зубчатая: | |||
| тихоходная ступень во всех редукторах ( | £ 350 HB | 2,5…5,6 | до 6,3 |
| 40…56 HRC | 2,5…5,6 | до 6,3 | |
| 56…63 HRC | 2…4 | до 5,6 | |
| быстроходная ступень в редукторах по развернутой схеме ( | £ 350 HB | 3,15…5,6 | до 8 |
| 40…56 HRC | 3,15…5,6 | до 7,1 | |
| 56…63 HRC | 2,5…4 | до 6,3 | |
| быстроходная ступень в соосном редукторе ( | £ 350 HB | 4…6,3 | до 8 |
| 40…56 HRC | 4…6,3 | до 7,1 | |
| 56…63 HRC | 3,15…5 | до 6,3 | |
| Открытая цилиндрическая зубчатая | £ 350 HB | 3…7 | до 16 |
| Коробка передач | любая | 1…2,5 | до 3,1 |
| Закрытая коническая зубчатая | £ 350 HB | 1…4 | до 6,3 |
| ³ 40 HRC | 1…4 | до 5 | |
| Открытая коническая зубчатая | £ 350 HB | 2…4 | до 8 |
| Червячная | – | 16…50 | 8…80 |
| Ременная с клиновыми и поликлиновыми ремнями | – | 2…4 | 1,5…8 |
| Цепная | – | 1,5…5 | до 10 |
 )
) )
) )
)По табличным данным можно определить диапазон, в котором будет находится передаточное число привода.
 ,
,  .
.
В исключительных случаях в качестве минимальной или максимальной величины можно принимать предельные значения передаточного числа.
Передаточное число привода должно находится внутри этого диапазона:

Варианты приводов, передаточное число которых не попадает в указанный диапазон можно исключить из рассмотрения. Из оставшихся вариантов необходимо выбрать один, обеспечивающий минимальные габариты и массу (следовательно, и стоимость) привода.
Обычно из оставшихся вариантов выбирают электродвигатель с меньшей частотой вращения, так как этот вариант имеет меньшее передаточное число привода, и, следовательно, меньшую массу и габариты. Кроме того, следует помнить, что чем меньше скорости вращения в приводе, тем меньше износ, шум, вибрация. Поэтому при всех одинаковых параметрах следует отдавать предпочтение вариантам с электродвигателями с меньшими скоростями вращения, хотя они больше по габаритам, массе и стоимости. Но проигрыш в массе электродвигателя, как правило, гораздо меньше, чем выигрыш в массе механических передач всего привода.
Пример выполнения расчетов
Предварительные расчеты
3.1.1 Исходные данные:
· скорость движения конвейера v, м/сек 0,65;
· тяговое усилие F, кН 12;
· диаметр барабана D, мм 210;
· Ширина ленты B, мм 500;
· Высота транспортера H, мм 900;
· срок службы L, лет 8.
Кинематическая схема привода:
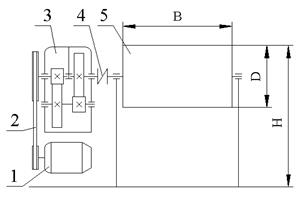
| 1. Электродвигатель 2. Клиноременная передача 3. Двухступенчатый соосный редуктор вертикальной компоновки 4. Муфта 5. Барабан транспортера |
Условия эксплуатации привода: Транспортер предназначен для перемещения штучных грузов на производстве. Режим работы спокойный, с незначительными рывками. Работа 2 смены, коэффициент загрузки за смену 0,99. Условия работы – в отапливаемом помещении. Выпуск крупносерийный.
Срок службы привода
 = 8×250×1×2×8×0,99 = 31680 ч,
= 8×250×1×2×8×0,99 = 31680 ч,
где  = 8 лет – срок службы привода;
= 8 лет – срок службы привода;
 = 250 – количество рабочих дней в году;
= 250 – количество рабочих дней в году;
 = 1 – коэффициент годового использования;
= 1 – коэффициент годового использования;
 = 2 – количество смен;
= 2 – количество смен;
 = 8 часов – продолжительность смены;
= 8 часов – продолжительность смены;
 = 0,99 – коэффициент загрузки за смену.
= 0,99 – коэффициент загрузки за смену.
Кинематический расчет
Определение КПД привода
 = 0,96×0,972×0,98×0,994 = 0,8503,
= 0,96×0,972×0,98×0,994 = 0,8503,
где  = 0,96 – КПД клиноременной передачи;
= 0,96 – КПД клиноременной передачи;
 = 0,97 – КПД закрытой зубчатой цилиндрической передачи;
= 0,97 – КПД закрытой зубчатой цилиндрической передачи;
 = 0,98 – КПД муфты;
= 0,98 – КПД муфты;
 = 0,99 – КПД пары подшипников;
= 0,99 – КПД пары подшипников;
3.2.3 Требуемая мощность электродвигателя:
 = 9,173 кВт.
= 9,173 кВт.
По таблице 1 приложения подбираем подходящие по мощности электродвигатели и заносим в таблицу 2.1.
Таблица 2.1
Параметры выбранных электродвигателей
| Обозначение электродвигателя | Мощность P, кВт | nэд. ном., об/мин | uпривода | |
| 1 | 4АМ132М2 | 11 | 2900 | 49,06 |
| 2 | 4АМ132М4 | 1460 | 24,70 | |
| 3 | 4АМ160S6 | 975 | 16,49 | |
| 4 | 4АМ160М8 | 730 | 12,35 |
3.2.4 Частота вращения вала барабана транспортера:
 = 59,115 об/мин,
= 59,115 об/мин,
где  = 0,65 м/сек – линейная скорость ленты транспортера;
= 0,65 м/сек – линейная скорость ленты транспортера;
D = 210 мм – диаметр барабана.
3.2.5 Передаточное число привода для каждого варианта электродвигателя:
 ,
,
для 1-го варианта:
 = 49,06;
= 49,06;
для 2-го варианта:
 = 24,70;
= 24,70;
для 3-го варианта:
 = 16,49;
= 16,49;
для 4-го варианта:
 = 12,35.
= 12,35.
Так как привод состоит из клиноременной передачи и двухступенчатого зубчатого цилиндрического соосного редуктора, то передаточное число привода:

Рекомендованный диапазон передаточных чисел для каждой ступени (по таблице 3 данного пособия):
· клиноременная передача  = 2…4;
= 2…4;
· цилиндрическая зубчатая, быстроходная ступень в соосном редукторе  = 4…6,3;
= 4…6,3;
· цилиндрическая зубчатая, тихоходная ступень  = 2,5…5,6.
= 2,5…5,6.
Передаточное число привода будет находиться в диапазоне:
 ,
,  .
.
Из выбранных электродвигателей 3 и 4 варианты не попадают в указанный диапазон. Их исключаем из дальнейшего рассмотрения. Из оставшихся 2 вариант имеет значительно меньшее передаточное число привода и меньшую частоту вращения. Следовательно, привод с данным электродвигателем будет иметь меньшие габариты и массу, а также меньше изнашиваться, меньше будет шум, вибрация.
Таким образом, выбираем электродвигатель 4АМ132М4У3 ТУ 16-510.781-81,  = 1460 об/мин. Требуемое передаточное число привода при использовании этого электродвигателя:
= 1460 об/мин. Требуемое передаточное число привода при использовании этого электродвигателя:  =24,7.
=24,7.
Приложение 1
АИХХ ХХХ ХХХ-ХХХ:
А - асинхронный электродвигатель
И - унифицированная серия (И - Интерэлектро);
Х - привязка мощностей установочным размерам:
Р - по РС 3031-71;
С - по CENELEK док. 28/64 (для оборудования по евростандартам);
Х - дополнительные буквы для исполнений электродвигателя:
Р - с повышенным пусковым моментом;
С - с повышенным скольжением;
В - встраиваемые;
XXX - габарит, мм;
Х - установочный размер по длине станины (S,M,L);
Х - длина сердечника статора (А или В, отсутствие буквы означает одну длину в установочном размере);
Х - число полюсов: 2, 4, 6, 8 (10, 12). Число полюсов многоскоростных двигателей указывается через дробь: 8/4/2;
X - дополнительные буквы для модификаций электродвигателя:
Б - со встроенной температурной защитой;
Е - со встроенным тормозом;
Е2 - с ручным растормаживающим устройством;
Ж - электродвигатели для центробежных моноблочных насосов (со специальным удлиненным выходным концом вала);
П - повышенной точности по установочным размерам;
Ф - хладономаслостойкое исполнение;
Х2 - химически стойкие;
РЗ - для мотор-редукторов (со специальным валом);
А - для атомных электростанций;
С - сельскохозяйственные;
Ш - для промышленных швейных машин (улучшенного охлаждения).
XX - климатическое исполнение электродвигателя (У, Т, ХЛ) и категория размещения (1, 2, 3, 4, 5).
Структура условного обозначения электродвигателей серии 4А, 4АМ:
Структура обозначения двигателя на примере: 4АМ100 L 2У3.
4 – порядковый номер серии;
А – вид двигателя (асинхронный);
А – станина и щиты двигателя алюминиевые (отсутствие знака означает, станина и щиты чугунные или стальные);
М – модернизированный;
100 – высота оси вращения ротора;
L (S, M) – условная длина станины;
A (B) – длина сердечника статора (отсутствие знака означает одну длину в установочном размере);
2 (4, 6, 8) – число полюсов;
У3 – климатическое исполнение и категория размещения (для работы в зонах с умеренным климатом, в закрытых неотапливаемых помещениях).
Обозначение документа на поставку:
Электродвигателей АИР: ТУ РБ-05755950-420-93;
Электродвигателей 4АМ: 4АМ71У3 - 4АМ100У3 – ТУ 16-510.776-81;
4АМ112У3 - 4АМ132У3 – ТУ 16-510.781-81;
4АМ160У3 - 4АМ180У3 – ТУ 16-510.810-81.
Приложение 2
Таблица 1
Таблица 2
Таблица 4
Таблица 5
Таблица 6
Бабкин Александр Иванович
Морозов Алексей Сергеевич
А.И. Бабкин, А.С. Морозов
КИНЕМАТИЧЕСКИЕ РАСЧЕТЫ
ОБЩЕПРОМЫШЛЕННОГО ПРИВОДА
Учебно-методическое пособие для курсового проектирования
Северодвинск
2011
УДК 621.81
Бабкин А.И., Морозов А.С. Кинематические расчеты общепромышленного привода. Учебно-методическое пособие для курсового проектирования. – Северодвинск, РИО Севмашвтуза, 2011. – 33 с.
Ответственный редактор: к.т.н., доцент А.В. Руденко.
Рецензенты: к.т.н., доцент Д.В. Кузьмин;
Генеральный директор ЗАО НТЦ «Базис» В.А. Базанов.
Учебно-методическое пособие «Кинематические расчеты общепромышленного привода» предназначено для студентов технических специальностей, выполняющих курсовой проект «Проектирование общепромышленного привода» при изучении дисциплины «Детали машин и основы конструирования».
Учебно-методическое пособие содержит теоретический и практический материал, необходимый для определения кинематических и силовых параметров проектируемого привода.
Печатается по решению редакционно-издательского совета Севмашвтуза.
ISBN 5-7723- Ó Севмашвтуз, 2011 г.
Оглавление
Введение.......................................................................................................... 3
1 Предварительные расчеты и анализ работы привода............................... 4
1.1 Исходные данные................................................................................. 4
1.2 Анализ работы привода...................................................................... 4
1.3 Срок службы привода......................................................................... 5
2 Кинематические и силовые расчеты привода............................................. 6
2.1 Выбор электродвигателя..................................................................... 6
2.2 Разбивка передаточного числа привода............................................. 9
2.3 Расчет кинематических и силовых параметров привода................... 13
3 Пример выполнения расчетов..................................................................... 15
Приложение 1 Общие сведения об асинхронных электродвигателях
общепромышленного применения............................................................ 21
Приложение 2 Характеристики асинхронных трехфазных электродвигателей
с короткозамкнутым ротором общепромышленного применения......... 25
Список литературы......................................................................................... 33
Введение
Данное пособие является первым в серии учебно-методических пособий, предназначенных для помощи студентам при курсовом проектировании по теме «Проектирование общепромышленного привода».
В данных пособиях будут рассматриваться вопросы проектирования приводных устройств конвейеров, грузовых тележек, лебедок, подъемников, питателей, смесителей и других средств механизации, широко применяемых в различных отраслях промышленности и использующие большинство деталей и узлов общемашиностроительного применения.
Пособие «Кинематические расчеты» затрагивает вопросы проектирования на предварительном этапе. В нем описан выбор электродвигателя, даны рекомендации по разбивке передаточного числа привода по ступеням, приведен пример расчета параметров привода. В приложении приведены характеристики асинхронных трехфазных электродвигателей, рекомендованных для применения в приводных устройствах.
1 Предварительные расчеты и анализ работы привода
Основные требования, предъявляемые к создаваемому приводу: требуемая производительность, надежность, технологичность, ремонтопригодность, минимальные габариты и масса, безопасность, удобство эксплуатации, экономичность, техническая эстетика. Этими требованиями следует руководствоваться при принятии конструктивных решений на всех этапах проектирования.
Исходные данные
Исходными данными при проектировании привода являются:
· кинематическая схема привода, его примерная компоновка;
· срок службы L;
· условия эксплуатации привода.
Дополнительно для приводов ленточных транспортеров:
· скорость движения конвейера v;
· тяговое усилие F;
· диаметр барабана D.
Для приводов цепных транспортеров:
· скорость движения конвейера v;
· тяговое усилие F;
· число зубьев тяговой звездочки z;
· шаг тяговой цепи t.
Для приводов поворотных платформ:
· Вращающий момент T;
· Скорость вращения платформы n вых;
· Диаметр платформы D.
Анализ работы привода
Выполнение работы следует начинать с изучения схемы привода.
По выданному заданию необходимо проанализировать назначение привода и условия его работы, изучить конструкцию его элементов по атласам или другой подобной литературе. В задании дано место использования привода и определены условия его эксплуатации – количество рабочих смен, интенсивность использования, характер рабочей нагрузки, реверсивность и т.д.
Приводные устройства включают электродвигатель, одно-, двух- или трехступенчатые редукторы, открытые передачи (ременные, цепные) и муфты. Проектируемый привод будет массового или единичного производства малой или средней мощности, имеющий постоянную или мало меняющуюся нагрузку.
Двигатель и редуктор являются основными элементами проектируемого привода. Заданием предусмотрено проектирование цилиндрических, коническо-цилиндрических или червячных редукторов.
Для проектируемых приводов рекомендуется использовать асинхронные трехфазные двигатели. Эти двигатели наиболее универсальны. Они имеют закрытое и обдуваемое исполнение, что позволяет применять их для работы в загрязненных условиях, на открытых площадках и т.п. Двигатели используются для приводов механизмов, имеющих постоянную или маломеняющуюся нагрузку при длительном режиме работы, имеют повышенные пусковые моменты. Они могут работать в любом направлении, обеспечивая при необходимости реверсивность привода.
Срок службы привода
Срок службы (ресурс) , ч, определяется по формуле:
,
где – срок службы привода, лет;
– количество рабочих дней в году ( = 250 или 365 дней при пятидневной или семидневной рабочей неделе соответственно, в зависимости от характера производства);
– коэффициент годового использования (если не указан в задании, то = 1);
– количество смен ( = 1, 2 или 3 смены);
– продолжительность смены ( = 8 часов);
– коэффициент загрузки за смену.
Так как в задании не сказано о характере изменения тягового усилия F за время эксплуатации, считаем как самый неблагоприятный вариант, что режим нагрузки – постоянный, т.е. за все время работы привода рабочая нагрузка не меняется, и равна тяговому усилию F.
2 Кинематические и силовые расчеты привода
Выбор электродвигателя
2.1.1 Требуемая мощность привода:
для транспортеров:
,
для поворотных платформ:
,
где – требуемая мощность привода, кВт;
F – тяговое усилие на конвейере, кН;
v – скорость движения конвейера, м/с;
T – вращающий момент, кН×м;
w – угловая скорость вращения платформы, сек –1;
– скорость вращения платформы, об/мин.
2.1.2 Требуемая мощность электродвигателя:
,
где – требуемая мощность электродвигателя, кВт;
– КПД привода;
– КПД отдельных звеньев кинематической цепи, примерные значения которых приведены в таблице 1.1.
Таблица 1.1
Значения КПД элементов привода
| Тип элемента привода |
|
| Зубчатая передача (закрытая): цилиндрическая коническая | 0,97…0,99 0,96…0,98 |
| Зубчатая передача (открытая): цилиндрическая коническая | 0,93…0,95 0,92…0,94 |
| Червячная передача (закрытая): |
|
| Ременная передача: с плоским ремнем с клиновыми (поликлиновым) ремнями | 0,96…0,98 0,95…0,97 |
| Цепная передача: открытая закрытая | 0,92…0,95 0,94…0,96 |
| Муфта соединительная | 0,98 |
| Подшипники качения (одна пара) | 0,99 |
Примечание: КПД червячных передач сильно зависит от передаточного числа, которое на данном этапе проектирования неизвестно, поэтому предварительно рекомендуется принять . После окончательного определения передаточного числа следует уточнить КПД червячного редуктора и всего привода.
2.1.3 Подбор электродвигателей
Двигатель подбирается по передаваемой мощности. Условие выбора:
,
где – мощность двигателя по каталогу.
Для асинхронных двигателей допускается перегрузка 8% – при постоянной нагрузке, и 12% – при переменной нагрузке.
В большинстве случаев можно подобрать несколько электродвигателей требуемой мощности, с разными скоростями вращения. Данные о выбранных электродвигателях необходимо свести в таблицу 1.2.
Если мощность двигателя по каталогу больше требуемой мощности , то расчетная мощность двигателя . Если двигатель работает с перегрузкой ( ), то .
Таблица 1.2
Параметры выбранных электродвигателей
| Обозначение электродвигателя | Мощность P , кВт | nэд. ном., об/мин | uпривода | |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 |
2.1.4 Передаточное число привода
Передаточное число привода для каждого варианта электродвигателя:
,
где – частота вращения приводного вала рабочей машины:
для ленточных транспортеров, грузоподъемных и прочих машин:
,
для цепных транспортеров:
,
где – линейная скорость тягового органа, м/сек;
D – диаметр барабана, мм;
t – шаг тяговой цепи для цепных транспортеров, мм;
z – число зубьев тяговой звездочки.
Для поворотных платформ указано в задании.
2.1.5 Определение диапазона передаточных чисел привода
Передаточное число привода равняется произведению передаточных чисел составляющих его ступеней:
.
Количество ступеней в приводе и виды передач определены в задании. Если в кинематической схеме передачи какого-либо одного вида встречается более одного раза (например, в двухступенчатом зубчатом редукторе), то обычно их различают как быстроходная и тихоходная ступени.
Рекомендованные и предельные значения передаточных чисел различных передач приведены в таблице 1.3.
Таблица 1.3
Рекомендуемые и предельные значения передаточных чисел
механических передач
| Вид передачи | Твердость зубьев | Передаточное число | |
|
|
| ||
| Закрытая цилиндрическая зубчатая: | |||
| тихоходная ступень во всех редукторах ( | £ 350 HB | 2,5…5,6 | до 6,3 |
| 40…56 HRC | 2,5…5,6 | до 6,3 | |
| 56…63 HRC | 2…4 | до 5,6 | |
| быстроходная ступень в редукторах по развернутой схеме ( | £ 350 HB | 3,15…5,6 | до 8 |
| 40…56 HRC | 3,15…5,6 | до 7,1 | |
| 56…63 HRC | 2,5…4 | до 6,3 | |
| быстроходная ступень в соосном редукторе ( | £ 350 HB | 4…6,3 | до 8 |
| 40…56 HRC | 4…6,3 | до 7,1 | |
| 56…63 HRC | 3,15…5 | до 6,3 | |
| Открытая цилиндрическая зубчатая | £ 350 HB | 3…7 | до 16 |
| Коробка передач | любая | 1…2,5 | до 3,1 |
| Закрытая коническая зубчатая | £ 350 HB | 1…4 | до 6,3 |
| ³ 40 HRC | 1…4 | до 5 | |
| Открытая коническая зубчатая | £ 350 HB | 2…4 | до 8 |
| Червячная | – | 16…50 | 8…80 |
| Ременная с клиновыми и поликлиновыми ремнями | – | 2…4 | 1,5…8 |
| Цепная | – | 1,5…5 | до 10 |
По табличным данным можно определить диапазон, в котором будет находится передаточное число привода.
, .
В исключительных случаях в качестве минимальной или максимальной величины можно принимать предельные значения передаточного числа.
Передаточное число привода должно находится внутри этого диапазона:
Варианты приводов, передаточное число которых не попадает в указанный диапазон можно исключить из рассмотрения. Из оставшихся вариантов необходимо выбрать один, обеспечивающий минимальные габариты и массу (следовательно, и стоимость) привода.
Обычно из оставшихся вариантов выбирают электродвигатель с меньшей частотой вращения, так как этот вариант имеет меньшее передаточное число привода, и, следовательно, меньшую массу и габариты. Кроме того, следует помнить, что чем меньше скорости вращения в приводе, тем меньше износ, шум, вибрация. Поэтому при всех одинаковых параметрах следует отдавать предпочтение вариантам с электродвигателями с меньшими скоростями вращения, хотя они больше по габаритам, массе и стоимости. Но проигрыш в массе электродвигателя, как правило, гораздо меньше, чем выигрыш в массе механических передач всего привода.
Разбивка передаточного числа привода
2.2.1 Разбивка передаточного числа привода по ступеням
При разбивке передаточного числа привода на передаточные числа отдельных передач следует помнить, что чем больше передаточное число передачи, тем больше ее габариты. Закрытые передачи (зубчатые и червячные) более компактные, чем открытые (ременные и цепные), и увеличение передаточного числа закрытых передач меньше скажется на увеличении габаритов и массы всего привода.
Поэтому, если привод состоит из редуктора и открытых передач, то для обеспечения минимальных габаритов и массы привода передаточные числа открытых передач следует принимать как можно ближе к минимальному рекомендованному передаточному числу.
Обычно, если привод состоит из редуктора и открытой передачи, то последовательность расчета следующая:
 ,
,
где  – предварительное значение передаточного числа открытой передачи,
– предварительное значение передаточного числа открытой передачи,
 – минимальное рекомендованное значение передаточного числа открытой передачи (по табл. 1.3).
– минимальное рекомендованное значение передаточного числа открытой передачи (по табл. 1.3).
 ,
,
где  – предварительное значение передаточного числа редуктора.
– предварительное значение передаточного числа редуктора.
Если полученное £  (см. табл. 1.3, 1.4 или 1.5), то по ГОСТ 2185-66 для одноступенчатых цилиндрических и конических закрытых зубчатых передач (редукторов) передаточные числа
(см. табл. 1.3, 1.4 или 1.5), то по ГОСТ 2185-66 для одноступенчатых цилиндрических и конических закрытых зубчатых передач (редукторов) передаточные числа  рекомендуется принимать:
рекомендуется принимать:
1-й ряд – 2,0 2,5 3,15 4,0 5,0 6,3
2-й ряд – 2,24 2,8 3,55 4,5 5,6 7,1
По ГОСТ 2144-76 для одноступенчатых закрытых червячных передач (редукторов) с червяком с числом витков  = 1; 2; 4 передаточные числа
= 1; 2; 4 передаточные числа  рекомендуется принимать:
рекомендуется принимать:
1-й ряд – 10 12,5 16 20 25 31,5 40 50 63 80
2-й ряд – 11,2 14 18 22,4 28 35,5 45 56 71
Значения 1-го ряда следует предпочитать значениям 2-го ряда.
После принятия стандартного значения , уточняем значение передаточного числа открытой передачи:
 .
.
Для двух- и трехступенчатых редукторов передаточное число можно не округлять:
=  .
.
Если полученное >  , передаточное число редуктора принимается максимальным (по рекомендациям табл. 1.3, 1.4 или 1.5), и уточняется значение передаточного числа открытой передачи:
, передаточное число редуктора принимается максимальным (по рекомендациям табл. 1.3, 1.4 или 1.5), и уточняется значение передаточного числа открытой передачи:
= ,  .
.
Если в привод входит червячный редуктор, то после уточнения передаточного числа следует уточнить КПД редуктора  (табл. 1.1), КПД привода
(табл. 1.1), КПД привода  и требуемую мощность электродвигателя
и требуемую мощность электродвигателя  (п. 2.1.2).
(п. 2.1.2).
2.2.2 Разбивка передаточного числа редуктора
Для двух- и трехступенчатых редукторов рекомендуемое (в числителе) и предельное (в знаменателе) значения передаточных чисел редуктора и рекомендуемое соотношение передаточных чисел ступеней приведено в таблице 1.4 и 1.5 соответственно.
Таблица 1.4
Передаточные числа в двухступенчатых редукторах.
| Редуктор | Схема | Передаточное число | ||
| *
| 
| 
| ||
| Двухступенчатый по развернутой схеме | 
| 
| 
| 
|
| Двухступенчатый соосный | 
| 
| 
| 
|
| Двухступенчатый соосный с внутренним зацеплением | 
| 
| 
| 
|
| Коническо-цилиндрический | 
| 
| 
| 
|
| Цилиндрическо-червячный | 
| 
| 1,6…3,15 | 
|
| Червячно-цилиндрический | 
| 
|
| 4…6,3 |
| Планетарный двухступенчатый: |
| |||

| 4 | 
| ||
| 
| 6,3 | ||

| 10 | 
| ||
| Примечания: 1) * В числителе приведены рекомендованные значения 2) Б – быстроходная ступень, Т – тихоходная ступень. | ||||
 , в знаменателе – предельные значения
, в знаменателе – предельные значения
Таблица 1.5.
Передаточные числа в трехступенчатых редукторах.
| Редуктор | Схема | Передаточное число | ||||
 * *
| 
| 
|
| |||
| Трехступенчатый цилиндрический | 
| 
| 
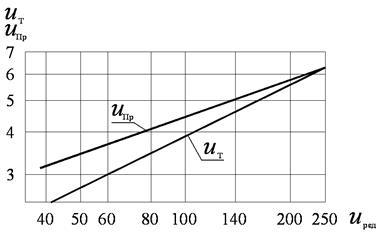
| по графику рис. 1.1 | по графику рис. 1.1 | |
| Трехступенчатый коническо-цилиндрический | 
| 
| 
| 
| 
| |
| Примечание: 1) * В числителе приведены рекомендованные значения 2) Б – быстроходная ступень, Пр – промежуточная ступень, Т – тихоходная ступень. | ||||||
|
| ||||||
| Рис. 1.1. График для определения uТ и uПр в трехступенчатых редукторах | ||||||
Для коробок передач (рис. 1.2) передаточное число каждой последующей пары зубчатых колес получают умножением предыдущего на знаменатель геометрической прогрессии  :
:
 .
.
Стандартные значения следующие: 1,12; 1,25; 1,40; 1,60; 1,80; 2,00.
Наименьшее передаточное число коробки передач может быть равно единице.
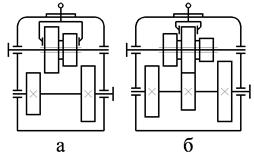
|
| Рис. 1.2. Схемы коробок передач с двойным (а) и тройным (б) блоками |
Дата: 2019-07-30, просмотров: 169.