Функциональная схема типовой универсальной системы ЧПУ состоит из двух основных устройств: устройства числового программного управления, конструктивно оформленного в виде отдельного шкафа или пульта и исполнительных устройств с приводами и датчиками обратной связи, размещенными на станке. Основные блоки системы ЧПУ описаны ниже.
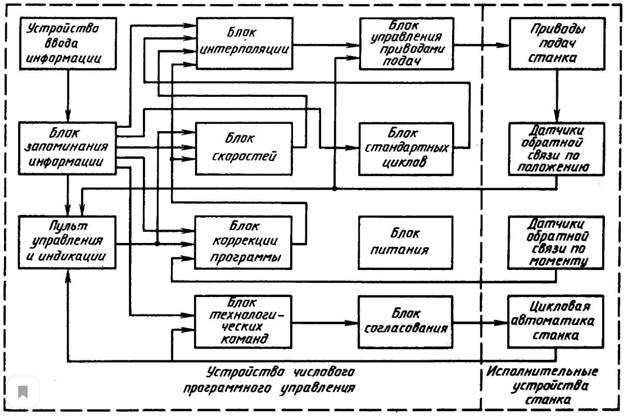
Устройство ввода информации вводит числовую информацию с программоносителя.
Блок запоминания считанной информации. Помимо запоминания входной информации в этом блоке выполняются ее контроль и формирование соответствующего сигнала в момент обнаружения ошибки. Этот блок, как правило, имеет возможность получать информацию от ЭВМ верхнего уровня, что необходимо при объединении станков в ГПС.
Пульт управления и индикации служит для связи человека-оператора с системой ЧПУ. С помощью этого пульта проводится пуск системы и ее останов, переключение режимов работы с автоматического на ручной и т.д., а также коррекция скорости подачи и размеров инструментов и изменение начального положения инструмента по всем или некоторым координатам. На этом пульте находится световая сигнализация и цифровая индикация о состоянии системы.
В современных ЧПУ индикация обычно осуществляется с помощью встроенного дисплея, позволяющего выводить значительно большее число параметров, а также проводить отработку программ непосредственно на станке.
Блок интерполяции формирует частичную траекторию движения инструмента между двумя или более заданными в программе точками. В большинстве случаев используют линейную и круговую интерполяцию, хотя иногда применяют винтовую или цилиндрическую интерполяцию.
Приводы подач, чаще всего следящие, служат для обеспечения перемещения управляемых элементов станка (столов, суппортов, кареток и т.п.) с необходимой скоростью и точностью при заданном моменте. Под следящим приводом будем понимать систему, состоящую из двигателя (электрического, гидравлического), усилителя мощности, снабжающего этот двигатель необходимой энергией, которая регулируется в широких пределах, датчика обратной связи по положению, служащего для измерения фактического перемещения (или положения) управляемого объекта, и сравнивающего устройства, сравнивающего фактическое положение объекта с заданным и выдающего сигнал ошибки, поступающий на вход усилителя мощности, в результате чего угловая скорость вала двигателя оказывается пропорциональной ошибке системы. В процессе работы эта система перемещает управляемый объект таким образом, чтобы поддерживать минимальное значение ошибки. Если ошибка по каким-либо причинам превышает заранее установленный допустимый предел, то система ЧПУ автоматически отключается с помощью специальных устройств защиты.
Блоки управления приводами подач служат для преобразования информации, получаемой с выхода интерполятора, в форму, пригодную для управления приводами подач, так, чтобы при поступлении каждого импульса управляемый объект перемещался на определенное расстояние, называемое ценой импульса, которая обычно составляет 0,01 или 0,001 мм. В зависимости от типа приводов (замкнутые или разомкнутые, фазовые или амплитудные), применяемых на станках, блоки управления существенно различаются.
В разомкнутых приводах, использующих шаговые двигатели, блоки управления представляют собой специальные кольцевые коммутаторы, на выходе которых включены мощные усилители, питающие обмотки шаговых двигателей, которые служат для циклического переключения обмоток ШД, что заставляет вращаться его ротор. В замкнутых приводах фазового типа, использующих датчики обратной связи в виде вращающихся трансформаторов (ВТ) или индуктосинов в режиме фазовращателей, блоки управления представляют собой преобразователи импульсов в фазу переменного тока и фазовые дискриминаторы, которые сравнивают фазу сигнала на выходе фазового преобразователя с фазой датчика обратной связи и выдают разностный сигнал ошибки на усилитель мощности привода.
В этом же блоке обычно расположены усилители для питания датчиков обратной связи, а также устройства защиты, отключающие приводы при превышении допустимой ошибки слежения.
Датчики обратной связи ДОС являются измерительными устройствами, служащими для определения фактического положения (абсолютного значения координаты) или перемещения (относительного значения координаты) управляемого объекта в пределах шага системы. При этом суммирование шагов производит система ЧПУ. Перемещения объекта определяют как непосредственно с помощью каких-либо линейных измерительных устройств, например, индуктосинов, так и косвенно, измеряя, например, угол поворота вала двигателя подач с помощью какого-либо углового измерительного устройства, например, обычного ВТ или резольвера (точный ВТ синусно-косинусного типа, применяемый в счетно-решающих устройствах).
Помимо индуктосинов, для непосредственного измерения линейных перемещений иногда используют и другие измерительные устройства, например, прецизионные зубчатые рейки с многополюсными ВТ, или для достижения особо высокой точности – оптические штриховые измерительные шкалы с соответствующими импульсными датчиками. Обычно одно и то же устройство ЧПУ может работать с различными типами ДОС.
Блок скоростей подач обеспечивает заданную скорость подачи, а также разгон и торможение в начале и конце участков обработки по заданному закону, чаще всего – линейному. Скорость подачи задается либо номером скорости соответствующего ряда скоростей, составляющих геометрическую прогрессию со знаменателем порядка 1,25, либо непосредственно в миллиметрах в минуту через 1 или даже через 0,1 мм/мин. Помимо рабочих скоростей подач, составляющих обычно 5–2000 мм/мин, этот блок выполняет, как правило, и установочное движение с повышенной скоростью, на которой производится установка координат при позиционной обработке или переход инструмента из одного участка заготовки в другой при контурной обработке. Эта скорость в современных системах ЧПУ составляет 10–15 м/мин.
Блок коррекции программы вместе с пультом управления служит для изменения запрограммированных параметров обработки, т.е. скорости подачи и размеров инструмента (длины и диаметра). Изменение скорости движения (обычно 5–120 %) сводится к ручному изменению частоты задающего генератора в блоке подач. Изменение длины инструмента (обычно от 0 до 100 мм) сводится к изменению заданного значения перемещения вдоль оси инструмента, без изменения его начального положения.
Блок технологических команд предназначен для управления цикловой автоматикой станка, включающего поиск и смену достаточно большого числа инструментов (до 100), смену частоты вращения шпинделя, зажим направляющих при позиционировании и разжим их при движении, различные блокировки, обеспечивающие сохранность станка. Цикловая автоматика станка состоит в основном из исполнительных элементов типа пускателей, электромагнитных муфт, соленоидов и других электромагнитных механизмов, а также дискретных элементов обратной связи типа концевых и путевых выключателей, реле тока, реле давления и других элементов, контактных или бесконтактных, сигнализирующих о состоянии исполнительных органов. Часто эти элементы с дополнительными устройствами типа реле реализуют местные циклы (например, цикл поиска и смены инструмента), команды, на исполнение которых подаются из устройства программного управления. Современные устройства ЧПУ, как правило, осуществляют эти циклы внутри, выдавая сигналы на исполнительные элементы станка через согласующе-усилительные устройства, которые могут находиться как в станке, так и в устройстве ЧПУ. Для этого часто используют программируемые контроллеры в виде отдельного блока, размещаемого внутри или вне устройства ЧПУ.
Блок стандартных циклов служит для облегчения программирования и сокращения длины программы при позиционной обработке повторяющихся элементов заготовки, например, при сверлении и растачивании отверстий, нарезании резьбы и других операций.
Помимо этих блоков, применяют блоки адаптации, которые служат для увеличения точности и производительности обработки при изменяющихся по случайному закону внешних условиях (например, припуск на обработку, твердость обрабатываемого материала, затупление инструмента). Это объясняется тем, что любая система ЧПУ является разомкнутой системой управления, так как она не «знает» результата своей работы. В системе ЧПУ с обычной обратной связью заготовка ею не охвачена; задается только перемещение инструмента относительно заготовки. В то же время на точности размеров детали сказывается, например, деформация инструмента, которая в обычных системах ЧПУ может учитываться при программировании только тогда, когда она постоянна или изменяется по заранее известному закону, чего на практике нет.
Классификации систем ЧПУ.
Системы ЧПУ классифицируют:
1. по уровню технологических возможностей (NC; SNC; CNC; DNC; HNC)
2. по технологическому назначению
3. по числу потоков информации
4. по принципу задания УП:
a) декодированный
b) кодированный
c) ЭВМ
5. по типу привода:
a) ступенчатый
b) регулируемый
c) дискретный
d) следящий
6. по числу одновременно управляемых координат.
1. NC – это системы с покадровым чтением перфоленты на протяжении цикла обработки каждой заготовки.
SNC – это системы с однократным чтением перфоленты, перед обработкой всей партии заготовок.
CNC – это системы со встроенной ЭВМ компьютером или микропроцессором.
DNC – это системы прямого числового управления группой станков от одной ЭВМ.
HNC – это оперативные системы с ручным набором программы на пульте управления.
2. Технологическое назначение:
a) Позиционные системы, обеспечивают высокоточное перемещение в заданную программой позицию за min время. По каждой координатной оси программируется только необходимое перемещение, а траектория этого перемещения может быть произвольной. Большая часть перемещения из одной позиции в другую выполняется с max скоростью, а подвод к нужной позиции с min («ползучей» скоростью). Для повышения точности позиционирования, выход в требуемую позицию всегда выполняется в одном направлении (например: слева на право), это сверление и координатно-расточные станки.
b) Системы с прямоугольным формообразованием позволяют управлять перемещением исполнительного органа, непосредственно в процессе обработки, в ходе формообразования исполнительный орган перемещается по осям поочередно, поэтому траектория его перемещения имеет ступенчатый вид. При грубом позиционировании исполнительного органа, его подвод к заданной позиции может выполняться с разных сторон, при точном – только с одной стороны. Число управляемых координат в таких системах может достигать 5 и одновременно управляемых 4-х – это токарные, фрезерные, расточные станки.
c) Системы с прямолинейным формообразованием и позиционированием, реализует движение инструмента при резании одновременно по двум координатам, в таких системах используется двух координатный интерполятор, который одновременно подает управляющий импульс на два привода подач. Такие системы, в сравнении с прямоугольным, обладают расширенными технологическими возможностями и так же используются в токарных, фрезерных, расточных станках.
d) Системы с криволинейным формообразованием, позволяет управлять обработкой сложных плоских и объемных деталей с участками сложных криволинейных контуров.
Системы b, c, d – это контурные системы. Многоцелевые станки сверлильно-фрезерно-расточного типа, для расширения их технологических возможностей оснащают комбинированными позиционно контурными системами ЧПУ.
3. Число потоков информации:
a) В разомкнутых системах имеется один поток информации отсчитывающего устройства к исполнительному органу. В таких системах обычно используют шаговые двигатели, поскольку их крутящий момент не достаточен для обеспечения движения привода подачи, такие двигатели используют в качестве задающего устройства, сигналы которого требуют усиления. Часто в качестве усилителя используется гидроусилитель момента в виде аксиально-поршневого двигателя, вал которого соединен с ходовым винтом привода подач. В разомкнутых системах нет датчиков обратной связи  в них отсутствует информация о действительном положении исполнительного органа.
в них отсутствует информация о действительном положении исполнительного органа.
b) В замкнутых, два потока информации:
· Отсчитывающий к …………………
· От датчика обратной связи по перемещению
В этих системах рассогласование между заданным и действительным перемещениями исполнительного органа, устраняется благодаря обратной связи.
c) Адаптивные (три потока информации):
· Отсчитывающее устройство исполнительному органу
· От датчика обратной связи по перемещению
· От датчиков, установленных на образце и контролирующих процесс по параметрам: износ инструмента, изменение сил резания, изменение упругих перемещений.
Эти системы позволяют корректировать программу обработки, с учетом реальных условий резания.
По числу программируемых движений, станки с ЧПУ бывают:
1. двух координатными: сверлильные и токарные;
2. трех координатными: сверлильные, фрезерные, расточные;
3. четырех координатными: двух суппортные токарные станки, фрезерные станки с дополнительным движением заготовки;
4. пяти координатными: фрезерные;
5. многокоординатными: специализированные станки.
Позиционные системы ЧПУ.
Позиционные системы ЧПУ представляют собой наиболее простой вид управляющей системы. По каждой координатной оси программируется только величина перемещения исполнительного органа до заданной позиции, а траектория перемещения может быть произвольной. Перемещение из позиции в позицию совершается на максимальной скорости. Перемещение в процессе обработки после достижения заданной позиции допускается исключительно по прямой линии и с рабочей подачей. Позиционные системы ЧПУ используются, когда обработка происходит только в определенных позициях на плоскости, например, в сверлильных и координатно-расточных станках. В позиционных системах ЧПУ каждый кадр программы обычно соответствует обработке одного отверстия или одному проходу инструмента. Позиционные системы обеспечивают высокоточное перемещение ИО станка в заданную программой позицию за минимальное время. По каждой координатной оси программируется только величина перемещения, а траектория перемещения может быть произвольной.
Контурные системы ЧПУ.
Контурные системы ЧПУ обеспечивают автоматическое перемещение рабочего органа по произвольной траектории с контурной скоростью, заданной программой управления станком. Контурная скорость — результирующая скорость подачи рабочего органа станка, направление которой совпадает с направлением касательной в каждой точке заданного контура обработки. Траектория обработки обеспечивается совместным и взаимосвязанным движением нескольких исполнительных устройств. Область применения контурных систем — токарные и фрезерные станки с ЧПУ. Контурные СЧПУ с управлением от перфоленты подразделяют по типу интерполяции (линейной, круговой и специальной), типу привода (следящий и шаговый), числу одновременно управляемых координат (двум, трем и т. д.).
Дата: 2019-07-25, просмотров: 361.