Индукционные системы синхронной передачи названы так потому, что в качестве датчиков и приемников они используют индукционные микромашины переменного тока - сельсины.
Сельсины имеют однофазную обмотку возбуждения, питаемую однофазным пере
менным током, и вторичную синхронизирующую трехфазную обмотку.
В зависимости от расположения этих обмоток различают сельсины контактные и бесконтактные.
Контактные сельсины в свою очередь могут быть двух видов:
1. с однофазной обмоткой на статоре и трехфазной обмоткой на роторе;
2. с однофазной обмоткой на роторе и трехфазной обмоткой на статоре.
У бесконтактных сельсинов обе обмотки расположены на статоре.
У контактных сельсинов первого вида на статоре имеются два явно выраженных по
люса ( как у машин постоянного тока ), на которых размещена обмотка возбуждения. Эта
обмотка получает питание от сети переменного тока напряжением 36, 45, 110, 115 и 127 В частотой 50, 400 и 500 Гц ( в зависимости от типа сельсина )
Ротор выполнен с неявно выраженными полюсами. В пазы ротора укладывается трехфазная обмотка, соединяемая обычно по схеме «звезда». На роторе расположены три контактных кольца со щетками на них, предназначенные для электрической связи с други-
ми сельсинами.
Контактные сельсины второго вида имеют обращенную конструкцию, т.е. в пазах сердечника статора уложена трехфазная обмотка, а на роторе с явно выраженными полю
сами расположена однофазная обмотка.
Эти сельсины имеют ряд технических и эксплуатационных преимуществ по сравне
нию с сельсинами первого вида, а именно:
1. меньшее число контактных колец ( два вместо трех );
2. синхронизирующий момент в 1,5 раза больше, чем у сельсинов первого вида.
У бесконтактных сельсинов отсутствуют контактные кольца и щетки, так как у них и однофазная первичная, и трехфазная вторичная обмотки расположены на неподвижном статоре, а ротор представляет собой специальную конструкцию в виде двух постоянных
магнитв, разделенных немагнитным материалом.
На рис. 16.5 показаны магнитные системы различных сельсинов.
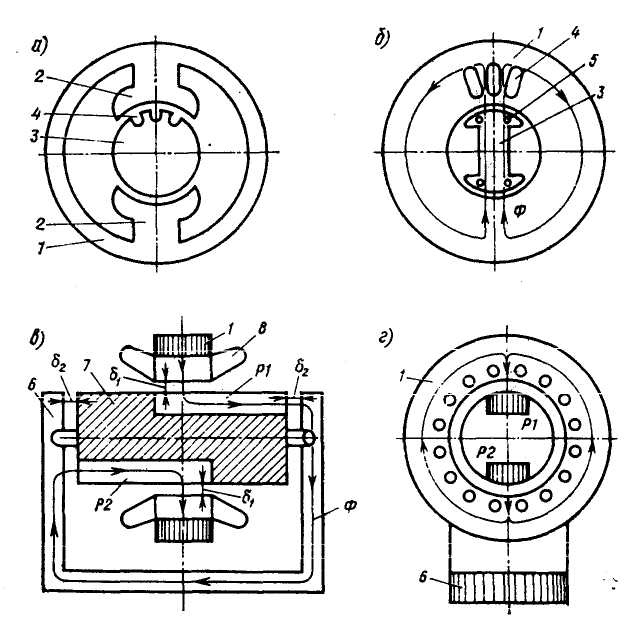
Рис. 16.5. Магнитные системы контактных сельсинов с первичной однофазной обмоткой на статоре (а), на роторе (б) и бесконтактных сельсинов (в), (г):
1- статор; 2 - полюсы; 3 - ротор; 4 - пазы; 5 - пазы в роторе для короткозамкнутой обмотки; 6 — внешний неподвижный магнитопровод; 7 - немагнитный ротор; 8 - вторич-
ная трехфазовая распределительная обмотка: P1, P2 - постоянные магниты; δ  , δ
, δ  - воз-
- воз-
душные зазоры; Ф — поток возбуждения
2.3. Принцип действия сисемы синхронной связи
Принцип действия индукционной синхронной передачи рассмотрим на простей
шем примере, когда к датчику подключен один приемник (рис. 16.6 ).
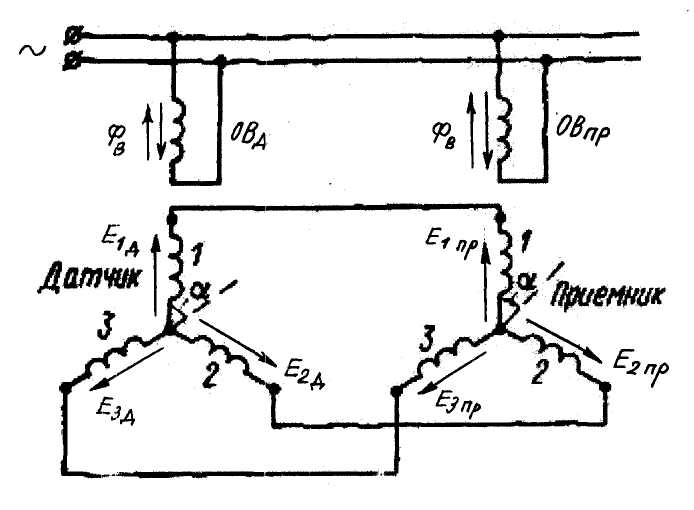
Рис. 16.6. Схема индукционной системы синхронной связи
Обмотки возбуждения сельсинов - датчика ОВ  и приемника ОВ
и приемника ОВ  - подключены к общему источнику однофазного переменного тока постоянной частоты. Протекающий по этим обмоткам переменный ток возбуждения вызывает одинаковые во времени ( синфаз-
- подключены к общему источнику однофазного переменного тока постоянной частоты. Протекающий по этим обмоткам переменный ток возбуждения вызывает одинаковые во времени ( синфаз-
ные ) изменения магнитных потоков Ф  возбуждения обоих сельсинов.
возбуждения обоих сельсинов.
В исходном ( согласованном ) положении роторов трехфазные обмотки сельсинов имеют одинаковое пространственное положение относительно обмоток возбуждения. По-
этому в одноименных фазах трехфазных обмоток сельсинов будут индуктироваться одина
ковые по величине и совпадающие по фазе э. д. с.
Е  = Е
= Е  сosα; Е = Е
сosα; Е = Е  сos ( α - 120º ); Е
сos ( α - 120º ); Е  = Е сos ( α - 240º ),
= Е сos ( α - 240º ),
где α – угол поворота ротора от исходного положения, в котором ось обмотки воз-
буждения статора и ось первой фазной обмотки ротора совпадали.
В соединительных проводах, связывающих между собой попарно одноименные фаз
ые обмотки, э.д.с. этих обмоток находятся в противофазе ( направлены встречно ). Напри-
мер, в нижнем проводе направлены встречно фазные э.д.с. датчика Е  и приемника Е
и приемника Е  , которые компенсируют друг друга, поэтому ток в нижнем проводе не протекает. По той же причине не протекают токи в остальных двух проводах.
, которые компенсируют друг друга, поэтому ток в нижнем проводе не протекает. По той же причине не протекают токи в остальных двух проводах.
При повороте ротора сельсина – датчика его фазные э.д.с. изменятся, т.е. равнове-
сие между одноименными э.д.с. обоих сельсинов нарушится. В результате в проводах поте
кут т.н. уравнительные токи. При этом взаимодействие токов ротора с магнитными потока
ми статоров вызовет появление электромагнитных моментов.
У сельсина – датчика этот момент направлен против внешней силы, повернувшей ротор, т.е. стремится вернуть ротор в исходное положение. Однако этот ротор не может вернуться в исходное положение, т.к. он повернут, например, баллером руля
В то же время такой момент у сельсина – приемника имеет противоположное на-
правление и поворачивает ротор этого сельсина в ту сторону, в которую был повернут ро-
тор сельсина – датчика. На оси этого ротора закреплена легкая стрелка, которая поворачи-
вается, указывая угол поворота ротора сельсина – датчика ( в нашем примере – угол пово-
рота пера руля ).
Машинные телеграфы
Машинным телеграфом называется устройство, предназначенное для дистанцион-
ной передачи команд из рулевой рубки в машинное отделение об изменении режима работы судовой силовой установки и передачи ответов об исполнении команд.
Конструктивно машинный телеграф состоит из следующих основных приборов:
передатчика-приемника, устанавливаемого в рулевой рубке и на крыльях мостика; прием-
ника-передатчика, расположенного в ЦПУ или МО; аппаратуры сигнализации.
Внешний вид передатчика-приемника показан на рис. 16.7.
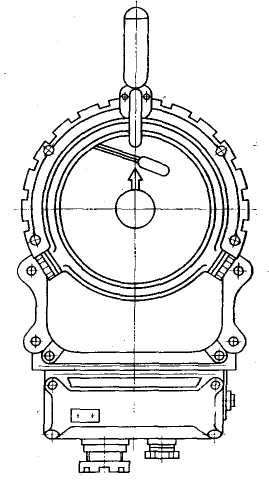
Рис. 16.7. Передатчик-приемник машинного телеграфа ( в рулевой рубке, на крыльях мостика )
Внутри передатчика-приемника расположены датчик команд и приемник отработ-
ки заданной команды с общей шкалой, на которой нанесены команды, соответствующие режимам работы главного двигателя.
На исполнительном посту ( ЦПУ или МО ) устанавливается приемник-передатчик,
совмещающий приемник команд и датчик ответа о принятом приказе. На шкале прибора написаны такие же команды, что и на приборе командного поста.
Приемник-передатчик отличается от передатчика-приемника тем, что в нем отсут-
ствует освещение шкалы ( в машинном отделении светло ) и имеется система, которая автоматически включает звуковые и световые сигналы для привлечения внимания команды и отключает приборы сигнализации после передачи правильного ответа.
Основными элементами судовых телеграфов переменного тока являются индукции
онные приборы синхронной связи - сельсины. В качестве сельсинов-датчиков используют
ся контактные сельсины с однофазной обмоткой на роторе, в качестве приемников - бесконтактные сельсины.
В телеграфах нашли применение двойные ( сдвоенные ) сельсины - один датчик, другой приемник.
На рис. 16.8. показана элементная схема машинного телеграфа.
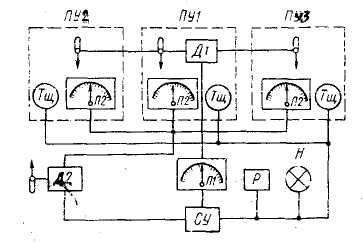
Рис. 16.8. Элементная схема машинного телеграфа
Посты управления ПУ1 - ПУЗ устанавливаются в рулевой рубке и на крыльях ходо
вого мостика. Центральным является пост ПУ1 в рубке, где размещен датчик Д1 (передат-
чик приказаний) синхронной связи, поворот которого можно осуществлять посредством механической передачи с любого из трех постов управления. Датчик Д1 соединен линией связи с приемником синхронной связи П1 (приемник приказаний ), расположенный в ма-
шинном отделении.
При подаче команды поворотом датчика Д1 стрелка приемника П1 устанавливается
в положение, соответствующее той или иной команде.
В этом случае включается сигнальное устройство СУ, в которое входят ревун Р, сигнальная лампа Н и трещотки Тщ. Рукоятка датчика Д2 (передатчик ответа) ставится об
служивающим персоналом в машинном отделении в положение, повторяющее положение стрелки приемника П1, что свидетельствует о приеме команды к исполнению.
Датчик Д2 соединен линией связи с приемниками П2 (приемник ответа) постов уп-
равления ПУ1 - ПУЗ. Поворот датчика Д2 вызывает перемещение стрелок приемников П2 и установку их в положение, соответствующее поданной команде (стрелки совмещаются с рукоятками постов управления ПУ1 - ПУЗ).
При совмещенном положении рукоятки датчика Д2 и стрелки приемника П1 сиг-
нальное устройство СУ выключает звуковую и световую сигнализацию ( ревун Р, лампу Л и трещотки Тщ).
Дата: 2019-02-02, просмотров: 400.