Билет №13
1. Способы реверсирования ДПТ с независимым возбуждением. Схемы
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Для изменения направления вращения ДНВ нужно изменить направление действия момента, чего можно достичь изменением направления IЯили Ф, как следует из выражения:
 .
.
О 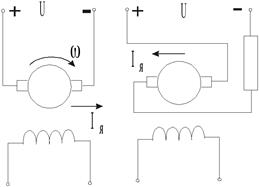 бычно это осуществляется изменением направления IЯ, т.к. изменение направления Ф сильно затянуло бы процесс реверса из-за большой индуктивности обмотки возбуждения. Кроме того, в ней при ее отключении и быстром исчезновении Ф может навестись большая ЭДС самоиндукции, которая может вызвать пробой изоляции.
бычно это осуществляется изменением направления IЯ, т.к. изменение направления Ф сильно затянуло бы процесс реверса из-за большой индуктивности обмотки возбуждения. Кроме того, в ней при ее отключении и быстром исчезновении Ф может навестись большая ЭДС самоиндукции, которая может вызвать пробой изоляции.
Динамическое торможение ДПТ. Схема. Механические характеристики
Для осуществления данного режима якорь двигателя отключают от сети и замыкают на тормозное сопротивление  так как это представление на рис. 3.8.
так как это представление на рис. 3.8.

Рис.3.8. Схема включения ДПТ с НВ при динамическом торможении.
Уравнение механической характеристики для этого режима запишется как
 , (3.12)
, (3.12)
где  - тормозной момент.
- тормозной момент.
Ток якоря можно определить как
 . (3.13)
. (3.13)
т. е. ток (и, следовательно, момент двигателя) изменяет свой знак, чем и обуславливается процесс торможение.
На рис. 3.9 представлены механические характеристики ДПТ с НВ, соответствующие режиму динамического торможения.

Рис. 3.9. Механические характеристики ДПТ с НВ, соответствующие режиму динамического торможения при  <
<  <
<  .
.
Способ динамического торможения весьма экономичен, т. к. двигатель работает генератором на постоянную нагрузку, потребляя из сети энергию только на электромагнитное возбуждение.
При переводе ДПТ из двигательного режима в режим динамического торможения необходимо ограничивать величину максимального тормозного тока в момент переключения.
Билет №14
1. Краткий исторический обзор развития электропривода
Электропривод – наука, изучающая теорию и практику электромеханических систем.
Переход к более совершенным типам привода — индивидуальному и взаимосвязанному, которые полнее учитывают основные условия работы различных производственных механизмов, стал возможен лишь на базе широкой электрификации. Применение электропривода создали новую эпоху в развитии промышленности.
Первый электродвигатель, с помощью которого осуществлен электропривод, был построен в 1834—1838 гг. петербургским академиком Б. С. Якоби, в 1838 г. на Неве были проведены испытания этого двигателя, установленного на небольшом катере.
Открытие явления вращающегося магнитного поля в 80-х годах XIX века (Г. Феррарис и Н. Тесла) положило начало конструированию многофазных электродвигателей. Наиболее экономичной среди многофазных систем оказалась система трехфазного тока, основы которой были разработаны в 1889—1891 г.г. русским инженером М. О. Доливо-Добровольским. Система трехфазного тока явилась тем новым техническим средством, с помощью которого разрешался весь комплекс проблемы производства, передачи, распределения и потребления электроэнергии. Разработкой трехфазной системы были созданы предпосылки для развития электрификации.
Создание М. О. Доливо-Добровольским в 1889 г. трехфазного асинхронного двигателя ознаменовало новый этап в развитии электропривода и открыло широкую дорогу промышленному применению электричества.
Несомненные экономические преимущества централизованного производства электроэнергии и простота ее распределения привели к тому, что электродвигатель, постепенно вытесняя другие виды двигателей, занял первое место во всех отраслях промышленности.
Так, в черной металлургии уже в первой пятилетке было введено в строй 19 мощных прокатных станов, а во второй 60. В 1931—1932 гг. разрабатывается отечественная система комплексной автоматизации электроприводов загрузки доменных печей, создается электрооборудование для врубовых машин угольной промышленности, взаимосвязанный электропривод бумагоделательных машин и т. п.
В 1936—1937 гг. были разработаны на принципе следящего привода схемы автоматического управления нажимными винтами прокатных станов.
Последующие годы (1940—1945 гг.) ознаменованы разработкой новых принципов построения систем автоматического управления электроприводами, основанных на применении замкнутых систем с обратными связями и использовании электромашинных, электронных и в дальнейшем магнитных усилителей.
Первая установка такого рода, в которой двигатель постоянного тока для привода шахтного подъемника питался от управляемого ртутного выпрямителя, была пущена в эксплуатацию в 1940 г. Замена электромашинного агрегата ртутным выпрямителем заметно удешевила установку и привела к повышению КПД электропривода.
Революционизирующее влияние на развитие автоматизированного электропривода оказали разработка и производство полупроводниковых приборов - транзисторов, тиристоров, которые благодаря своим преимуществам стали вытеснять ранее применявшиеся в электроприводе устройства с электронными лампами и ионными приборами. Наряду с системой генератор—двигатель (Г - Д), все шире используется более быстродействующая система тиристорный преобразователь - двигатель (ТП - Д).
Быстрое развитие полупроводниковой техники, существенное увеличение выпускаемых тиристоров обусловливают резкое уменьшение их стоимости, поэтому наряду с широким использованием тиристорных преобразователей для приводов постоянного тока осваиваются автоматизированные электроприводы переменного тока, управляемые различного рода тиристорными преобразователями.
Привод переменного тока, в котором используется асинхронный двигатель с короткозамкнутым ротором с частотным управлением, является весьма перспективным и во многих случаях полностью заменяет систему ТП—Д постоянного тока.
Современный автоматизированный электропривод представляет собой сложную электромеханическую систему. Основные блоки системы управления реализуют: ввод данных, слежение за материалом, регистрацию измеряемых данных технологического процесса, автоматическую адаптацию и оптимальное по времени регулирование процесса и другие функции.
Системы автоматического управления электроприводам постоянного и переменного тока, в которых используются все достижения полупроводниковой техники, а также возможности электронной вычислительной техники, позволяют существенно упростить конструкции производственных механизмов, повысить их точность и поднять производительность, т. е. способствовать техническому прогрессу.
Дата: 2019-02-02, просмотров: 280.