В системах самонаведения информация о движении цели воспринимается координатором цели, размещенным в носовой части ЛА; на основе этой информации формируются управляющие сигналы, подаваемые в систему управления, которая обеспечивает движение аппарата по направлению к пеленгуемой цели.
В зависимости от природы сигналов — носителей информации системы самонаведения делятся на радиотехнические, тепловые, световые, акустические и др. Источники сигналов, излучаемых целью, могут находиться на цели или вне её. В последнем случае цель излучает отраженные сигналы. В зависимости от места расположения источников сигналов, излучаемых целью, различают пассив ные (цель является источником излучения, например, теплового), активные (цель облучается источником, расположенным на ЛА, а информация о цели передается отраженными сигналами) и полуактивные (цель облучается источником, расположенным вне цели и ЛА) системы самонаведения. В пассивных системах самонаведения используются тепловые, световые, акустические и иногда радиотехнические (например, наведение на работающие радиосистемы) пеленгаторы. Полуактивные и активные системы, как правило, основаны на пеленгации радиосигналов.
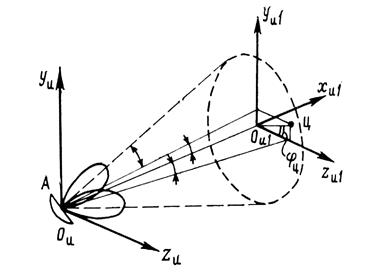
Рис.27
Координатор цели (рис.27) определяет в некоторой системе координат направление линии визирования «ЛА — цель», т. е. выдает сигналы в том случае, когда ось координатора отклоняется от направления на цель. Измеряемые координатором сигналы содержат информацию об угловых рассогласованиях между осью координатора и направлением на цель в двух взаимно перпендикулярных плоскостях и в некоторых случаях расстоянии до цели. Сигналы рассогласования после усиления поступают в вертикальный и горизонтальный каналы управления и подаются на приводы рулей высоты  и направления
и направления  н. Воздействие рулей на ЛА приводит к уменьшению рассогласования.
н. Воздействие рулей на ЛА приводит к уменьшению рассогласования.
В системах самонаведения ЛА наибольшее распространение получили радиолокационные и оптические координаторы.
Оптические координаторы, являющиеся, как правило, пассивными, воспринимают электромагнитную энергию в диапазоне инфракрасных и видимых волн, излучаемую целью. Многие цели (корабли, самолеты, ракеты) являются источниками инфракрасного излучения, поэтому рассмотрим инфракрасный координатор (рис. 28). Инфракрасные лучи от цели воспринимаются оптической системой ОС, которая фокусирует лучистый поток и направляет его на чувствительный элемент ЧЭ. Между оптической системой и чувствительным элементом помещается модулирующий диск М, вращающийся с угловой скоростью  , который позволяет определить угол отклонения цели от оптической оси координатора.
, который позволяет определить угол отклонения цели от оптической оси координатора.
Модулирующий диск состоит из прозрачных и непрозрачных участков, образующих в простейшем случае два пояса — растра.
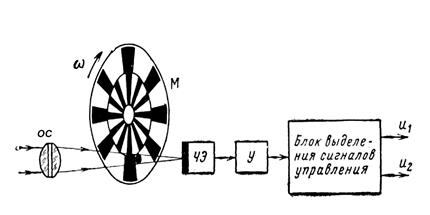
Рис. 28
Диск устанавливается так, чтобы граница раздела поясов — растров проходила через оптическую ось линзы. Если цель находится на оптической оси линзы, то ее изображение совпадает с линией раздела растров и сигнал на выходе чувствительного элемента равен нулю. При отклонении цели от оптической оси ее изображение смещается от границы раздела и попадает на один из растров. Если изображение попадает на внутренний растр, то поток модулируется с частотой  а если на внешний растр — то с частотой
а если на внешний растр — то с частотой  . Попадающие на чувствительный элемент импульсы преобразуются в импульсы электрического тока соответственно частот или .
. Попадающие на чувствительный элемент импульсы преобразуются в импульсы электрического тока соответственно частот или .
В качестве чувствительных элементов используются фотоэлементы, болометры, термисторы и термопары. Сигналы чувствительного элемента усиливаются в усилителе У и затем поступают на блок выделения сигналов управления. Блок выделения сигналов обычно представляет собой два резонансных фильтра, настроенных на частоты и . Сигналы после фильтров поступают на усилители и затем в каналы управления тангажа и курса.
Лекция 23.
План
1. Передаточные функции оптического координатора.
2. Структурная схема системы самонаведения.
3. Понятие о системах телеуправления.
Передаточные свойства оптического координатора определяются в основном передаточными свойствами фильтров, поскольку другие элементы могут быть приняты безынерционными. Следовательно, передаточная функция координатора будет:
где  — собственная частота; d — коэффициент относительного затухания.
— собственная частота; d — коэффициент относительного затухания.
Перейдем к составлению структурных схем систем самонаведения. Для этого выведем кинематическое уравнение движения.
Дифференцируя второе уравнение системы (102) по времени и используя первое уравнение (пренебрегая малым q ), получим
 (127)
(127)
где  и
и  — нормальные ускорения соответственно ЛА и цели.
— нормальные ускорения соответственно ЛА и цели.
Если скорости  и
и  меняются медленно, то членами
меняются медленно, то членами  и
и  можно пренебречь.
можно пренебречь.
При составлении структурных схем систем самонаведения необходимо использовать кинематическое уравнение (127), а также учесть динамику координатора цели, автопилота и ЛА.
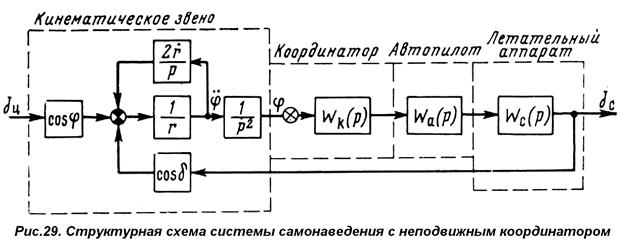
На рис. 29 представлена структурная схема системы самонаведения с неподвижным относительно корпуса ЛА координатором. На схеме выделены кинематическое звено, координатор цели, автопилот и ЛА. Заметим, что на этой схеме не показаны обратные связи с выхода ЛА на вход автопилота, а также не раскрыта структура используемых методов наведения.
Дата: 2019-02-02, просмотров: 712.