Л.А. Рыбак
Роботизация машиностроительного производства
Учебное пособие к проведению лабораторных занятий для студентов направления магистратуры
15.04.05 − Конструкторско-технологическое обеспечение машиностроительных производств
Белгород
2018
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Белгородский государственный технологический университет
им. В.Г.Шухова
Утверждено
научно-методическим советом
университета
Л.А. Рыбак
Роботизация машиностроительного производства
Учебное пособие к проведению лабораторных занятий для студентов направления магистратуры
15.04.05 − Конструкторско-технологическое обеспечение машиностроительных производств
Белгород
2018
УДК 621.865.8(07)
ББК 32.816я7
Р93
Рецензенты:
Доктор технических наук, профессор Белгородского государственного технологического университета им. В.Г. Шухова Т.А. Дуюн
Доктор технических наук, профессор Белгородского государственного университета им. НИУ «БелГУ» А.Н. Афонин
|
В данном учебном пособии рассматривается сборочный стенд, созданный на базе робота с компьютерной системой ЧПУ. Стенд является учебным, предназначенным для изучения, программирования и наладки робота, сборочной операции в целом, но может служить также примером производственных сборочных стендов. На стенде также можно выполнять программирование и наладку сортировочных операций.
Учебное пособие предназначено для студентов направления магистратуры 15.04.05 - Конструкторско-технологическое обеспечение машиностроительных производств.
Данное издание публикуется в авторской редакции.
УДК 621.865.8(07)
ББК 32.816я7
ÓБелгородский государственный
технологический университет
(БГТУ) им. В.Г. Шухова, 2018
| Оглавление | |
| 1. Лабораторная работа №1 Изучение кинематики скоростных характеристик и систем координат робота……………………….. | 6 |
| 2. Лабораторная работа №2 Изучение программного обеспечения для управления роботом «Омега»…………………... | 23 |
| 3. Лабораторная работа №3 Наладка и программирование робота «Омега»……………………………........................................ | 37 |
| 4. Лабораторная работа №4 Изучение работы шагового электропривода, программирование робота для транспортировки деталей................................................................. | 46 |
| 5. Лабораторная работа № 5 Программирование робота для выполнение сборочных операций…………..................................... | 70 |
| 6. Лабораторная работа № 6 Определение точности позиционирования захватного устройства в направлении Z, X, Y | 76 |
Лабораторная работа №1
Изучение кинематики скоростных характеристик и
Систем координат робота
Цель работы —ознакомиться с основными свойствами кинематики промышленного робота, получить знания по существующим системам координат промышленных роботов, на практике научиться определять скорость перемещения звеньев робота для оценки последующей оптимизации управляющих программ.
Задачи:
1. Изучить теоретические сведения о существующих системах координат промышленных роботов
2. Рассмотреть схему робота «Омега»
3. В отчете по лабораторной работе зарисовать схему системы координат робота «Омега».
4. Написать программу для последовательного выхода звеньев робота в крайние точки рабочей зоны по всем осям.
5. Сделать вывод о полученных знаниях.
6.Включить оборудование
7.Запустить управляющее программное обеспечение роботом
8.Измерить скорости звеньев робота
9.Зафиксировать данные в таблице
10.Сделать вывод о полученных навыках
Системы координат робота
Число степеней подвижности и каждое движение робота обеспечивается соответствующей кинематической схемой его механизмов. Кинематические схемы роботов имеют определенные структуры кинематики рук и кисти, которые зависят от вида и последовательности расположения вращательных (В) и поступательных (П) кинематических пар. Разработана классификация кинематических структурных схем руки и манипуляторов, состоящая из пар:
1 – ВВВ, трех вращательных;
2 – ВВП, двух вращательных и одной поступательной;
3 – ПВП, ВПП, ППВ, двух поступательных и одной вращательной;
4 – ППП – трех поступательных.
Форма рабочей зоны и возможности манипулирования объектом также определяются кинематической структурной схемой кисти манипулятора (жесткая, В, ВВ, ВВВ).
Характер переносных степеней подвижности (поступательных и вращательных) определяет базовую систему координат манипулятора. Если поступательных переносных степеней подвижности три (П=3), а вращательных вообще нет (В=0), то базовая система координат является прямоугольной, а рабочая зона имеет форму параллелепипеда (Рисунок 3).

Рис. 3. Прямоугольная система координат
Несмотря на простоту конструкции, ПР с такой системой координат встречаются довольно редко, т.к. имеют большие габариты при малом объеме рабочей зоны и характеризуются сравнительно невысоким быстродействием. Такие роботы обычно либо подвешиваются над обслуживаемым технологическим оборудованием, либо монтируются на направляющих каретках под ним.
В том случае, когда П=2, В=1, рабочая зона ПР приобретает цилиндрическую форму, вернее форму неполного цилиндра (Рисунок 4).

Рис. 4. Цилиндрическая система координат
Соответствующая этому случаю базовая система координат R, H, удобна и получила большое распространение. Она обеспечивает обслуживание большого объема рабочей зоны, но имеет недостаток, связанный с трудностью организации манипулирования предметами на малой высоте.
Если П=1, В=2, то рабочая зона представляет собой неполный шар, а базовая система координат R, , является сферической. Это наиболее универсальная система координат (Рисунок 5). Она обеспечивает обслуживание большего объема рабочей зоны, чем при прямоугольной и цилиндрической системах координат. Однако конструкция манипулятора в этом случае получается более сложной, а ПР нуждается в более сложной системе управления.

Рис. 5. Сферическая система координат
При П=0, В=3 получают ангулярную (угловую) базовую систему координат ,, (Рисунок 6).

Рис. 6. Ангулярная система координат.
Такая система координат наиболее универсальна, обеспечивает обслуживание наибольшего объема рабочей зоны и позволяет строить ПР, обладающие максимальной антропоморфностью. Однако конструкция манипулятора очень сложна, громоздка и предполагает сложную систему управления. Недостатком является также то, что жесткость манипулятора в ней понижена, из-за чего возникают трудности обеспечения необходимой точности позиционирования.
Прямоугольная система координат реализуется тремя поступательными кинематическими парами, цилиндрическая – двумя поступательными и одной вращательной, сферическая – двумя вращательными и одной поступательной, угловая – тремя вращательными.
Анализ кинематических схем манипуляторов показывает две основные особенности:
- оси кинематических пар расположены параллельно либо перпендикулярно друг другу,
- звенья соединены в последовательную кинематическую цепь.
Вместе с тем они имеют ряд существенных недостатков:
- низкий показатель грузоподъемность/масса манипулятора, что обусловлено последовательной схемой соединения звеньев. Действительно, каждый привод должен перемещать не только полезную нагрузку, но и все последующие по цепи звенья.
- погрешности в перемещениях всех шарниров суммируются на концевой точке манипулятора, что приводит к низкой точности позиционирования манипуляторов по сравнению с машинами с декартовой компоновкой,
- относительно низкая жесткость манипуляционных роботов, так как упругое отклонение рабочего органа есть результат накопления деформаций по цепи по всем степеням подвижности робота. Причем весовые коэффициенты этой суммы пропорциональны расстояниям от концевой точки до осей соответствующих шарниров.
Робот Омега работает в цилиндрической системе координат. Направления движений робота указаны на Рисунке 7. G X Y Z

Рис. 7 Направления движений робота.
Области работы промышленного робота «Омега» представлены на Рисунке 8.

Рис. 8. Область рабочей зоны робота «Омега»
Порядок выполнения работы
1.Изучить устройство робота
2.Изучить кинематику промышленного робота.
1.Включите питание робота на блоке управления, отжав кнопку аварийного останова.
2.Запустите программное обеспечение управления роботом (Рисунок1)
3.Выполните выход в ноль по всем осям робота
4.Измерения будут проводиться по отдельности на каждой оси: X,Y,Z.
5.Выставите в программе управления роботом подачу 100% от
максимальной (Рисунок 9).

Рис. 9. Изменение подачи
6.Написав в командной строке кадр для линейной интерполяции, переместите соответствующее звено робота на величину Li, близкую к конечному положению, но не доходящую до нее. Рекомендуется
7.Выбрать целочисленные значения (Рисунок 10).
8.Измерьте секундомером время, за которое звено достигнет заданного положения.
9.Выполните измерения времени перемещения для всех звеньев, посчитайте скорость каждого привода по формуле 1 и заполните таблицу 1.

Где Si – скорость звена, Ti – время в минутах.


Рис. 10. Направления измерений
Таблица 1.
| Li,мм, град | Ti, мин | Sx, м/мин | Sy мм/мин | Sz,мм/мин | |
| X | - | - | |||
| Y | - | - | |||
| Z | - | - |
10. Сделайте вывод о работе
Контрольные вопросы
1.Как классифицируются кинематические пары?
2.Как определить степень подвижности манипулятора?
3.Каковы базовые системы координат манипулятора?
4. Какие звенья входят в конструкцию манипулятора?
5. Что собой представляет структура манипулятора?
6. Как классифицируются кинематические пары?
7. Как определить степень подвижности манипулятора?
8. В какой системе координат работает манипулятор, выполненный по схеме ВПП?
9. В какой системе координат работает манипулятор, выполненный по схеме ППП?
10. В какой системе координат работает манипулятор, выполненный по схеме ВВВ?
11. Для чего нужно вычислять скорость движения звеньев робота?
12. От чего зависит скорость движения звеньев робота?
13. Как шаг ходового винта влияет на скорость линейных перемещений?
14. Как влияет на скорость поворота робота передаточное отношение червячного редуктора?
Лабораторная работа №2
Задачи:
1.Изучить интерфейс программы, ее функционал
2.Написать программу для управления роботом, используя инструменты программного обеспечения
3.Выполнить на практике управление роботом в ручном режиме
4.Запустить автоматическое выполнение программы роботом
5.Сделать выводы о полученных навыках
Выполнение работы:
1.Написать словесный алгоритм движений робота.
2.Преобразовать алгоритм в систему команд в G-код.
3.Привести текст управляющей программы.
4.Записать текст управляющей программы в формате *.txt.
5. Сделать вывод о полученных навыках.
G-код — условное именование языка программирования устройств с числовым программным управлением (ЧПУ). Был создан компанией Electronic Industries Alliance в начале 1960-х. Окончательная доработка была одобрена в феврале 1980 года как стандарт RS274D. Комитет ISO утвердил G-код как стандарт ISO 6983-1:2009, Госкомитет по стандартам СССР — как ГОСТ 20999-83. В советской технической литературе G-код обозначается как код ИСО 7-бит (ISO 7-bit).
Формат кадра. Интерполяция.
G01 X---. Y---. Z---. A---. B---. C---. F--- , где:
G01 - интерполяция;
X,Y,Z,A,B,C – названия осей. Сначала задается наименование оси, затем – числовое значение в единицах перемещения.
Значение X,Y – в миллиметрах, Z –в градусах. Положение осей соответствует указанным на рис.1
G X Y Z
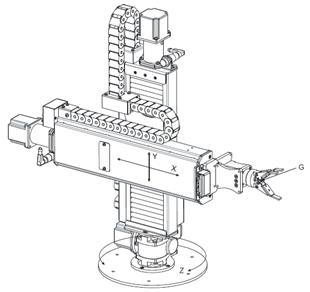
Рис. 1 Расположение координатных осей
Если указаны все параметры перемещения осей в одном кадре, X, Y, Z – выполняется одновременное перемещение по указанным координатам в заданную точку со скоростью F (если указана), посредством линейной интерполяции. Если параметры интерполяции указаны не полностью, например, в каждом кадре отдельно, то робот будет перемещаться, последовательно отрабатывая перемещения по каждой из осей. Если параметр F не указан – перемещение будет выполнено с заданной ранее скоростью.
Например: G01 X10.5 Y25. Z15. F100
Робот выполнит перемещения (одновременное по осям X, Y, поворот по Z) со скоростью F100.
Управление схватом
LOCKERON – Сжатие захвата в установленных пределах. Если необходим усиленный зажим, команда вводится еще раз.
LOCKEROFF – Разжатие захвата.
Обработка условий
Обработка условий используется применительно к проверке состояния линий датчиков (входных сигналов из «внешнего мира»).
IF DX=A THEN, где X- норме линии в формате 1-20, А значение 0 или 1 (логического уровня сигнала)
--------- текст программы по выполнению условия;
ENDIF
Пример:
IF D2=1 THEN если вторая линия имеет уровень 1, то переход
SUBROUTE P1002 на подпрограмму по метке P1002 c возвратом обратно
ENDIF
1002: ‘подпрограмма перемещения при выполнении условия
G01 Z20. F100
G01 Y20. F100
RETURN
IF D1=1 THEN ‘если первая линия имеет уровень 1 то переход
G01 X20. F100 ‘ перемещение по оси X, на скорости 100
ENDIF 1002: G01 Z20. F100 G01 Y20. F100 RETURN
Программа управления роботом имеет простой, сжатый, интуитивно понятный интерфейс. Интерфейс программы представлен на рис. 2.
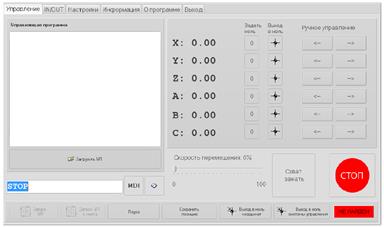
Рис. 2. Интерфейс программы - главный экран
Интерфейс программы.
Главный экран - это основной экран управления роботом. Он находится во вкладке Управление. Путем переключения между вкладками, можно в любой момент работы робота и ПО переключаться между окнами по желанию конечного пользователя.
Запуск ПО:
При запуске ПО делает попытки подключиться к системе управления робота. Если это происходит успешно, то в нижнем правом углу экрана появиться надпись Найден выделенная зеленым цветом. На рисунке 1, показана неудачная попытка соединиться с роботом. Для удачного соединения ПО с системой управления робота нужно, чтобы были выполнены следующие условия:
-Робот и дополнительные блоки должны быть исправны, не иметьмеханических повреждений;
-Использован USB кабель из комплекта;
-Установлены драйвера виртуального COM порта из пакета поставки;
- Программа запущенна в операционной системе Windows 7,8,10 от имени администратора, отключены антивирусные программы, брандмауэр.
Программа имеет несколько рабочих зон, рассмотрим подробнее каждую из них:
4.1. Вкладка Управляющая программа, загрузка УП
(рис. 3):
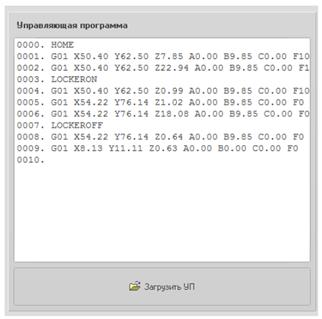
Рис. 3 Вкладка Управляющая программа, загрузка УП
4.2. Консоль ручного преднабора команд –MDI (рис. 4):

Рис. 4 Консоль ручного преднабора
Данное поле предназначено для ручного преднабора команд системы управления роботом. После ввода команды нужно нажать «кнопку MDI».
В данном поле можно вводить все команды, поддерживаемые роботом. Будьте внимательны при вводе команд, во избежание поломок заранее планируйте траекторию работы робота.
Для просмотра истории вводимых команд можно воспользоваться пиктограммой с нарисованной книжкой.
Строка управления

Рис.5 Строка управления
Это поле (Рис. 5) располагается внизу рабочего экрана. Позволяет реализовывать выполнение следующих функций (слева направо):
-«Кнопка Запуск УП »- запускать загруженную управляющую программу.
-«Кнопка Запуск УП с места»-выбрать нужное место в управляющейпрограмме, выделив курсором и запустить выполнение программы с него.
-«Кнопка ПАУЗА»- временно остановить выполнение управляющейпрограммы
-«Кнопка Сохранить позицию»
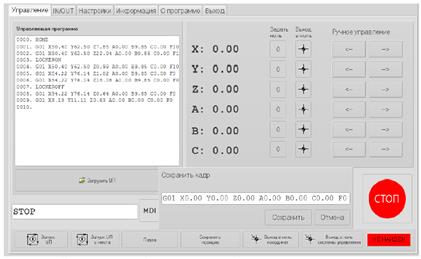
Рис. 6 Окно кнопки «Сохранить позицию»
Ее нажатие приводит к появлению дополнительного окна (Рисунок 6), в котором будет автоматически сформирован кадр управляющей программы для текущей величины перемещения, а также предложение для пользователя по его сохранению во временный файл (вкладка «Информация»).
-«Кнопка Выход в ноль координат» -При нажатии на эту кнопку (Рисунок 7), робот производит выход в ноль системы координат. Будьте внимательны, траектория робота может оказаться сложной и робот, в процессе выполнения команды, может столкнуться с препятствием.
-«Кнопка Выход в ноль системы управления»- При нажатии на эту кнопку робот производит выход в аппаратный ноль, в заданной изготовителем последовательности, производя поиск конечных выключателей. Если какой- то из приводов робота уже находился в зоне сработки конечных выключателей, то система управления робота производит «съезд с конечника» и повторный поиск, для более точной установки ноля.
-отображения координат, задание виртуальных нолей:
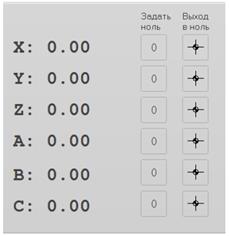
Рис. 7 Окно кнопки «Выход в ноль коорлинат»
Данное поле отображает координаты перемещения робота в заданных единицах (величинах). Так же поле предусматривает возможность выхода робота в аппаратный ноль для каждой оси отдельно.
Важной опцией данного рабочего поля является возможность задания ноля робота. Т.е. пользователь может переместить робота в нужную точку и задать от нее ноль. Это может облегчить написание сложных управляющих программ. При повторном нажатии на кнопку задания ноля - задание можно отменить.
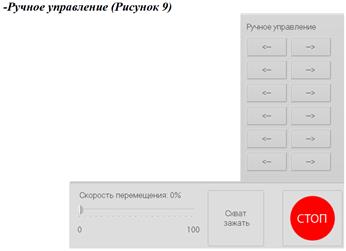
Рис. 8 Окно ручного управления
Поле позволяет производить задание скорости перемещения приводов в процентах от 0 до 100%. Производить зажатие и разжатие схвата, перемещать приводы управления роботом, выполнять аварийный останов.
Лабораторная работа №3
Порядок выполнения работы
1.Изучить устройство робота «Омега».
2.Изучить систему координат робота, направление осей.
3.Научиться составлять алгоритм движения робота
4.Изучить команды для управления роботом
5.Ознакомиться с правилами техники безопасности
6.В соответствии с заданием, выданным преподавателем, составить алгоритм работы робота.
7.Пользуясь режимом преднабора или в ручном режиме, составить управляющую программу
8.Запустить программу в автоматическом режиме, проверить точность наладки.
9. Сохранить УП в файл.
10. В отчете по лабораторной работе привести текст управляющий программы.
11. Сделать вывод о полученных навыках.
12. Ответить на контрольные вопросы.
Контрольные вопросы:
1.Назовите тип двигателя в приводах робота «Омега»
2.Какие особенности имеет процедура захвата детали роботом?
3.В какой системе координат работает робот «Омега»?
4.Какие основные команды реализованы в системе управления роботом?
5.Назовите основные преимущества написания УП в режиме преднабора.
6.Как в программном обеспечении робота «омега» реализован режим преднабора?
7.Как режим преднабора помогает сделать работу с роботом безопаснее?
Лабораторная работа №4
Применение шаговых двигателей (ШД) обусловлено тем, что:
угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны);
обеспечивается прецизионное позиционирование и повторяемость. Шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу;
имеется возможность быстрого старта/остановки/реверсирования;
обеспечивается высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
имеется однозначная зависимость положения от входных импульсов, что обеспечивает позиционирование без обратной связи;
обеспечивается возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Однако ШД имеют следующие недостатки:
шаговым двигателем присуще явление резонанса;
возможна потеря контроля положения ввиду работы без обратной связи;
потребление энергии не уменьшается даже без нагрузки;
затруднена работа на высоких скоростях;
невысокая удельная мощность;
относительно сложная схема управления.
Виды шаговых двигателей:
Существуют три основных типа шаговых двигателей:
двигатели с переменным магнитным сопротивлением,
двигатели с постоянными магнитами,
гибридные двигатели.
Двигатели с переменным магнитным сопротивлением:
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 1.). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 градусов. При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках.
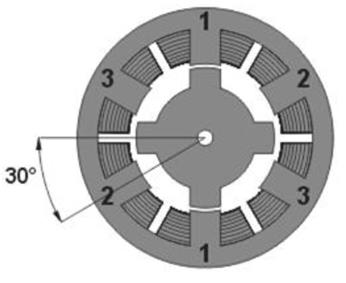
Рис. 1 Двигатель с переменным магнитным сопротивлением
Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
Гибридные двигатели
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 4.).

Рис. 4 Гибридный двигатель.
Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S = 360/(Nph*Ph) = 360/N,
где Nph – число эквивалентных полюсов на фазу, равное числу полюсов ротора, Ph – число фаз, N – полное количество полюсов для всех фаз вместе.
Ротор показанного на рис. 6 двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1,8 градуса.
Продольное сечение гибридного шагового двигателя показано на рис. 5. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.

Рис. 5 Продольный разрез гибридного шагового двигателя
Как видно из рисунка, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая – 0,1 мм. Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Существуют и другие конструкции шаговых двигателей. Например, двигатели с дисковым намагниченным ротором. Такие двигатели имеют малый момент инерции ротора, что в ряде случаев важно.
Большинство современных шаговых двигателей являются гибридными. По сути, гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы, дальше будут рассматриваться только такие двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3,6 градуса или 1

Рис. 6 Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в)
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только четыре простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 6. б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 6. в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствие омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Существует несколько способов управления фазами шагового двигателя. Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис. 7 а). Этот способ называют” one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени используется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.

Рис. 7 Различные способы управления фазами шагового двигателя
Второй способ - управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ” two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 7 б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол- шага. Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис.7 в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Примененные во всех приводах подач данного станка двигатели является униполярным. В данном варианте (имеется виду схема построения управляющего драйвера для каждого двигателя, тип двигателя) имеется возможность коммутации двигателя как в полношаговом режиме, так и полушаговом режиме. В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол шага. Нужно отметить, что эти положения ротор принимает при работе двигателя, но положение ротора не может сохраняться неизменным после выключения тока обмоток. Поэтому при включении и выключении питания двигателя ротор будет смещаться на пол-шага. Для того, чтобы он не смещался при остановке, необходимо подавать в обмотки ток удержания. То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину. Ток удержания может быть меньше номинального, так как от двигателя с неподвижным ротором обычно не требуется большого момента. В нашем случае можно просто ключевать обмотки не используемого двигателя высокой частотой (герц 500-1000) - единственная неприятность при этом – завывание двигателя. Но положительная сторона- уменьшение нагрева управляющих силовых ключей, а также самого двигателя (что не мало важно). Для правильной работы шагового двигателя и получения желательных динамических характеристик от приводов станка необходимо помнить о физике шагового двигателя: чем выше скорость вращения шагового двигателя, тем момент на валу последнего ниже. Шаговый двигатель не может мгновенно начать вращаться с высокой скоростью (точнее может, но не гарантируется, что он сможет преодолеть силу трение покоя в направляющих суппорта станка). Поэтому двигатель желательно разогнать. Обычно для шагового двигателя в технической литературе приводятся две кривые зависимости момента от скорости (рис.8.). Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность нагрузки сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой. Эта область называется областью старта. Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. При измерении максимальной скорости нужно иметь в виду, что из-за явления резонанса момент равен нулю еще и на резонансной частоте.

Рис. 8 Зависимость момента от скорости
Область, которая лежит между кривыми, называется областью разгона. Для того, чтобы работать на большой скорости из области разгона, необходимо стартовать на низкой скорости из области старта, а затем выполнить разгон. При остановке нужно действовать в обратном порядке: сначала выполнить торможение, и только войдя в область старта можно прекратить подачу управляющих импульсов. В противном случае произойдет потеря синхронности и положение ротора будет утеряно. Использование разгона и торможения позволяет достичь значительно больших скоростей - в индустриальных применениях используются скорости до 10000 полных шагов в секунду. Необходимо отметить, что непрерывная работа шагового двигателя на высокой скорости не всегда допустима ввиду нагрева ротора. Однако высокая скорость кратковременно может быть использована при осуществлении позиционирования. При разгоне двигатель проходит ряд скоростей, при этом на одной из скоростей можно столкнуться с неприятным явлением резонанса. Для нормального разгона желательно иметь нагрузку, момент инерции которой как минимум равен моменту инерции ротора. На ненагруженном двигателе явление резонанса проявляется наиболее сильно. Подробно методы борьбы с этим явлением будут описаны ниже.
При осуществлении разгона или торможения важно правильно выбрать закон изменения скорости и максимальное ускорение. Ускорение должно быть тем меньше, чем выше инерционность нагрузки. Критерий правильного выбора режима разгона – это осуществление разгона до нужной скорости для конкретной нагрузки за минимальное время. На практике чаще всего применяют разгон и торможение с постоянным ускорением. Реализация закона, по которому будет производится ускорение или торможение двигателя, обычно производится программно, так как компьютер является источником тактовой частоты для драйвера шагового двигателя. Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя. Когда двигатель совершает шаг, ротор не сразу устанавливается в новую позицию, а совершает затухающие колебания. Дело в том, что систему ротор – магнитное поле – статор можно рассматривать как пружинный маятник, частота колебаний которого зависит от момента инерции ротора (плюс нагрузки) и величины магнитного поля. Ввиду сложной конфигурации магнитного поля, резонансная частота ротора зависит от амплитуды колебаний. При уменьшении амплитуды частота растет, приближаясь к мало амплитудной частоте, которая более просто вычисляется количественно. Эта частота зависит от угла шага и от отношения момента удержания к моменту инерции ротора. Больший момент удержания и меньший момент инерции приводят к увеличению резонансной частоты.
Необходимо заметить, что резонансную частоту определяет момент инерции собственно ротора двигателя плюс момент инерции нагрузки, подключенной к валу двигателя. Поэтому резонансная частота ротора ненагруженного двигателя, которая иногда приводится среди параметров, имеет маленькую практическую ценность, так как любая нагрузка, подсоединенная к двигателю, изменит эту частоту. На практике эффект резонанса приводит к трудностям при работе на частоте, близкой к резонансной. Момент на частоте резонанса равен нулю и без принятия специальных мер шаговый двигатель не может при разгоне пройти резонансную частоту. В любом случае, явление резонанса способно существенно ухудшить точностные характеристики привода.
В системах с низким демпфированием существует опасность потери шагов или повышения шума, когда двигатель работает вблизи резонансной частоты. В некоторых случаях проблемы могут возникать и на гармониках частоты основного резонанса. Существуют методы борьбы с резонансом на уровне алгоритма работы драйвера. Например, можно использовать тот факт, что при работе с двумя включенными фазами резонансная частота примерно на 20% выше, чем с одной включенной фазой. Если резонансная частота точно известна, то ее можно проходить, меняя режим работы. Для компенсации погрешностей для соединения шаговых двигателей с ходовыми винтами использованы полу гибкие муфты. В качестве последних могут быть применены специализированные разрезные муфты либо армированный резиновый шланг. Применение последнего, при испытаниях, показало более удовлетворительные результаты, а именно значительно лучшее демпфирование колебаний шагового двигателя, бесшумность работы, а также предохранение привода от перегрузки при наезде на упор или при попытке фрезерования с большим припуском.
2. Получение задания
На рис.9 изображен вид сверху стенда с роботом. Цифрами 1-4обозначены позиции-ячейки на стеллаже, куда нужно переместить детали. Цифрами I-IV обозначены позиции-ячейки на ступенчатом складе деталей.

Рис. 9 Схема сборочного стенда
На рис. 10 изображены детали для сборки, имеющие свое буквенное обозначение.

Рис. 10 Обозначение деталей для транспортировки
Вариант задания складывается из варианта склада и варианта места на стеллаже согласно следующим таблицам 1 и 2:
Таблица 1
| Деталь | |||
| Ячейка склада | A | B | C |
| I | |||
| II | * | ||
| III | * | ||
| IV | * | ||
Таблица 2
| Деталь | |||
| Ячейка стеллажа | A | B | C |
| 1 | * | * | |
| 2 | |||
| 3 | * | ||
| 4 | |||
Таким образом, пример варианта задания выглядит следующим образом:
III A II B IV C 1 A 1 B 3 C

Рис.11 Направления осей робота
Требуется переместить все детали со склада на стеллаж.
Краткий алгоритм действий:
-включить робот
-вывести робот в «0»
-идти в позицию первой детали
-открыть схват
-опустить схват в позицию на середине детали
-закрыть схват
-поднять деталь
-переместить деталь в заданную позицию на стеллаже
-поставить деталь
-открыть схват
-идти в позицию второй детали
-повторять действия до тех пор, пока все детали не окажутся на стеллаже в ячейках, соответствующих заданному варианту
-вывести робот в «0»
-выключить робот
Действия каждого шага выполняются последовательно с записью каждого положения робота.
Таблица 3
| № | Пояснение | X | Y | Z |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| 7 | ||||
| 8 | ||||
| 9 | ||||
| 10 |
После заполнения Таблицы 3 необходимо привести полный текст управляющей программы робота.
Сделайте выводы о приобретенных навыках.
Контрольные вопросы
1. Какие типы электроприводов применяются в промышленных роботах?
2. Как классифицируются приводы роботов?
3. Почему двигатели называются шаговыми?
4. Какие типы электродвигателей вам известны.
5. В чем достоинства и недостатки шаговых двигателей?
6. В чем особенность гибридных двигателей?
7. Дайте определение дискретности перемещения робота?
8. Какова дискретность перемещения данного робота?
9. Ходовой винт с каким шагом установлен в линейных приводах робота?
10. Назовите тип двигателя в приводах робота «Омега»
11. Какие особенности имеет процедура захвата детали роботом?
12. В какой системе координат работает робот «Омега»?
13. Какие основные команды реализованы в системе управления роботом?
Лабораторная работа № 5
Лабораторная работа № 6
Выполнение работы
Измерительная установка
Измерение отклонения позиционирования производится индикаторной головкой часового типа на штативе. Устанавливается головка на штативе на поверхности одного из стеллажей с таким расчетом, чтобы шток индикатора был перпендикулярен плоскости детали при касании.
В качестве детали выбирается тело, имеющее плоскость с возможностью надежного зажатия его схватом робота. Измерительная установка показана на рис. 3
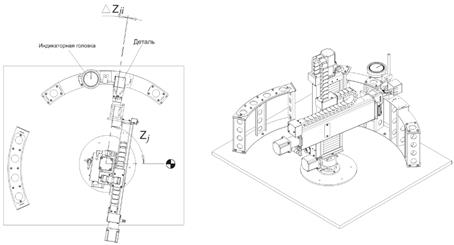
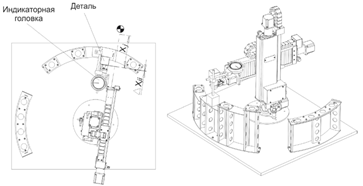
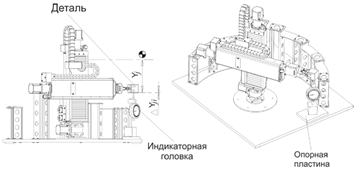
Рис. 3 Измерительная установка
Управляющая программа
После сборки установки следует написать УП для робота. УП должна обеспечивать:
В направлении Z:
- робот должен поворачиваться в направлении Z из положения нуля
- робот по окончании поворота должен коснуться штока индикаторной головки
- после касания робот должен вернуться в начальное положение
- данный цикл должен повториться 10 раз
В направлении Х:
- горизонтальный привод должен перемещать деталь в направлении Х из положения нуля
- робот по окончании движения должен коснуться штока индикаторной головки
- после касания робот должен вернуться в начальное положение (ноль)
- данный цикл должен повториться 10 раз
В направлении Y:
- вертикальный привод должен перемещать деталь в направлении Y из положения нуля
- робот по окончании движения должен коснуться штока индикаторной головки
- после касания робот должен вернуться в начальное положение (ноль)
- данный цикл должен повториться 10 раз
Пример фрагмента УП приведен ниже:
N001 G01 Y/величина поворота/. F100
N002 G01 Y0. /повторить 10 раз/ ………………….
N019 G01 Y/величина поворота/. F100
N020 G01 Y0.
Измерения
Перед измерением величины отклонения, следует выставить индикаторную головку. Для этого нужно повернуть робот на заданное значение. Настроить положение головки на штативе с таким расчетом, чтобы шток коснулся заготовки и переместился на 3-5 мм. После чего выставить индикатор на нулевой отметке. После этой настройки вывести робот в «0» и запустить управляющую программу.
После каждого касания деталью штока индикаторной головки следует заносить показания в таблицу 2.
Фиксирование измерений
Таблица 2
| № | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| ΔZji |
| № | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| ΔXji |
| № | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| ΔYji |
Обработка результатов
ΔZj =…………………..(2)
Rj=……………………..(3)
Sj=……………………...(4)
ΔХj =…………………..(2)
Rj=……………………..(3)
Sj=……………………...(4)
ΔYj =…………………..(2)
Rj=……………………..(3)
Sj=……………………...(4)
Л.А. Рыбак
Роботизация машиностроительного производства
Учебное пособие к проведению лабораторных занятий для студентов направления магистратуры
15.04.05 − Конструкторско-технологическое обеспечение машиностроительных производств
Белгород
2018
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Белгородский государственный технологический университет
им. В.Г.Шухова
Утверждено
научно-методическим советом
университета
Л.А. Рыбак
Дата: 2018-12-21, просмотров: 270.