Виды регулирования
В морских средствах навигации реализованы следующие виды регулирования:
- следящее;
- программное;
- стабилизация.
Следящее регулирование -это регулирование, цель которого заключается в обеспечении соответствия значений управляемых координат заданным, которые меняются по неизвестному заранее закону. Данное регулирование реализовано в следящих системах передачи навигационной информации от различных МСН потребителям.
Программное регулирование -это регулирование, цель которого заключается в обеспечении соответствия значений управляемых координат заданным, которые меняются по известному заранее закону (программе). Программное регулирование реализовано во всех цифровых вычислительных машинах, в том числе, и используемых для управления МСН.
Стабилизация - это регулирование, цель которого заключается в обеспечении постоянства управляемых координат. Стабилизация применяется в гироскопических, инерциальных навигационных, а также астронавигационных системах.
По виду управляющих воздействий различают следующие регулирования:
- аналоговое;
- дискретное;
- числовое.
Аналоговое - это регулирование, при котором вырабатываются непрерывные управляющие воздействия.
Дискретное - это регулирование, при котором вырабатываются ступенчатые управляющие воздействия.
Числовое - это регулирование, при котором вырабатываются управляющие воздействия в виде слов числового кода (команд).
По виду математической модели преобразований входных и выходных координат в САР различают линейное и нелинейное регулирование. Линейное - регулирование, при котором осуществляется линейное преобразование координат. Нелинейное - регулирование, при котором осуществляется нелинейное преобразование координат. Кроме того, САР могут быть с обратной связью и без обратной связи.
Принципы регулирования
В зависимости от степени использования информации, на основе которой вырабатываются управляющие воздействия, различают следующие принципы регулирования:
-разомкнутое;
- по возмущению (принцип компенсации);
-по отклонению (принцип обратной связи);
- комбинированное.
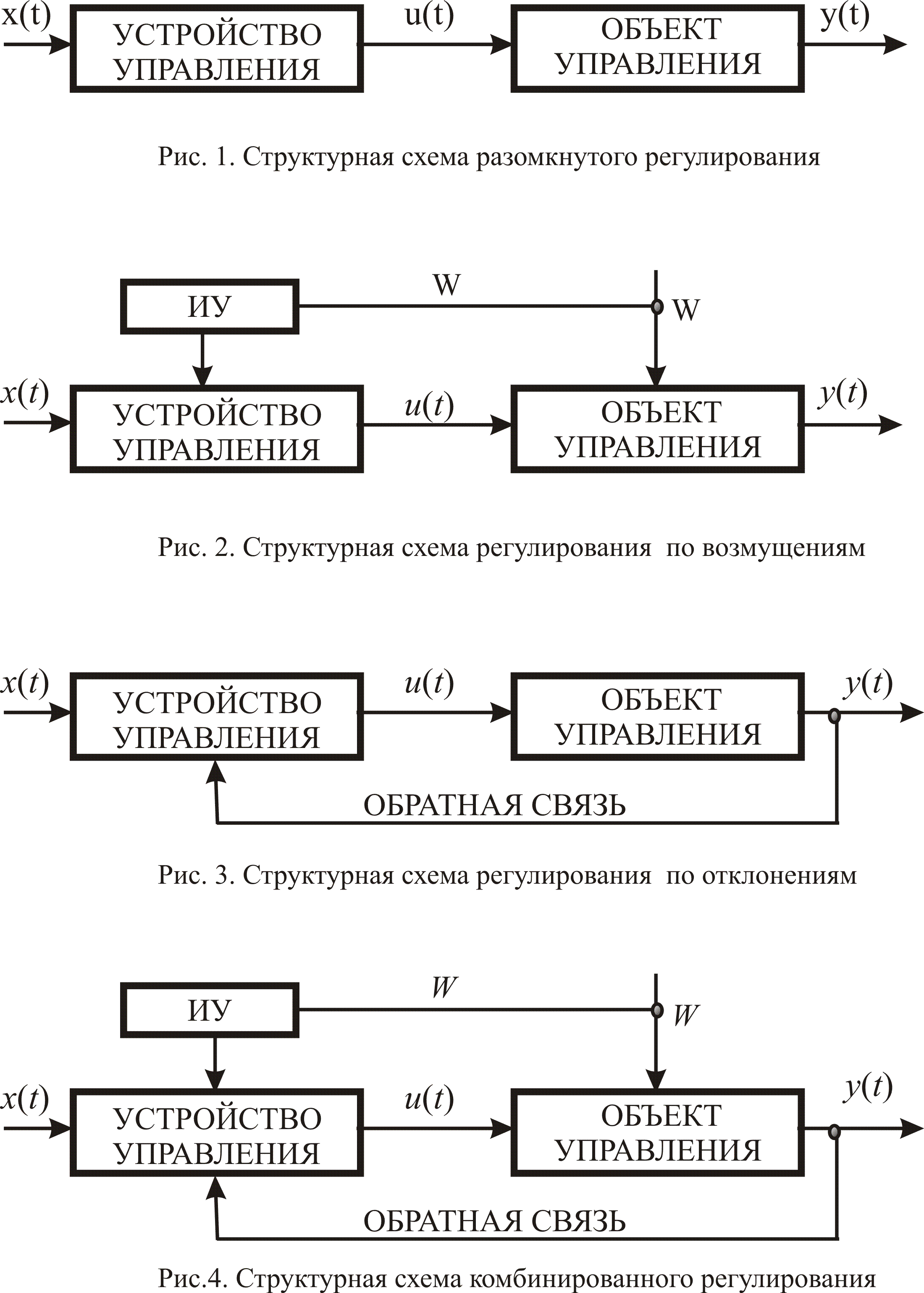
Принцип разомкнутого регулирования. Структурная схема разомкнутой системы автоматического регулирования представлена на рис. 1.3. Сущность принципа разомкнутого регулирования состоит в том, что управляющие воздействия вырабатываются только на основе алгоритма управления, возмущающие воздействия не компенсируются, а отклонения координат управления от требуемых значений не контролируются. Основным недостатком разомкнутых систем является низкая точность управления. Несмотря на очевидные недостатки разомкнутых систем управления, они применяются достаточно широко, благодаря их основному достоинству -высокому быстродействию. Данный принцип применен в системе трансляции скорости от лага до автопрокладчика или значения курса от гирокомпаса до репитера курса рулевого. Внешние возмущающие воздействия в таких системах трансляции практически отсутствуют, а сами системы достаточно просты в устройстве и обладают высоким быстродействием, что и обеспечило их широкое применение.
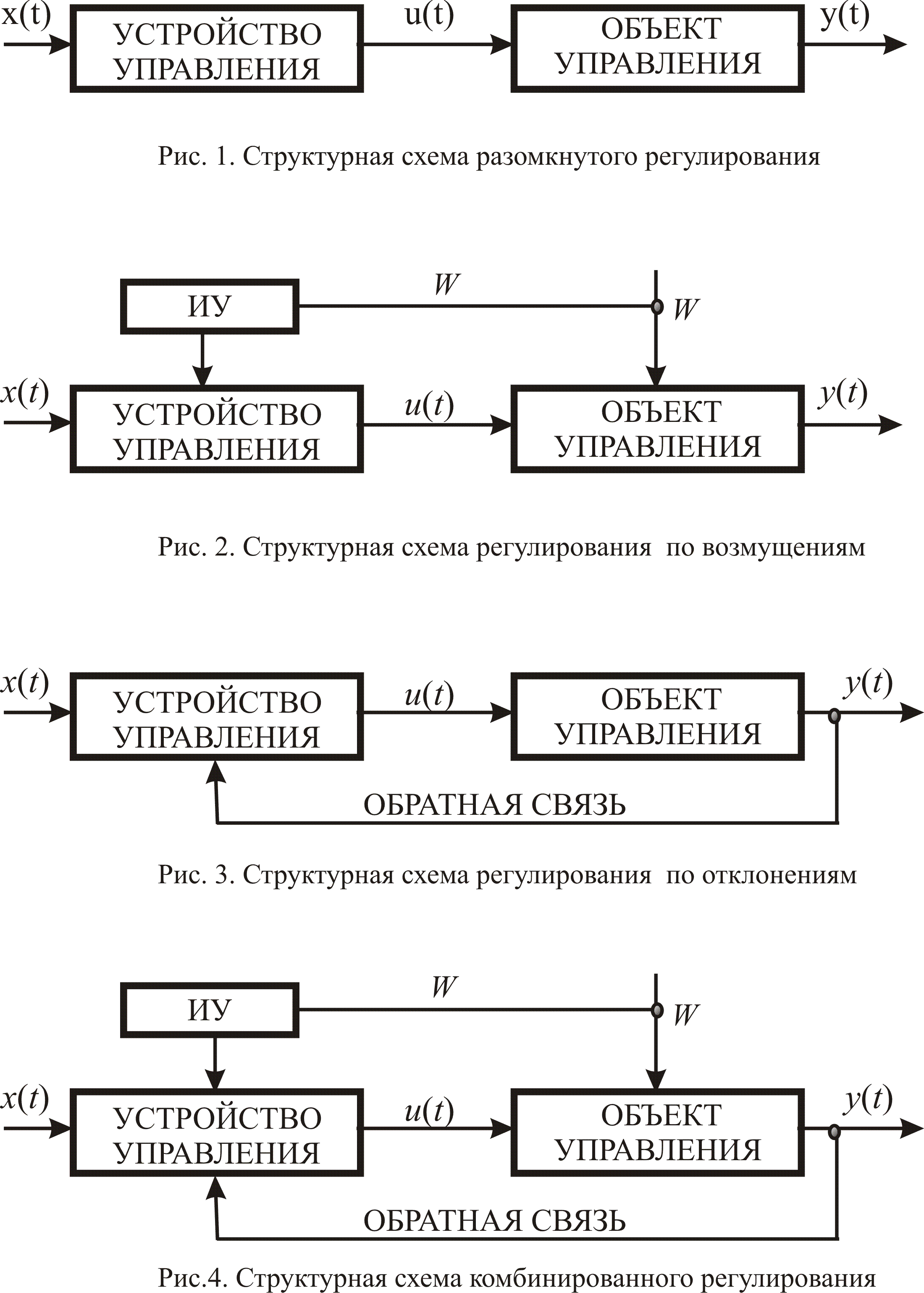
Рис.1.3. Структурная схема разомкнутого регулирования
 Принцип регулирования по возмущению.
Принцип регулирования по возмущению.
Рис. 1.4. Структурная схема регулирования по возмущениям
Структурная схема автоматического управления, реализующая принцип компенсации возмущения, приведена на рис. 1.4, где с помощью измерительного устройства ИУ производится измерение возмущения W, и информация о нем передается в устройство управления для корректуры алгоритма. Как следует из рис. 1.4 схема автоматического управления, построенная по принципу компенсации возмущения, является, в сущности, разновидностью разомкнутой системы. Здесь так же, как и при реализации принципа разомкнутого регулирования не контролируются отклонения выходных параметров объекта управления от требуемых значений. А отличие состоит лишь в том, что предпринята попытка повысить точность работы САР за счет компенсации измеренного внешнего возмущения.
Данный принцип регулирования не имеет обратной связи, и управляющие воздействия вырабатываются только по значениям внешних воздействий. Классическим примером данного принципа регулирования является морской хронометр.
Принцип регулирования по отклонению. Систему автоматического регулирования можно построить так, чтобы точность, выполнения алгоритма управления обеспечивалась и без измерения возмущающего воздействия извне. Для этой цели по так называемой цепи обратной связи информация о выходных параметрах объекта управления поступает в устройство управления. В устройстве управления производится измерение отклонений этих параметров от требуемых значений. В зависимости от величин полученных отклонений вырабатываются корректуры для алгоритма управления, поэтому такой принцип регулирования часто называют управлением по отклонению (рис. 1.5).
Рис. 1.5. Структурная схема регулирования по отклонениям
Принцип обратной связи является основным принципом построения современных САР, используемых в МСН. Одним из классических примеров данной системы регулирования является система авторулевого на корабле.
Комбинированное регулирование. Комбинированное регулирование представляет собой совокупность (сочетание) всех предыдущих видов регулирования (рис. 1.6). В настоящее время оно в МСН не применяется.
Рис. 1.6. Структурная схема комбинированного регулирования
Дата: 2018-12-21, просмотров: 241.